一种针对飞行器姿控系统执行器的故障诊断方法
本发明属于飞行器姿控系统执行器故障诊断,一种针对飞行器姿控系统执行器的故障诊断方法。
背景技术:
1、姿态控制系统是飞行器的最重要的分系统之一,其正常与否将直接影响飞行器完成既定飞行任务的能力。然而,飞行器有时会处于极端的飞行条件下,这种恶劣的飞行环境会导致飞行器易受风干扰、气流扰动等多种因素的影响,进而使得飞行器姿控系统很有可能发生故障。现有研究资料表明,执行机构故障是飞行器众多故障模式中发生几率最高、造成后果最严重的故障模式之一。因此,一旦飞行器的姿控系统执行器发生了故障且不能得到快速准确的处理,将会给飞行器的安全带来极大威胁。这就对飞行器姿控系统执行器的故障诊断方法提出了高的要求。
2、目前,大多数关于飞行器姿控系统执行器故障诊断的研究都只停留在力矩层面,不能诊断具体到执行器层面的故障信息,这不利于后续针对故障的恢复技术。部分研究能够诊断到执行器层面的故障信息,但是这些研究工作中许多并没有考虑执行器的耦合关系,将执行器的分配矩阵线性化,这将飞行器姿控系统执行器的故障诊断问题简化了很多,导致无法在短时间内准确的检测和隔离出执行器故障。
技术实现思路
1、针对现有技术中存在的没有考虑执行器的耦合关系,将飞行器姿控系统执行器的故障诊断问题简化了很多的情况,导致无法在短时间内准确的检测和隔离出执行器故障。本发明提供一种针对飞行器姿控系统执行器的故障诊断方法,可以在短时间内实现准确的故障检测和故障隔离,为后续实现飞行器姿控系统执行器的故障恢复提供基础。
2、为达到上述目的,本发明采用了以下技术方案:
3、一种针对飞行器姿控系统执行器的故障诊断方法,包括:
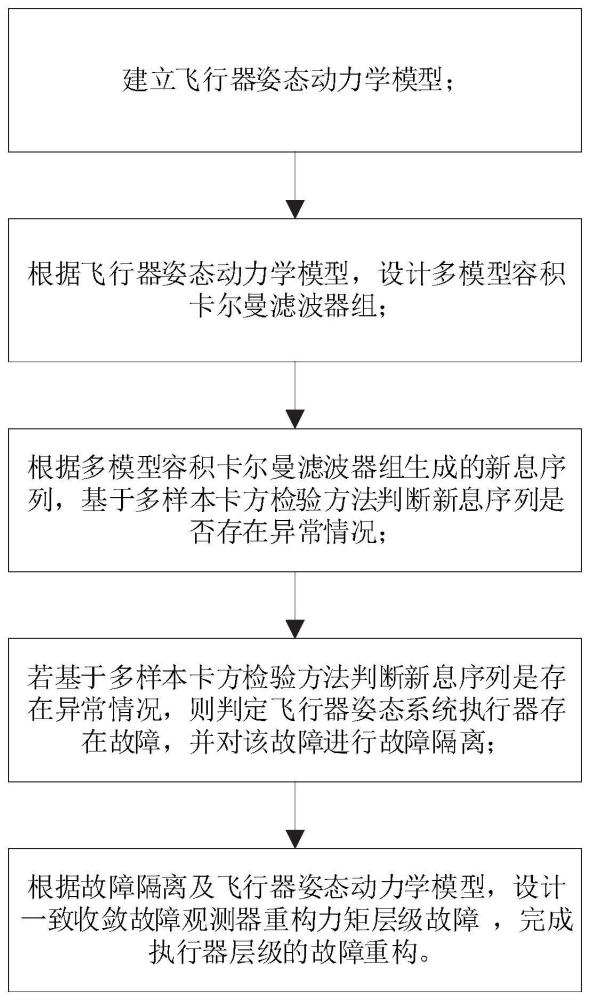
4、建立飞行器姿态动力学模型;
5、根据飞行器姿态动力学模型,设计多模型容积卡尔曼滤波器组;
6、根据多模型容积卡尔曼滤波器组生成的新息序列,基于多样本卡方检验方法判断新息序列是否存在异常情况;
7、若基于多样本卡方检验方法判断新息序列是存在异常情况,则判定飞行器姿态系统执行器存在故障,并对该故障进行故障隔离;
8、根据故障隔离及飞行器姿态动力学模型,设计一致收敛故障观测器重构力矩层级故障d,完成执行器层级的故障重构。
9、作为本发明的进一步解释,所述建立飞行器姿态动力学模型,具体表现方式如下:
10、
11、其中,ω表示飞行器姿态角速度,j为飞行器惯量矩阵,ud为飞行器所受理论三轴力矩,d表示飞行器所受的综合故障;
12、所述飞行器所受的综合故障d=j-1d+uf;
13、其中,uf为飞行器所受力矩层级故障,d为飞行器所受外界干扰。
14、作为本发明的进一步解释,所述根据飞行器姿态动力学模型建立无故障的状态空间方程,并对无故障的状态空间方程进行离散化处理,获取离散总状态空间方程;
15、将执行器输出量增广到离散总状态空间方程中得到增广状态空间方程;
16、基于离散总状态空间方程及增广状态空间方程,设计多模型容积卡尔曼滤波器组。
17、作为本发明的进一步解释,所述根据多模型容积卡尔曼滤波器组生成的新息序列共m+1组,其中m为执行器数量,新息序列具体表示如下:
18、
19、
20、其中,表示第k时刻总滤波器的新息,表示总滤波器第k时刻量测向量估计,表示第k时刻子滤波器i的新息,表示子滤波器i第k时刻量测向量估计。
21、作为本发明的进一步解释,所述基于多样本卡方检验方法判断新息序列是否存在异常情况,是需要构造新的新息基于根据新的新息构造得到的统计量判断新息序列是否存在异常情况;
22、若统计量小于设定阀值,则新息序列无异常情况;
23、若统计量大于设定阀值,则新息序列存在异常情况。
24、作为本发明的进一步解释,所述新的新息:
25、
26、其中,表示第j个新的新息,n表示多样本检验窗口长度;
27、所述根据新的新息构造得到的统计量:
28、
29、其中,表示新的新息的协方差矩阵,表示新息的协方差矩阵,该协方差矩阵在滤波过程中计算得到。
30、作为本发明的进一步解释,所述基于多样本卡方检验方法判断新息序列是存在异常情况,则判定飞行器姿态系统执行器存在故障,之后:
31、判断新息序列中新息是否存在异常;
32、若新息无异常,则判定第i个执行器发生故障,完成故障隔离。
33、作为本发明的进一步解释,所述根据故障隔离及飞行器姿态动力学模型,设计一致收敛故障观测器重构力矩层级故障d,设计目标函数,并对目标函数进行优化,从而完成执行器层级的故障重构。
34、作为本发明的进一步解释,所述目标函数的具体表现形式如下:
35、
36、其中,λn(r)表示将矩阵im×m中第n个对角项替换为r得到矩阵,n表示第n个执行器故障,q1∈r3×3表示权重系数矩阵。
37、作为本发明的进一步解释,,所述基于多样本卡方检验方法判断新息序列是否存在异常情况,若基于多样本卡方检验方法判断新息序列是无异常情况,则判定所有执行器正常,无需进行故障隔离及故障重构,故障诊断直接结束。
38、与现有技术相比,本发明具有以下有益效果。
39、本发明一种针对飞行器姿控系统执行器的故障诊断方法,是通过建立飞行器姿态动力学模型,并设计多模型容积卡尔曼滤波器组,基于滤波器组生成的新息序列进行多样本卡方检验,根据检验结果实现飞行器姿态系统执行器的故障检测和故障隔离。其中,容积卡尔曼滤波器能够处理像复杂飞行器这样具有较强非线性的系统,且不用像扩展卡尔曼滤波器一样计算雅可比矩阵,操作简单。因此,本发明可以在短时间内准确地检测和隔离出执行器故障,避免航空事故的发生,为后续实现飞行器姿控系统执行器的故障恢复提供基础,提高了飞行器的安全性和可靠性,减少了由于飞行器故障产生的不良后果。根据故障隔离信息和设计一致收敛故障观测器重构力矩层级故障,设计目标函数,通过优化该函数重构执行器层级故障,固定时间的高阶滑模故障观测器能够实现固定时间收敛,不需考虑初值范围,能够快速准确地重构出系统故障。
技术特征:
1.一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,包括:
2.根据权利要求1所述的一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,所述建立飞行器姿态动力学模型,具体表现方式如下:
3.根据权利要求1所述的一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,所述根据飞行器姿态动力学模型建立无故障的状态空间方程,并对无故障的状态空间方程进行离散化处理,获取离散总状态空间方程;
4.根据权利要求1所述的一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,所述根据多模型容积卡尔曼滤波器组生成的新息序列共m+1组,其中m为执行器数量,新息序列具体表示如下:
5.根据权利要求1所述的一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,所述基于多样本卡方检验方法判断新息序列是否存在异常情况,是需要构造新的新息基于根据新的新息构造得到的统计量判断新息序列是否存在异常情况;
6.根据权利要求5所述的一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,所述新的新息:
7.根据权利要求1所述的一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,所述基于多样本卡方检验方法判断新息序列是存在异常情况,则判定飞行器姿态系统执行器存在故障,之后:
8.根据权利要求1所述的一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,所述根据故障隔离及飞行器姿态动力学模型,设计一致收敛故障观测器重构力矩层级故障d,设计目标函数,并对目标函数进行优化,从而完成执行器层级的故障重构。
9.根据权利要求8所述的一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,所述目标函数的具体表现形式如下:
10.根据权利要求1所述的一种针对飞行器姿控系统执行器的故障诊断方法,其特征在于,所述基于多样本卡方检验方法判断新息序列是否存在异常情况,若基于多样本卡方检验方法判断新息序列是无异常情况,则判定所有执行器正常,无需进行故障隔离及故障重构,故障诊断直接结束。
技术总结
本发明公开了一种针对飞行器姿控系统执行器的故障诊断方法,属于飞行器姿控系统执行器故障诊断技术领域。方法包括建立飞行器姿态动力学模型;根据飞行器姿态动力学模型,设计多模型容积卡尔曼滤波器组;根据多模型容积卡尔曼滤波器组生成的新息序列,基于多样本卡方检验方法判断新息序列是否存在异常情况;若基于多样本卡方检验方法判断新息序列是存在异常情况,则判定飞行器姿态系统执行器存在故障,并对该故障进行故障隔离;根据故障隔离及飞行器姿态动力学模型,设计一致收敛故障观测器重构力矩层级故障,完成执行器层级的故障重构。本发明可以在短时间内实现准确的故障诊断,为后续实现飞行器姿控系统执行器的故障恢复提供基础。
技术研发人员:党朝辉,毕诚,岳晓奎,刘闯,汪雪川
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!