机器人的沿边行驶控制方法、装置、机器人和存储介质与流程
本申请属于机器人,尤其涉及一种机器人的沿边行驶控制方法、装置、机器人和存储介质。
背景技术:
1、机器人常常需要在任务区域内沿边行驶。例如扫地机器人可以在室内沿边行驶并进行清扫、割草机器人可以在室外沿边行驶并执行割草工作。沿边行驶通常期望机器人从起点开始沿边移动并最终回到起点,形成正确的路径闭合。但实际应用中,由于窄通道或者动态障碍物的干扰,沿边行驶可能出现沿边误闭合的异常现象。沿边误闭合是指机器人在回到起点前,重新回到已行驶过的沿边路径上,形成错误的闭合。此时,机器人将沿着该错误的闭合绕圈行驶。
2、因此,需要一种能够对沿边误闭合的异常现象进行处理的方式。
技术实现思路
1、本申请实施例提供一种机器人的沿边行驶控制方法、装置、机器人和存储介质,可以对沿边误闭合的异常现象进行处理,保障沿边行驶的可靠性。
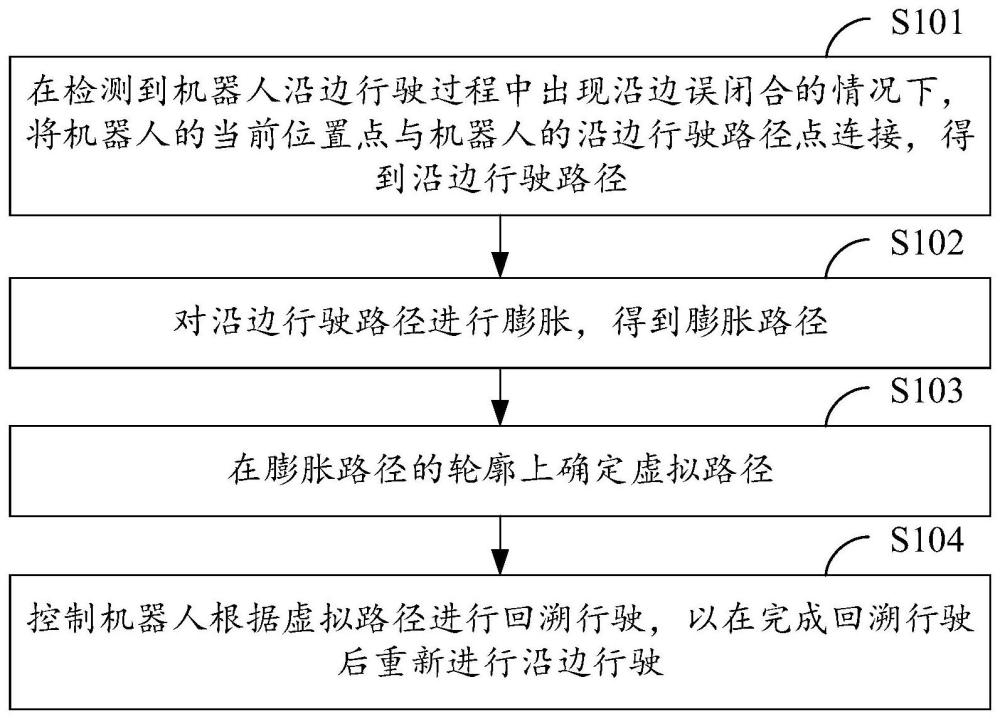
2、本申请实施例第一方面提供一种机器人的沿边行驶控制方法,包括:在检测到所述机器人沿边行驶过程中出现沿边误闭合的情况下,将所述机器人的当前位置点与所述机器人的沿边行驶路径点连接,得到沿边行驶路径;对所述沿边行驶路径进行膨胀,得到膨胀路径;在所述膨胀路径的轮廓上确定虚拟路径,所述虚拟路径上的路径点与所述当前位置点的距离大于第一距离阈值;控制所述机器人根据所述虚拟路径进行回溯行驶,以在完成回溯行驶后重新进行沿边行驶。
3、在第一方面的一些实施方式中,所述在所述膨胀路径的轮廓上确定虚拟路径,包括:提取所述膨胀路径的轮廓;在所述轮廓的轮廓点中确定出所述虚拟路径上的路径点;基于所述虚拟路径上的路径点,确定所述虚拟路径。
4、在第一方面的一些实施方式中,所述机器人沿边行驶时的行驶方向为第一方向;所述在所述轮廓的轮廓点中确定出所述虚拟路径上的路径点,包括:在所述轮廓的轮廓点中,将与所述当前位置点距离最近的轮廓点作为遍历起始点,并将与所述当前位置点距离小于或等于第一距离阈值的轮廓点作为待剔除点;在所述轮廓上从所述遍历起始点开始,沿所述第一方向的反方向进行轮廓点的遍历,以保留所述待剔除点以外的轮廓点,得到所述虚拟路径上的路径点。
5、在第一方面的一些实施方式中,所述在所述轮廓上从所述遍历起始点开始,沿所述第一方向的反方向进行轮廓点的遍历,以保留所述待剔除点以外的轮廓点,得到所述虚拟路径上的路径点,包括:在所述轮廓的轮廓点中,将与所述沿边行驶路径的起点的距离小于或等于第二距离阈值的轮廓点作为遍历终点;在所述轮廓上从所述遍历起始点开始,沿所述第一方向的反方向进行轮廓点的遍历,以保留所述待剔除点以外的轮廓点,直至遍历到的轮廓点为所述遍历终点时,停止遍历,得到所述虚拟路径上的路径点。
6、在第一方面的一些实施方式中,所述在所述轮廓上从所述遍历起始点开始,沿所述第一方向的反方向进行轮廓点的遍历,以保留所述待剔除点以外的轮廓点,直至遍历到的轮廓点为所述遍历终点时,停止遍历,得到所述虚拟路径上的路径点,包括:在所述轮廓上从所述遍历起始点开始,沿所述第一方向的反方向进行轮廓点的遍历;若当前遍历的轮廓点不属于所述待剔除点,则将该轮廓点添加至目标点集合中,并进行下一个轮廓点的遍历;若当前遍历的轮廓点属于所述待剔除点,则将所述目标点集合中的轮廓点清空,并进行下一个轮廓点的遍历;直至遍历到的轮廓点为所述遍历终点时,停止遍历,将所述目标点集合中的轮廓点作为所述虚拟路径上的路径点。
7、在第一方面的一些实施方式中,所述轮廓为所述膨胀路径的最大轮廓,所述最大轮廓的轮廓线长度在所述膨胀路径各条轮廓线中最长。
8、在第一方面的一些实施方式中,所述控制所述机器人根据所述虚拟路径进行回溯行驶,以在完成回溯行驶后重新进行沿边行驶,包括:控制所述机器人根据所述虚拟路径进行回溯行驶;在所述机器人发生碰撞后确认完成回溯行驶,并从碰撞发生点开始重新进行沿边行驶。
9、本申请实施例第二方面提供的一种机器人的沿边行驶控制装置,包括:沿边行驶路径获取单元,用于在检测到所述机器人沿边行驶过程中出现沿边误闭合的情况下,将所述机器人的当前位置点与所述机器人的沿边行驶路径点连接,得到沿边行驶路径;膨胀单元,用于对所述沿边行驶路径进行膨胀,得到膨胀路径;虚拟路径确定单元,用于在所述膨胀路径的轮廓上确定虚拟路径,所述虚拟路径上的路径点与所述当前位置点的距离大于第一距离阈值;沿边行驶控制单元,用于控制所述机器人根据所述虚拟路径进行回溯行驶,以在完成回溯行驶后重新进行沿边行驶。
10、本申请实施例第三方面提供一种机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述机器人的沿边行驶控制方法的步骤。
11、本申请实施例第四方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述机器人的沿边行驶控制方法的步骤。
12、本申请实施例第五方面提供了一种计算机程序产品,当计算机程序产品在机器人上运行时,使得机器人执行上述机器人的沿边行驶控制方法的步骤。
13、在本申请的实施方式中,通过在检测到机器人沿边行驶过程中出现沿边误闭合的情况下,将机器人的当前位置点与机器人的沿边行驶路径点连接,得到沿边行驶路径,然后,对沿边行驶路径进行膨胀,得到膨胀路径,并在膨胀路径的轮廓上确定虚拟路径,由于路径经过膨胀,且虚拟路径上的路径点与当前位置点的距离大于第一距离阈值,可以使虚拟路径远离沿边误闭合的发生区域,进而在控制机器人根据虚拟路径进行回溯行驶,并在完成回溯行驶后重新进行沿边行驶时,机器人可以从发生沿边误闭合之前的区域重新开始工作,进而完成对沿边误闭合的异常现象的处理,保障沿边行驶的可靠性。
技术特征:
1.一种机器人的沿边行驶控制方法,其特征在于,包括:
2.如权利要求1所述的机器人的沿边行驶控制方法,其特征在于,所述在所述膨胀路径的轮廓上确定虚拟路径,包括:
3.如权利要求2所述的机器人的沿边行驶控制方法,其特征在于,所述机器人沿边行驶时的行驶方向为第一方向;
4.如权利要求3所述的机器人的沿边行驶控制方法,其特征在于,所述在所述轮廓上从所述遍历起始点开始,沿所述第一方向的反方向进行轮廓点的遍历,以保留所述待剔除点以外的轮廓点,得到所述虚拟路径上的路径点,包括:
5.如权利要求4所述的机器人的沿边行驶控制方法,其特征在于,所述在所述轮廓上从所述遍历起始点开始,沿所述第一方向的反方向进行轮廓点的遍历,以保留所述待剔除点以外的轮廓点,直至遍历到的轮廓点为所述遍历终点时,停止遍历,得到所述虚拟路径上的路径点,包括:
6.如权利要求2所述的机器人的沿边行驶控制方法,其特征在于,所述轮廓为所述膨胀路径的最大轮廓,所述最大轮廓的轮廓线长度在所述膨胀路径各条轮廓线中最长。
7.如权利要求1至6任意一项所述的机器人的沿边行驶控制方法,其特征在于,所述控制所述机器人根据所述虚拟路径进行回溯行驶,以在完成回溯行驶后重新进行沿边行驶,包括:
8.一种机器人的沿边行驶控制装置,其特征在于,包括:
9.一种机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述机器人的沿边行驶控制方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述机器人的沿边行驶控制方法的步骤。
技术总结
本申请适用于机器人技术领域,提供了一种机器人的沿边行驶控制方法、装置、机器人和存储介质。其中,所述机器人的沿边行驶控制方法包括:在检测到所述机器人沿边行驶过程中出现沿边误闭合的情况下,将所述机器人的当前位置点与所述机器人的沿边行驶路径点连接,得到沿边行驶路径;对所述沿边行驶路径进行膨胀,得到膨胀路径;在所述膨胀路径的轮廓上确定虚拟路径,所述虚拟路径上的路径点与所述当前位置点的距离大于第一距离阈值;控制所述机器人根据所述虚拟路径进行回溯行驶,以在完成回溯行驶后重新进行沿边行驶。本申请的实施例可以对沿边误闭合的异常现象进行处理,保障沿边行驶的可靠性。
技术研发人员:李蒙,黄祥斌
受保护的技术使用者:深圳市优纪元科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!