一种用于重型汽车自动驾驶失效接管的方法和系统与流程
本发明属于重型汽车自动驾驶,特别涉及一种用于重型汽车自动驾驶失效接管的方法和系统。
背景技术:
1、重型自动驾驶车辆通过安装在车辆上的摄像头、毫米波雷达、激光雷达等环境感知设备感知周围环境和路况,基于计算机系统决策规划运动目标轨迹,通过控制系统控制车辆行使方向、车身姿态和行驶速度,使车辆保持在目标轨迹内。
2、重型自动驾驶车辆实现了无人驾驶,将驾驶员从车辆驾驶舱中解放出来,避免了重复、枯燥的工作,同时也能够避免很多复杂、危险的工作环境,但是重型自动驾驶车辆行驶过程中也会遇到突发状况和异常情况,这些问题如果不能及时准确地解决,就会导致重型自动驾驶车辆行驶中断。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种用于重型汽车自动驾驶失效接管的方法和系统,有效解决重型自动驾驶车辆因异常状况导致车辆行驶中断的问题,并且能够提高驾驶人员的安全与工作效率,提高重型自动驾驶车辆在解决异常过程中的安全。
2、为实现上述目的,本发明采用以下技术方案:
3、一种用于重型汽车自动驾驶失效接管的方法,包括以下步骤:
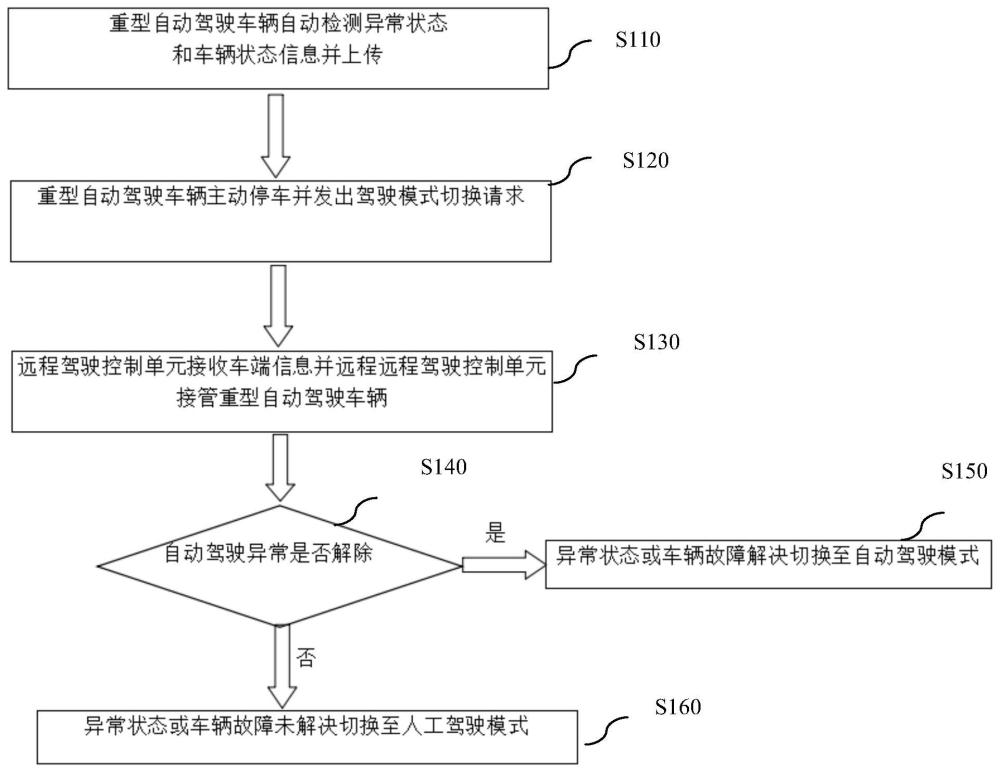
4、监测目标车辆的驾驶状态和获取车辆状态信息,根据车辆的驾驶状态和车辆状态信息在判断目标车辆自动驾驶状态出现异常时,向云端发送切换驾驶模式的请求;云端根据所述切换驾驶模式的请求,将目标车辆的驾驶模式切换为远程驾驶模式;
5、如果在远程驾驶模式下解决了车辆自动驾驶状态的异常,则重新切换回自动驾驶状态;如果无法在远程驾驶模式解决车辆自动驾驶状态的异常,则切换至人工驾驶模式。
6、进一步的,所述根据车辆的驾驶状态和车辆状态信息在判断目标车辆自动驾驶状态出现异常具体包括:在车辆的驾驶状态和车辆状态信息中的任一出现异常时,则目标车辆自动驾驶状态异常。
7、进一步的,其中车辆的驾驶状态异常包括环境异常和车辆本体异常;所述环境异常包括路面出现障碍物、路面损坏和道路堵车;所述车辆本体异常包括车辆传感器故障、无法规划出自动驾驶的路线和控制结果无法收敛。
8、进一步的,所述车辆状态信息包括网络延时数据、油门档位、油量、电压、水温、胎压和实时位置。
9、进一步的,远程驾驶模式下执行驾驶的过程为:远程驾驶控制单元控制重型自动驾驶车辆的方向盘、油门、刹车、灯光和喇叭。
10、进一步的,所述如果在远程驾驶模式下解决了辆自动驾驶状态的异常,则重新切换回自动驾驶状态时,无需停车重新启动,直接从远程驾驶模式切换为自动驾驶模式。
11、进一步的,所述如果无法在远程驾驶模式解决辆自动驾驶状态的异常,则切换至人工驾驶模式,且目标车辆在切换至人工驾驶模式后熄火停车。
12、本发明还提出了一种用于重型汽车自动驾驶失效接管的系统,所述系统包括自动驾驶控制单元、远程驾驶控制单元和云端;且自动驾驶控制单元、远程驾驶控制单元均位于目标车辆驾驶舱内;自动驾驶控制单元和远程驾驶控制单元之间通过can通信连接;所述远程驾驶控制单元通过无线通信网络与云端通信;
13、所述自动驾驶控制单元用于监测目标车辆的驾驶状态和获取车辆状态信息,根据车辆的驾驶状态和车辆状态信息在判断目标车辆自动驾驶状态出现异常时,向云端发送切换驾驶模式的请求;
14、所述云端用于根据所述切换驾驶模式的请求,将目标车辆的驾驶模式切换为远程驾驶模式;
15、所述远程驾驶控制单元用于执行远程驾驶,并根据尝试解决自动驾驶状态的异常;如果在远程驾驶模式下解决了辆自动驾驶状态的异常,则重新切换回自动驾驶状态;如果无法在远程驾驶模式解决辆自动驾驶状态的异常,则切换至人工驾驶模式。
16、进一步的,所述系统还包括显示单元;所述显示单元位于目标车辆驾驶舱内;所述显示单元通过无线通信网络与云端通信连接,用于通过云端获取目标车辆自动驾驶的视频信息,并将所述视频信息解码后输出展示到显示屏上。
17、进一步的,所述自动驾驶控制单元与自动驾驶采集单元通信连接;所述自动驾驶采集单元包括摄像头、激光雷达和毫米波雷达。
18、
技术实现要素:
中提供的效果仅仅是实施例的效果,而不是发明所有的全部效果,上述技术方案中的一个技术方案具有如下优点或有益效果:
19、本发明提出了一种用于重型汽车自动驾驶失效接管的方法和系统,该方法包括以下步骤:监测目标车辆的驾驶状态和获取车辆状态信息,根据车辆的驾驶状态和车辆状态信息在判断目标车辆自动驾驶状态出现异常时,向云端发送切换驾驶模式的请求;云端根据所述切换驾驶模式的请求,将目标车辆的驾驶模式切换为远程驾驶模式;如果在远程驾驶模式下解决了车辆自动驾驶状态的异常,则重新切换回自动驾驶状态;如果无法在远程驾驶模式解决车辆自动驾驶状态的异常,则切换至人工驾驶模式。基于一种用于重型汽车自动驾驶失效接管的方法,还提出了一种用于重型汽车自动驾驶失效接管的系统。本发明有效解决重型自动驾驶车辆因异常状况导致车辆行驶中断的问题,并且能够提高驾驶人员的安全与工作效率,提高重型自动驾驶车辆在解决异常过程中的安全。
20、本发明提出了解决重型自动驾驶车辆出现异常状况或车辆故障后的技术方案,实现了自动驾驶模式、远程驾驶模式、人工驾驶模式之间的相互切换。
技术特征:
1.一种用于重型汽车自动驾驶失效接管的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种用于重型汽车自动驾驶失效接管的方法,其特征在于,所述根据车辆的驾驶状态和车辆状态信息在判断目标车辆自动驾驶状态出现异常具体包括:在车辆的驾驶状态和车辆状态信息中的任一出现异常时,则目标车辆自动驾驶状态异常。
3.根据权利要求2所述的一种用于重型汽车自动驾驶失效接管的方法,其特征在于,其中车辆的驾驶状态异常包括环境异常和车辆本体异常;所述环境异常包括路面出现障碍物、路面损坏和道路堵车;所述车辆本体异常包括车辆传感器故障、无法规划出自动驾驶的路线和控制结果无法收敛。
4.根据权利要求2所述的一种用于重型汽车自动驾驶失效接管的方法,其特征在于,所述车辆状态信息包括网络延时数据、油门档位、油量、电压、水温、胎压和实时位置。
5.根据权利要求1所述的一种用于重型汽车自动驾驶失效接管的方法,其特征在于,远程驾驶模式下执行驾驶的过程为:远程驾驶控制单元控制重型自动驾驶车辆的方向盘、油门、刹车、灯光和喇叭。
6.根据权利要求1所述的一种用于重型汽车自动驾驶失效接管的方法,其特征在于,所述如果在远程驾驶模式下解决了辆自动驾驶状态的异常,则重新切换回自动驾驶状态时,无需停车重新启动,直接从远程驾驶模式切换为自动驾驶模式。
7.根据权利要求1所述的一种用于重型汽车自动驾驶失效接管的方法,其特征在于,所述如果无法在远程驾驶模式解决辆自动驾驶状态的异常,则切换至人工驾驶模式,且目标车辆在切换至人工驾驶模式后熄火停车。
8.一种用于重型汽车自动驾驶失效接管的系统,其特征在于,所述系统包括自动驾驶控制单元、远程驾驶控制单元和云端;且自动驾驶控制单元、远程驾驶控制单元均位于目标车辆驾驶舱内;自动驾驶控制单元和远程驾驶控制单元之间通过can通信连接;所述远程驾驶控制单元通过无线通信网络与云端通信;
9.根据权利要求8所述的一种用于重型汽车自动驾驶失效接管的系统,其特征在于,所述系统还包括显示单元;所述显示单元位于目标车辆驾驶舱内;所述显示单元通过无线通信网络与云端通信连接,用于通过云端获取目标车辆自动驾驶的视频信息,并将所述视频信息解码后输出展示到显示屏上。
10.根据权利要求8所述的一种用于重型汽车自动驾驶失效接管的系统,其特征在于,所述自动驾驶控制单元与自动驾驶采集单元通信连接;所述自动驾驶采集单元包括摄像头、激光雷达和毫米波雷达。
技术总结
本发明提出了一种用于重型汽车自动驾驶失效接管的方法和系统,该方法包括:监测目标车辆的驾驶状态和获取车辆状态信息,根据车辆的驾驶状态和车辆状态信息在判断目标车辆自动驾驶状态出现异常时,向云端发送切换驾驶模式的请求;云端根据切换驾驶模式的请求,将目标车辆的驾驶模式切换为远程驾驶模式;如果在远程驾驶模式下解决了车辆自动驾驶状态的异常,则重新切换回自动驾驶状态;如果无法在远程驾驶模式解决车辆自动驾驶状态的异常,则切换至人工驾驶模式。基于该方法,还提出了一种用于重型汽车自动驾驶失效接管的系统。本发明能够提高驾驶人员的安全与工作效率,提高重型自动驾驶车辆在解决异常过程中的安全。
技术研发人员:郭银,李志杰,田磊,马小琦,赵玉超,杨孟
受保护的技术使用者:中国重汽集团济南动力有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!