基于风场感知与能量增益的无人机航迹规划方法及系统与流程
本发明涉及航空航天,更具体地,涉及一种基于风场感知与能量增益的无人机航迹规划方法及系统。
背景技术:
1、滑翔是自然界中的鸟类从风场中获取能量的主要手段。一方面,鸟类利用上升气流飞行,在上升气流中基本保持相对稳定的状态,称作静态滑翔。另一方面,鸟类利用梯度风飞行,机动飞行穿越风速变化的风场,称作动态滑翔。利用上升气流与梯度风,自然界中的鸟类能够进行长距离、长时间的无动力飞行。
2、无人机在军民领域具有广泛应用,无人机技术发展日新月异。无人机如果能够实现从“对抗”风场转向“利用”风场,模仿鸟类滑翔,其续航能力以及飞行安全性便可大幅提升。
3、在复杂风场环境下,无人机航迹规划的前提是风场感知。在风场感知的基础上进行航迹规划,进而获得能量增益。目前,无人机航迹规划主要应用在无风环境中,现有技术无法确保无人机在复杂风场环境下的安全高效飞行。
4、因此,有必要开发一种基于风场感知与能量增益的无人机航迹规划方法及系统。
5、公开于本发明背景技术部分的信息仅仅旨在加深对本发明的一般背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现思路
1、在本发明提出了一种基于风场感知与能量增益的无人机航迹规划方法及系统,其计算效率高,解决了现有技术无法确保无人机在复杂风场环境下安全高效飞行的问题。
2、第一方面,本公开实施例提供了一种基于风场感知与能量增益的无人机航迹规划方法,包括:
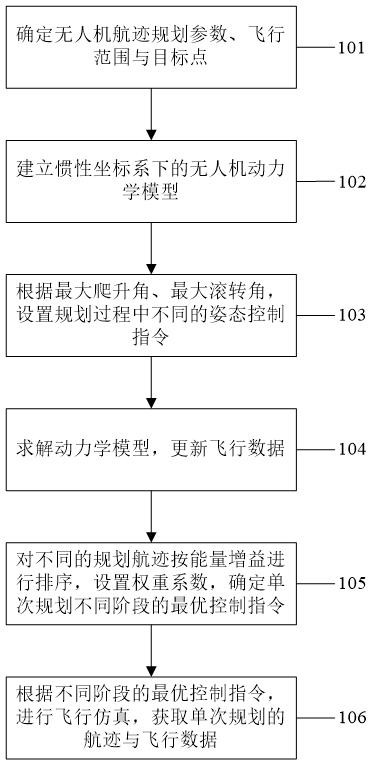
3、确定无人机航迹规划参数、飞行范围与目标点;
4、建立惯性坐标系下的无人机动力学模型;
5、根据最大爬升角、最大滚转角,设置规划过程中不同的姿态控制指令;
6、求解所述动力学模型,更新飞行数据;
7、对不同的规划航迹按能量增益进行排序,设置成本与回报函数的权重系数,确定单次航迹规划过程中不同阶段的最优控制指令;
8、根据不同阶段的最优控制指令,进行飞行仿真,获取单次规划的航迹与飞行数据。
9、优选地,确定目标点包括:
10、根据三维风速采样数据预测所述飞行范围内的时序三维风速,进而预测所述时序三维风速对应的方差;
11、确定所述飞行范围内方差最大的位置为第一点位,确定上升气流最大的位置为第二点位;
12、确定无人机是否能够飞行至所述第一点位,若是,则将所述第一点位设置为所述目标点,若否,将所述第二点位设置为所述目标点。
13、优选地,所述动力学模型为:
14、,
15、其中,l为升力,m为质量,为航迹滚转角,va为空速,γa为航迹爬升角,t为时间,g为重力加速度,为航迹偏航角,为风速的一阶偏导矩阵,代表梯度风,为地速,d为阻力,ρ为密度,s为机翼面积,cd,0为寄生阻力系数,ar为展弦比,e为oswald效率因子。
16、优选地,根据最大爬升角、最大滚转角,设置规划过程中不同的姿态控制指令包括:
17、确定所述最大滚转角与所述最大爬升角;
18、在所述最大滚转角与所述最大爬升角的约束下,设置滚转角速率,计算爬升角速率;
19、以所述滚转角速率与所述爬升角速率作为姿态控制指令。
20、优选地,还包括:
21、重复单次规划,完成总时间内的航迹规划。
22、第二方面,本公开实施例还提供了一种基于风场感知与能量增益的无人机航迹规划系统,包括:
23、存储器,存储有计算机可执行指令;处理器,所述处理器运行所述存储器中的计算机可执行指令,执行以下步骤:
24、确定无人机航迹规划参数、飞行范围与目标点;
25、建立惯性坐标系下的无人机动力学模型;
26、根据最大爬升角、最大滚转角,设置规划过程中不同的姿态控制指令;
27、求解所述动力学模型,更新飞行数据;
28、对不同的规划航迹按能量增益进行排序,设置成本与回报函数的权重系数,确定单次航迹规划过程中不同阶段的最优控制指令;
29、根据不同阶段的最优控制指令,进行飞行仿真,获取单次规划的航迹与飞行数据。
30、优选地,确定目标点包括:
31、根据三维风速采样数据预测所述飞行范围内的时序三维风速,进而预测所述时序三维风速对应的方差;
32、确定所述飞行范围内方差最大的位置为第一点位,确定上升气流最大的位置为第二点位;
33、确定无人机是否能够飞行至所述第一点位,若是,则将所述第一点位设置为所述目标点,若否,将所述第二点位设置为所述目标点。
34、优选地,所述动力学模型为:
35、,
36、其中,l为升力,m为质量,为航迹滚转角,va为空速,γa为航迹爬升角,t为时间,g为重力加速度,为航迹偏航角,为风速的一阶偏导矩阵,代表梯度风,为地速,d为阻力,ρ为密度,s为机翼面积,cd,0为寄生阻力系数,ar为展弦比,e为oswald效率因子。
37、优选地,根据最大爬升角、最大滚转角,设置规划过程中不同的姿态控制指令包括:
38、确定所述最大滚转角与所述最大爬升角;
39、在所述最大滚转角与所述最大爬升角的约束下,设置滚转角速率,计算爬升角速率;
40、以所述滚转角速率与所述爬升角速率作为姿态控制指令。
41、优选地,还包括:
42、重复单次规划,完成总时间内的航迹规划。
43、其有益效果在于:
44、本发明建立了惯性坐标系下的无人机动力学模型,模型中考虑了风速。通过设置成本与回报类型函数的权重系数,确定不同阶段的最优控制指令。在风场感知的基础上进行航迹规划,并将生成的航迹发送给飞控机,由飞控机控制电气执行机构按规划的航迹飞行。本发明的计算效率高,解决了现有技术无法确保无人机在复杂风场环境下安全高效飞行的问题。
45、本发明的方法和装置具有其它的特性和优点,这些特性和优点从并入本文中的附图和随后的具体实施方式中将是显而易见的,或者将在并入本文中的附图和随后的具体实施方式中进行详细陈述,这些附图和具体实施方式共同用于解释本发明的特定原理。
技术特征:
1.一种基于风场感知与能量增益的无人机航迹规划方法,其特征在于,包括:
2.根据权利要求1所述的基于风场感知与能量增益的无人机航迹规划方法,其中,确定目标点包括:
3.根据权利要求2所述的基于风场感知与能量增益的无人机航迹规划方法,其中,所述动力学模型为:
4.根据权利要求3所述的基于风场感知与能量增益的无人机航迹规划方法,其中,根据最大爬升角、最大滚转角,设置规划过程中不同的姿态控制指令包括:
5.根据权利要求1所述的基于风场感知与能量增益的无人机航迹规划方法,其中,还包括:
6.一种基于风场感知与能量增益的无人机航迹规划系统,其特征在于,该系统包括:
7.根据权利要求6所述的基于风场感知与能量增益的无人机航迹规划系统,其中,确定目标点包括:
8.根据权利要求7所述的基于风场感知与能量增益的无人机航迹规划系统,其中,所述动力学模型为:
9.根据权利要求8所述的基于风场感知与能量增益的无人机航迹规划系统,其中,根据最大爬升角、最大滚转角,设置规划过程中不同的姿态控制指令包括:
10.根据权利要求6所述的基于风场感知与能量增益的无人机航迹规划系统,其中,还包括:
技术总结
本申请公开了一种基于风场感知与能量增益的无人机航迹规划方法及系统。该方法可以包括:确定无人机航迹规划参数、飞行范围与目标点;建立惯性坐标系下的无人机动力学模型;根据最大爬升角、最大滚转角,设置规划过程中不同的姿态控制指令;求解动力学模型,更新飞行数据;对不同的规划航迹按能量增益进行排序,设置成本与回报函数的权重系数,确定单次航迹规划过程中不同阶段的最优控制指令;根据不同阶段的最优控制指令,进行飞行仿真,获取单次规划的航迹与飞行数据。本发明的计算效率高,解决了现有技术无法确保无人机在复杂风场环境下安全高效飞行的问题。
技术研发人员:吕鹏,杨家骥,张振,陈志平
受保护的技术使用者:中国航天空气动力技术研究院
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!