一种基于风场补偿的自抗扰伞翼无人机控制方法和系统
本发明属于伞翼无人机的自主归航,更具体的是涉及一种基于风场补偿的自抗扰伞翼无人机控制方法和系统。
背景技术:
1、伞翼无人机通过在负载后部安装推力装置,以提高飞行速度,并以此控制系统的飞行高度。相比传统的无动力翼伞系统,伞翼无人机具有更长的留空时间和可控的飞行高度,从而可以完成更为复杂的飞行任务。因此在战场侦察、干扰作战和空投补给等领域具有更广阔的应用前景。
2、目前,实现飞行高度的稳定控制,完成定高飞行,已成为动力翼伞系统最基本的控制目标。
3、但与传统的刚性无人飞行器不同,伞翼无人机采用柔性伞衣来提供系统的升力。柔性伞体在空中会发生复杂的形态变化,导致伞翼无人机具有强非线性特性和复杂的运动特性。除此之外,伞翼无人机的升力主要取决于系统的空速。然而,在伞翼无人机的飞行过程中,环境中的风场会实时变化,从而改变系统的升力,这也是伞翼无人机高度控制中最大的扰动因素。
4、伞翼无人机由于其柔性伞体和复杂风场的影响,其运动特性和高度控制具有一定的挑战性。这就需要针对伞翼无人机的非线性特性和扰动因素进行适当的建模和控制策略设计,以实现稳定的高度控制和精确的飞行任务执行。在这方面,相关发明和技术的发展对于动力翼伞系统的进一步应用和性能提升至关重要。
技术实现思路
1、有鉴于此,本发明提供了一种基于风场补偿的自抗扰伞翼无人机控制方法和系统,通过在线识别风场,基于风场前馈补偿的抗扰控制策略,结合自抗扰控制,充分发挥扩张状态观测器可将外界风场视为总扰动的一部分的特点,预先对风场在高度通道上的干扰进行补偿,实现动力翼伞系统高度跟踪。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种基于风场补偿的自抗扰伞翼无人机控制方法,包括如下步骤:
4、识别风场干扰,得到风场速度;
5、根据所述风场速度得到风速干扰补偿量;
6、根据所述风速干扰补偿量对高度控制进行补偿,得到高度控制量;
7、根据所述高度控制量对伞翼无人机进行控制。
8、优选的,采用深度q学习迭代反演算法识别风场干扰,风场识别的过程包括:
9、确定控制参量,获取实际飞行轨迹,
10、构建动态模型,生成所述控制参量对应的动态轨迹;
11、根据所述实际飞行轨迹与动态轨迹的偏差,利用dqn算法识别风场速度,以确保不陷入局部最优;
12、利用cpso算法对风场速度进行优化,使风场接近最优风场,得到优化后的风场速度。
13、优选的,将经dqn算法识别的风场值优化为二维输出。以确保风场值映射到动作空间。
14、优选的,当飞行轨迹包括多个控制周期时,在利用所述动态模型对下一个控制周期进行动态模拟前,将初始状态调整为上一周期的最后状态;用于消除误差累积效应,在每个周期内实现更稳定的轨迹模拟效果。
15、优选的,所述伞翼无人机包括伞体和负载,所述动态模型基于伞体和负载的动量和动量矩,分别对伞体和负载进行受力分析,并结合伞体和负载之间的约束进行构建。
16、优选的,所述动态模型的边界条件为:
17、vo=vw+tvp
18、vo表示观测速度,vw表示风速,vp表示伞翼无人机速度,t表示从坐标系到大地坐标系的转换矩阵。
19、优选的,获取伞翼无人机的控制参量,按如下公式根据风场速度获得风速干扰补偿量;
20、
21、其中,uw表示风速干扰补偿量,vw表示风场速度,且vw=[uw vw ww]t,其他参量为控制固定参数。
22、优选的,所述高度控制还采用如下公式,进行自抗扰控制;
23、
24、式中,为翼伞高度的加速度,为翼伞的垂直速度,wdtr(t)表示翼伞所受扰动;u为控制量;b为控制增益,kp和kd为pd控制器的控制参数,r2表示系统的目标飞行高度,z(t)=[z1 z2 z3]t为扩张状态观测器的状态观测值。
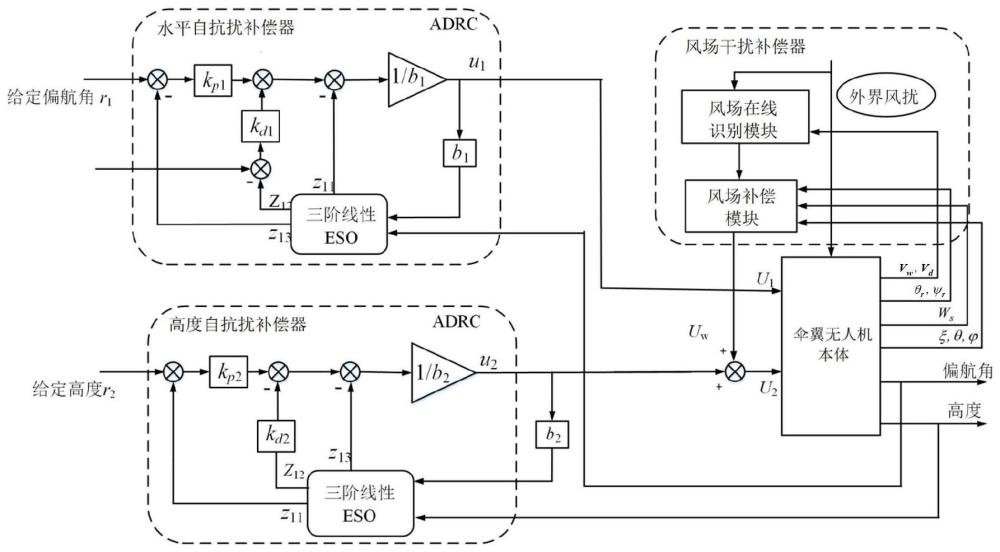
25、一种基于风场补偿的自抗扰伞翼无人机控制系统,包括伞翼无人机本体,高度自抗扰控制器以及风场干扰补偿器。
26、所述高度自抗扰控制器用于根据给定高度进行自抗扰控制,得到高度控制量;
27、所述风场干扰补偿器用于识别风场并获得风速干扰补偿量;
28、所述伞翼无人机本体基于高度控制量和风速干扰补偿量进行飞行控制。
29、优选的,风场干扰补偿器包括风场在线识别模块和风场补偿模块,
30、所述风场在线识别模块包括:
31、实际飞行轨迹获取单元,用于获取控制参量下的实际飞行轨迹;
32、动态轨迹模拟单元,内置动态模型,用于根据所述控制参量生成对应的动态轨迹;
33、风场识别单元,用于利用dqn模型,根据实际飞行轨迹与动态轨迹的偏差,识别风场速度,并利用cpso算法进行优化;
34、所述风场补偿模块,用于采集所述伞翼无人机本体的控制参数,根据所述风场速度,获得风速干扰补偿量。
35、优选的,还包括水平自抗扰补偿器,用于根据给定的偏航角进行自抗扰控制,得到水平控制量。
36、经由上述的技术方案可知,本发明公开提供了一种基于风场补偿的自抗扰伞翼无人机控制方法和系统,与现有技术相比,本发明提出的基于风场前馈补偿的抗扰控制策略,通过识别风场,预先对风场在高度通道上的干扰进行补偿,实现了伞翼无人机高精度的高度跟踪控制。
技术特征:
1.一种基于风场补偿的自抗扰伞翼无人机控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于风场补偿的自抗扰伞翼无人机控制方法,其特征在于,采用深度q学习迭代反演算法识别风场干扰,风场识别的过程包括:
3.根据权利要求2所述的一种基于风场补偿的自抗扰伞翼无人机控制方法,其特征在于,将经dqn算法识别的风场值优化为二维输出。
4.根据权利要求2所述的一种基于风场补偿的自抗扰伞翼无人机控制方法,其特征在于,当飞行轨迹包括多个控制周期时,在利用所述动态模型对下一个控制周期进行动态模拟前,将初始状态调整为上一周期的最后状态。
5.根据权利要求2所述的一种基于风场补偿的自抗扰伞翼无人机控制方法,其特征在于,伞翼无人机包括伞体和负载,所述动态模型基于伞体和负载的动量和动量矩,分别对伞体和负载进行受力分析,并结合伞体和负载之间的约束进行构建。
6.根据权利要求1所述的一种基于风场补偿的自抗扰伞翼无人机控制方法,其特征在于,获取伞翼无人机的控制参量,按如下公式根据风场速度获得风速干扰补偿量;
7.根据权利要求1所述的一种基于风场补偿的自抗扰伞翼无人机控制方法,其特征在于,高度控制还采用如下公式,进行自抗扰控制;
8.一种基于风场补偿的自抗扰伞翼无人机控制系统,其特征在于,包括伞翼无人机本体,高度自抗扰控制器以及风场干扰补偿器,
9.根据权利要求8所述的一种基于风场补偿的自抗扰伞翼无人机控制系统,其特征在于,风场干扰补偿器包括风场在线识别模块和风场补偿模块,
10.根据权利要求8所述的一种基于风场补偿的自抗扰伞翼无人机控制系统,其特征在于,还包括水平自抗扰补偿器,用于根据给定的偏航角进行自抗扰控制,得到水平控制量。
技术总结
本发明公开了一种基于风场补偿的自抗扰伞翼无人机控制方法和系统,属于伞翼无人机自主归航领域。方法包括识别风场干扰,得到风场速度;根据所述风场速度得到风速干扰补偿量;根据所述风速干扰补偿量对高度控制进行补偿,得到高度控制量;根据所述高度控制量对伞翼无人机进行控制。本发明通过识别风场,预先对风场在高度通道上的干扰进行补偿,实现了伞翼无人机高精度的高度跟踪控制。
技术研发人员:孙青林,杨金山,孙昊,郑月敏,卢伟涛
受保护的技术使用者:南开大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!