一种基于六自由度平台的冗余自由度自动对接控制方法与流程
本发明涉及对接控制,更为具体来说,本发明为一种基于六自由度平台的冗余自由度自动对接控制方法。
背景技术:
1、基于六自由度平台,能够迅速高效地完成六个方向的自由度调整。然而,由于六自由度平台的旋转中心是固定的,因此无法实现绕动态坐标系的旋转。在调整姿态进行对接的过程中,某一方向的调整往往会涉及到其他方向的姿态,因此需要进行复杂的坐标系转换,增加了调整的难度。此外,由于自动对接的需求,六自由度平台在绕固定坐标系旋转时,各个自由度的运动也会受到影响。比如,当x1、y1、z1不为0时,会进一步影响其他方向的位置参数,导致在机构对接过程中经常需要对六个自由度进行调整,从而增加了对接流程的复杂性和时间消耗。另外,由于对接时两个平台相距较远,绕x轴的平移量和旋转量都较大。当某几个方向自由度调节量大时,也会影响到其他几个自由度的调节量。因此,在对接过程中需要进行反复调节,导致对接效率低下并延长了对接时间。
技术实现思路
1、为解决背景技术中存在的技术问题,本发明创新地提供了一种基于六自由度平台的冗余自由度自动对接控制方法,从多自由度冗余设计的角度出发,将绕x轴方向的平移和旋转转移到两自由平台上,六自由度平台只调节除沿x轴平移和绕x轴旋转的其他四个自由度,避免重复调节和无效调节,并提高了对接效率和准确性。
2、为实现上述的技术目的,本发明实施例公开了一种基于六自由度平台的冗余自由度自动对接控制方法,包括以下步骤:
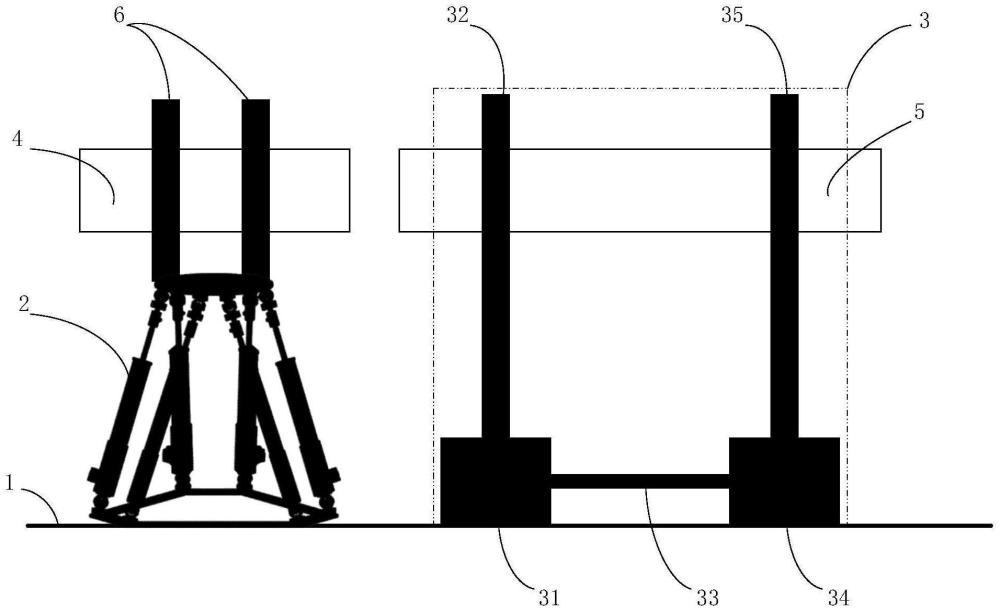
3、搭建对接机构步骤,在同一支撑平台上方配置相对布置的六自由度平台和两自由度平台,所述六自由度平台能够实现沿x轴、y轴和z轴的平移量和旋转量变化,所述两自由度平台可以实现沿x轴的平移量和旋转量变化,将第一对接平台安装在六自由度平台上,将第二对接平台安装在两自由度平台上;
4、对接过程控制步骤,确定动作坐标系,保持六自由度对接平台x轴的平移量和旋转量不变,首先调整六自由度平台y轴和z轴的旋转量,然后调整六自由度平台的y轴和z轴的平移量,接着调整两自由度平台x轴的平移量和/或旋转量,最后通过微调完成第一对接平台和第二对接平台的对接。
5、进一步的,本发明一种基于六自由度平台的冗余自由度自动对接控制方法,其中所述搭建对接机构步骤中,将第一对接平台安装在六自由度平台上时先将六自由度支撑托架固定在六自由度平台上,然后将第一对接平台放置在所述六自由度支撑托架上,由六自由度平台带动六自由度支撑托架和第一对接平台一起动作。
6、进一步的,本发明一种基于六自由度平台的冗余自由度自动对接控制方法,其中将所述六自由度支撑托架设置为两个,且两个所述六自由度支撑托架相对设置,并将第一对接平台架设在两个六自由度支撑托架上。
7、进一步的,本发明一种基于六自由度平台的冗余自由度自动对接控制方法,其中所述搭建对接机构步骤中,将第二对接平台设置为包括两自由度主动滑座和两自由度主动支撑托架,使两自由度主动滑座与设置在支撑平台上滑轨滑动配合,使两自由度主动滑座可以沿x轴方向平移,将两自由度主动支撑托架固定在两自由度主动滑座上,将第二对接平台放置在两自由度主动支撑托架上,由两自由度主动支撑托架自带的旋转机构带动第二对接平台沿x轴旋转。
8、进一步的,本发明一种基于六自由度平台的冗余自由度自动对接控制方法,其中让所述两自由度主动滑座通过连接杆连接两自由度被动滑座,将两自由度主动滑座和两自由度被动滑座设置在支撑平台上设置的同一滑轨上,使两自由度被动滑座跟随两自由度主动滑座沿x轴方向平移,在两自由度被动滑座上固定两自由度被动支撑托架,将第二对接平台的一端架设在两自由度主动支撑托架上,将第二对接平台的另一端架设在两自由度被动支撑托架上,由两自由度主动支撑托架和两自由度被动支撑托架自带的旋转机构同步带动第二对接平台沿x轴旋转。
9、进一步的,本发明一种基于六自由度平台的冗余自由度自动对接控制方法,其中所述对接过程控制步骤中,在确定动作坐标系时,将动作坐标系原点时定位在六自由度平台回至中位后的中心线上,将x轴与第一对接平台的轴线重合,将z轴向上垂直于x轴,将y轴分别垂直于x轴和z轴且方向向里。
10、进一步的,本发明一种基于六自由度平台的冗余自由度自动对接控制方法,其中当六自由度平台调整至四个自由度姿态误差落入设定姿态误差阈值范围内后,执行两自由度平台的调整流程。
11、进一步的,本发明一种基于六自由度平台的冗余自由度自动对接控制方法,其中当第一对接平台和第二对接平台之间的距离为对接微调距离阈值时,执行微调流程,所述微调流程即对六自由度平台y轴和z轴的平移量和旋转量进行微调,在微调流程执行完毕后再次调整两自由度平台x轴的平移量和/或旋转量使第一对接平台与第二对接平台对接。
12、进一步的,本发明一种基于六自由度平台的冗余自由度自动对接控制方法,其中所述对接微调距离阈值设置为5mm。
13、本发明的有益效果为:本发明通过多自由度冗余设计,可以充分发挥六自由度平台的性能,将绕x轴方向的平移和旋转转移到两自由平台上,六自由度平台只调节除沿x轴平移和绕x轴旋转的其他四个自由度。这种设计方式使得各个自由度相互独立,避免了重复调节和无效调节,从而提高了对接效率和准确性。在实际应用中,六自由度平台在调节过程中先调整y轴和z轴的旋转量,之后再调整y轴和z轴的平移量,再调整六自由度平台y轴和z轴的平移量不会影响到y轴和z轴旋转量的大小,使得各个自由度能够相互独立地进行调节。这种设计方式不仅提高了对接的精度和效率,还降低了对接的难度和风险。通过六自由度平台与两自由度平台的组合设计不仅提高了对接效率和准确性,还降低了对接的难度和风险,具有很高的灵活性和适应性。
技术特征:
1.一种基于六自由度平台的冗余自由度自动对接控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于六自由度平台的冗余自由度自动对接控制方法,其特征在于:所述搭建对接机构步骤中,将第一对接平台安装在六自由度平台上时先将六自由度支撑托架固定在六自由度平台上,然后将第一对接平台放置在所述六自由度支撑托架上,由六自由度平台带动六自由度支撑托架和第一对接平台一起动作。
3.根据权利要求2所述的一种基于六自由度平台的冗余自由度自动对接控制方法,其特征在于:将所述六自由度支撑托架设置为两个,且两个所述六自由度支撑托架相对设置,并将第一对接平台架设在两个六自由度支撑托架上。
4.根据权利要求2所述的一种基于六自由度平台的冗余自由度自动对接控制方法,其特征在于:所述搭建对接机构步骤中,将第二对接平台设置为包括两自由度主动滑座和两自由度主动支撑托架,使两自由度主动滑座与设置在支撑平台上滑轨滑动配合,使两自由度主动滑座可以沿x轴方向平移,将两自由度主动支撑托架固定在两自由度主动滑座上,将第二对接平台放置在两自由度主动支撑托架上,由两自由度主动支撑托架自带的旋转机构带动第二对接平台沿x轴旋转。
5.根据权利要求4所述的一种基于六自由度平台的冗余自由度自动对接控制方法,其特征在于:让所述两自由度主动滑座通过连接杆连接两自由度被动滑座,将两自由度主动滑座和两自由度被动滑座设置在支撑平台上设置的同一滑轨上,使两自由度被动滑座跟随两自由度主动滑座沿x轴方向平移,在两自由度被动滑座上固定两自由度被动支撑托架,将第二对接平台的一端架设在两自由度主动支撑托架上,将第二对接平台的另一端架设在两自由度被动支撑托架上,由两自由度主动支撑托架和两自由度被动支撑托架自带的旋转机构同步带动第二对接平台沿x轴旋转。
6.根据权利要求4所述的一种基于六自由度平台的冗余自由度自动对接控制方法,其特征在于:所述对接过程控制步骤中,在确定动作坐标系时,将动作坐标系原点时定位在六自由度平台回至中位后的中心线上,将x轴与第一对接平台的轴线重合,将z轴向上垂直于x轴,将y轴分别垂直于x轴和z轴且方向向里。
7.根据权利要求6所述的一种基于六自由度平台的冗余自由度自动对接控制方法,其特征在于:当六自由度平台调整至四个自由度姿态误差落入设定姿态误差阈值范围内后,执行两自由度平台的调整流程。
8.根据权利要求6所述的一种基于六自由度平台的冗余自由度自动对接控制方法,其特征在于:当第一对接平台和第二对接平台之间的距离为对接微调距离阈值时,执行微调流程,所述微调流程即对六自由度平台y轴和z轴的平移量和旋转量进行微调,在微调流程执行完毕后再次调整两自由度平台x轴的平移量和/或旋转量使第一对接平台与第二对接平台对接。
9.根据权利要求8所述的一种基于六自由度平台的冗余自由度自动对接控制方法,其特征在于:所述对接微调距离阈值设置为5mm。
技术总结
本发明公开了一种基于六自由度平台的冗余自由度自动对接控制方法,包括以下步骤:搭建对接机构步骤:在支撑平台上配置六自由度平台和两自由度平台,两自由度平台可实现X轴平移和旋转变化。将第一对接平台安装在六自由度平台上,第二对接平台安装在两自由度平台上。对接过程控制步骤:确定动作坐标系,保持六自由度平台X轴平移量和旋转量不变,先调整Y轴和Z轴旋转量,再调整Y轴和Z轴平移量,之后调整两自由度平台X轴平移和/或旋转量,最后微调完成对接。本发明将绕X轴方向的平移和旋转转移到两自由平台上,六自由度平台只调节除沿X轴平移和绕X轴旋转的其他四个自由度,避免重复调节和无效调节,并提高了对接效率和准确性。
技术研发人员:杨天奇,李明虎,李相兵
受保护的技术使用者:北京特种机械研究所
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!