一种高速封路机器人编队控制方法及系统与流程
本发明涉及机器人,具体提供一种高速封路机器人编队控制方法及系统。
背景技术:
1、在高速公路施工或道路维护过程中,封路是一项必需的任务,以确保工作区域的安全。现有的封路方法通常依赖于人工设置标志和告示牌来引导交通。然而,这种方法存在许多缺点,例如人力成本高、操作不便以及需要大量的工作人员。对于发生交通事故需要封路的场景,人力封路的危险性高,容易造成人员伤亡,且时效性不强。
技术实现思路
1、本发明是针对上述现有技术的不足,提供一种实用性强的高速封路机器人编队控制方法。
2、本发明进一步的技术任务是提供一种设计合理,安全适用的高速封路机器人编队控制系统。
3、本发明解决其技术问题所采用的技术方案是:
4、一种高速封路机器人编队控制方法,包括多台封路机器人和一个中央控制中枢,每个所述封路机器人配备uwb定位模块、通信模块、动力驱动模块、导航避障模块、报警灯和喇叭,还固定一个反光锥形桶;
5、所述uwb定位模块确定每个封路机器人的当前位置和姿态;
6、所述通信模块与中央控制中枢进行无线通信,并接收指令;
7、所述动力驱动模块驱动机器人移动;
8、所述导航避障模块包括激光雷达、摄像头,使封路机器人具备自动避障功能;
9、所述报警灯遇到故障时,进行报警;
10、所述喇叭在遇到故障时,喇叭响起。
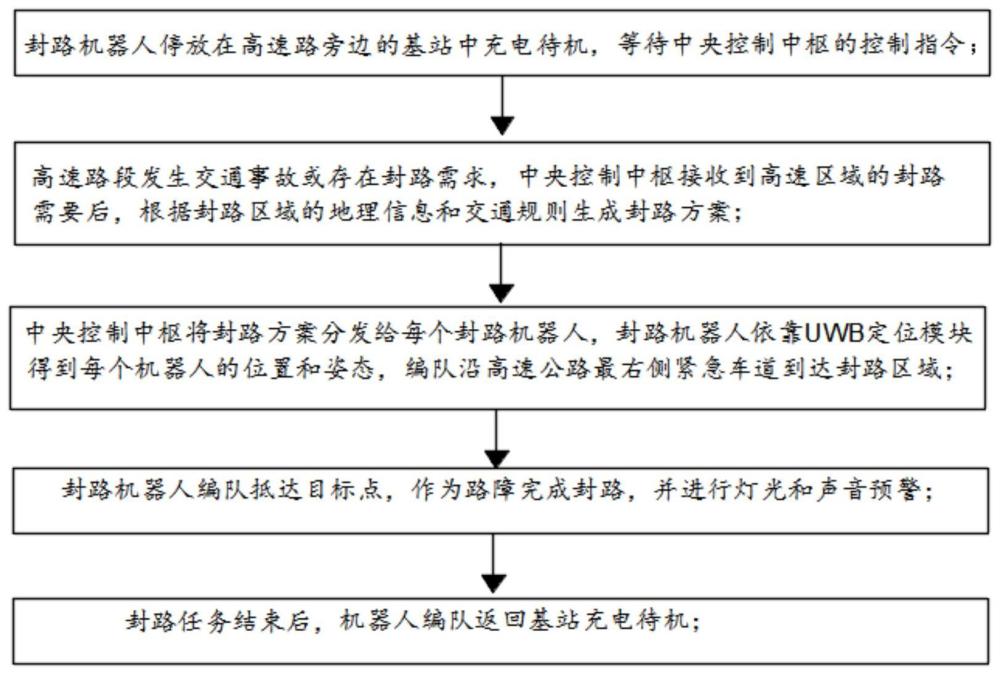
11、进一步的,所述封路机器人停放在高速路旁边的基站中充电待机,等待中央控制中枢的控制指令。
12、进一步的,高速路段发生交通事故或存在封路需求,中央控制中枢接收到高速区域的封路需要后,根据封路区域的地理信息和交通规则生成封路方案;
13、中央控制中枢将封路方案分发给每个封路机器人,封路机器人依靠uwb定位模块得到每个机器人的位置和姿态,编队沿高速公路最右侧紧急车道到达封路区域。
14、进一步的,封路机器人编队抵达目标点,作为路障完成封路,并进行灯光和声音预警,封路任务结束后,机器人编队返回基站充电待机。
15、一种高速封路机器人编队控制系统,包括多台封路机器人和一个中央控制中枢,每个所述封路机器人配备uwb定位模块、通信模块、动力驱动模块、导航避障模块、报警灯和喇叭,还固定一个反光锥形桶;
16、所述uwb定位模块用于确定每个封路机器人的当前位置和姿态;
17、所述通信模块用于与中央控制中枢进行无线通信,并接收指令;
18、所述动力驱动模块用于驱动机器人移动;
19、所述导航避障模块包括激光雷达、摄像头,使封路机器人具备自动避障功能;
20、所述报警灯用于遇到故障时,进行报警;
21、所述喇叭用于在遇到故障时,喇叭响起。
22、进一步的,所述封路机器人停放在高速路旁边的基站中充电待机,等待中央控制中枢的控制指令。
23、进一步的,高速路段发生交通事故或存在封路需求,中央控制中枢接收到高速区域的封路需要后,根据封路区域的地理信息和交通规则生成封路方案;
24、中央控制中枢将封路方案分发给每个封路机器人,封路机器人依靠uwb定位模块得到每个机器人的位置和姿态,编队沿高速公路最右侧紧急车道到达封路区域。
25、进一步的,封路机器人编队抵达目标点,作为路障完成封路,并进行灯光和声音预警,封路任务结束后,机器人编队返回基站充电待机。
26、本发明的一种高速封路机器人编队控制方法及系统和现有技术相比,具有以下突出的有益效果:
27、本发明无人化操作,减少劳动力成本和操作不便,利用uwb定位模块实现高精度定位,保证编队的准确性和稳定性。根据实际需要自动调整编队形状和数量,提高封路效率,可远程控制和监控,提高操作灵活性和工作安全性,隧道内定位可靠。
技术特征:
1.一种高速封路机器人编队控制方法,其特征在于,包括多台封路机器人和一个中央控制中枢,每个所述封路机器人配备uwb定位模块、通信模块、动力驱动模块、导航避障模块、报警灯和喇叭,还固定一个反光锥形桶;
2.根据权利要求1所述的一种高速封路机器人编队控制方法,其特征在于,所述封路机器人停放在高速路旁边的基站中充电待机,等待中央控制中枢的控制指令。
3.根据权利要求2所述的一种高速封路机器人编队控制方法,其特征在于,高速路段发生交通事故或存在封路需求,中央控制中枢接收到高速区域的封路需要后,根据封路区域的地理信息和交通规则生成封路方案;
4.根据权利要求3所述的一种高速封路机器人编队控制方法,其特征在于,封路机器人编队抵达目标点,作为路障完成封路,并进行灯光和声音预警,封路任务结束后,机器人编队返回基站充电待机。
5.一种高速封路机器人编队控制系统,其特征在于,包括多台封路机器人和一个中央控制中枢,每个所述封路机器人配备uwb定位模块、通信模块、动力驱动模块、导航避障模块、报警灯和喇叭,还固定一个反光锥形桶;
6.根据权利要求5所述的一种高速封路机器人编队控制系统,其特征在于,所述封路机器人停放在高速路旁边的基站中充电待机,等待中央控制中枢的控制指令。
7.根据权利要求6所述的一种高速封路机器人编队控制系统,其特征在于,高速路段发生交通事故或存在封路需求,中央控制中枢接收到高速区域的封路需要后,根据封路区域的地理信息和交通规则生成封路方案;
8.根据权利要求7所述的一种高速封路机器人编队控制系统,其特征在于,封路机器人编队抵达目标点,作为路障完成封路,并进行灯光和声音预警,封路任务结束后,机器人编队返回基站充电待机。
技术总结
本发明涉及机器人技术领域,具体提供了一种高速封路机器人编队控制方法及系统,包括多台封路机器人和一个中央控制中枢,每个所述封路机器人配备UWB定位模块、通信模块、动力驱动模块、导航避障模块、报警灯和喇叭,还固定一个反光锥形桶;UWB定位模块确定每个封路机器人的当前位置和姿态;通信模块与中央控制中枢进行无线通信,并接收指令;动力驱动模块驱动机器人移动;导航避障模块包括激光雷达、摄像头,使封路机器人具备自动避障功能;报警灯遇到故障时,进行报警;喇叭在遇到故障时,喇叭响起。与现有技术相比,本发明利用UWB定位模块实现编队的高精度控制和定位,适用于各种高速封路作业场景。
技术研发人员:董锐,宋明明,华逢彬,程瑶,黄洋
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!