智能游船避障速度规划方法、装置、计算机存储介质与流程
本发明涉及无人驾驶,尤其涉及一种智能游船避障速度规划方法、装置、计算机存储介质。
背景技术:
1、近年来,随着智能技术的快速发展,无人驾驶技术在智能游船领域的应用日益广泛。智能游船能够安全、舒适、高效的自主航行是评价智能化的关键指标,而速度规划是其自主航行中一个重要的环节。传统的速度规划往往没有充分考虑游船的动力学和环境约束,并且对动静态障碍物的考虑并不全面,进一步,由于当前技术水平约束,障碍物的感知结果以及未来时刻运行轨迹预测往往与实际偏差较大,此外,相同水域在不同时刻水流方向以及流速往往差别很大,并且该信息通常很难辨识,这就对规划算法提出较大挑战。
2、因此,迫切需要设计一种能够综合考虑游船动力学特性、环境约束不确定以及动静障碍物不确定的情况下的速度规划方法,能够最大限度保证智能游船的行驶安全。
技术实现思路
1、本发明所要解决的技术问题在于提供一种智能游船避障速度规划方法、装置、计算机存储介质,能够在综合考虑游船动力学特性、环境约束不确定性以及动静障碍物不确定性的情况下,进行速度规划,能够最大限度保证智能游船的行驶安全。
2、为解决上述技术问题,本发明采用如下所述的技术方案:
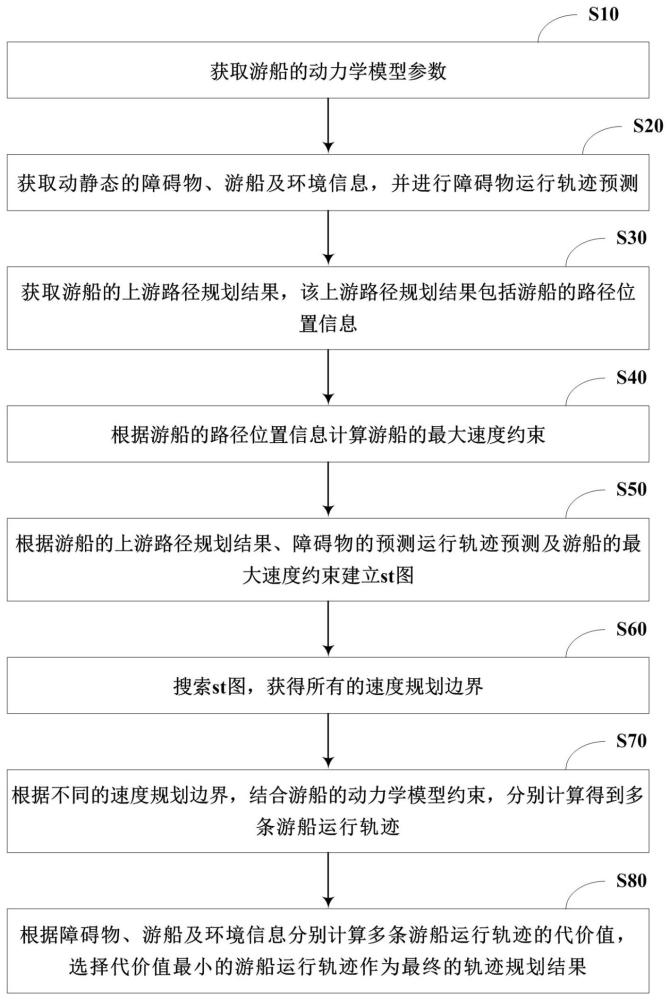
3、一种智能游船避障速度规划方法,其包括如下步骤:获取游船的动力学模型参数;获取动静态的障碍物、游船及环境信息,并进行障碍物运行轨迹预测;获取游船的上游路径规划结果,该上游路径规划结果包括游船的路径位置信息;根据游船的路径位置信息计算游船的最大速度约束;根据游船的上游路径规划结果、障碍物的预测运行轨迹及游船的最大速度约束建立st图;搜索st图,获得所有的速度规划边界;根据不同的速度规划边界,结合游船的动力学模型约束,分别计算得到多条游船运行轨迹;根据障碍物、游船及环境信息分别计算多条游船运行轨迹的代价值,选择代价值最小的游船运行轨迹作为最终的轨迹规划结果。
4、一种智能游船避障速度规划装置,其包括有:第一获取模块,用于获取游船的动力学模型参数;第二获取模块,用于获取动静态的障碍物、游船及环境信息,并进行障碍物运行轨迹预测;第三获取模块,用于获取游船的上游路径规划结果,该上游路径规划结果包括游船的路径位置信息;速度约束计算模块,用于根据游船的路径位置信息计算游船的最大速度约束;st图构建模块,用于根据游船的上游路径规划结果、障碍物的预测运行轨迹及游船的最大速度约束建立st图;st图搜索模块,用于搜索st图,获得所有的速度规划边界;轨迹计算模块,用于根据不同的速度规划边界,结合考虑游船的动力学模型约束,分别计算得到多条游船运行轨迹;轨迹确认模块,用于根据障碍物、游船及环境信息分别计算多条游船运行轨迹的代价值,选择代价值最小的游船运行轨迹作为最终的轨迹规划结果。
5、一种计算机存储介质,其存储有程序指令,所述程序指令被处理器执行时实现上述的智能游船避障速度规划方法。
6、本发明的有益技术效果在于:本发明先根据游船的上游路径规划结果计算游船的最大速度约束,然后根据游船的上游路径规划结果、障碍物的预测运行轨迹及游船的最大速度约束建立st图,再根据搜索st图获得的速度规划边界及游船的动力学模型约束分别计算得到多条游船运行轨迹,最后根据障碍物、游船及环境信息分别计算多条游船运行轨迹的代价值,选择代价值最小的游船运行轨迹作为最终的轨迹规划结果,从而完成游船的速度规划。在速度规划过程中,综合考虑了游船动力学特性、环境约束不确定性以及动静障碍物不确定性的影响,能够最大限度保证智能游船的行驶安全。
技术特征:
1.一种智能游船避障速度规划方法,其特征在于,所述智能游船避障速度规划方法包括如下步骤:
2.如权利要求1所述的智能游船避障速度规划方法,其特征在于,所述步骤s10具体包括:
3.如权利要求1所述的智能游船避障速度规划方法,其特征在于,所述步骤s20具体包括:
4.如权利要求1所述的智能游船避障速度规划方法,其特征在于,所述步骤s40具体包括:
5.如权利要求1所述的智能游船避障速度规划方法,其特征在于,所述步骤s50具体包括:
6.如权利要求5所述的智能游船避障速度规划方法,其特征在于,所述步骤s55具体包括:
7.如权利要求1所述的智能游船避障速度规划方法,其特征在于,所述步骤s60具体包括:采用宽度优先遍历算法对st图进行搜索,获得所有的速度规划边界。
8.如权利要求1所述的智能游船避障速度规划方法,其特征在于,所述步骤s70具体包括:
9.一种智能游船避障速度规划装置,其特征在于,所述智能游船避障速度规划装置包括有:
10.一种计算机存储介质,其特征在于,所述计算机存储介质存储有程序指令,所述程序指令被处理器执行时实现如权利要求1-8任一项所述的智能游船避障速度规划方法。
技术总结
本发明公开了一种智能游船避障速度规划方法、装置、计算机存储介质。本发明先根据游船的上游路径规划结果计算游船的最大速度约束,然后根据游船的上游路径规划结果、障碍物的预测运行轨迹及游船的最大速度约束建立st图,再根据搜索st图获得的速度规划边界及游船的动力学模型约束分别计算得到多条游船运行轨迹,最后根据障碍物、游船及环境信息分别计算多条游船运行轨迹的代价值,选择代价值最小的游船运行轨迹作为最终的轨迹规划结果,从而完成游船的速度规划。在速度规划过程中,综合考虑了游船动力学特性、环境约束不确定性以及动静障碍物不确定性的影响,能够最大限度保证智能游船的行驶安全。
技术研发人员:李伟明,王培栋,程宇威
受保护的技术使用者:陕西欧卡电子智能科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!