基于手动推杆的机器控制方法、装置、设备及介质与流程
本发明实施例涉及机器控制,尤其涉及一种基于手动推杆的机器控制方法、装置、设备及介质。
背景技术:
1、随着工业生产水平的日益提高,重型货物短距离运输变得越来越重要。比如将生产好的货物运输到仓库、停车场的移动充电桩等场景,都需要实现短距离的重物移动。目前工业领域较为常见的运输方式为轨道传输、机器自动寻迹运输等。但轨道和机器寻迹运输前期都需要大范围部署,耗时费力且成本较高,后期同样需要一定的维护成本。
2、相较于上述传统的运输方式,在生活中经常遇到手动推着物品移动的情景。比如超市的手推购物车、机场的手推行李车。这两种手推场景完全依赖人力控制,所以可以达到精准控制,但是可推动的重量也有一定的局限,过重的东西可能无法推动。结合该模式的优缺点,新的手动推杆控制重物移动必将在高负载领域成为一种新型的控制模式。
3、然而,如今的手动推杆模式还处于早期发展阶段,算法系统本身受限于可实施的具体场景,存在操作复杂、手动推杆控制不精准的问题。
技术实现思路
1、本发明实施例提供一种基于手动推杆的机器控制方法、装置、设备及介质,实现了手动推杆对机器的精准控制。
2、第一方面,本发明实施例提供了一种基于手动推杆的机器控制方法,包括:
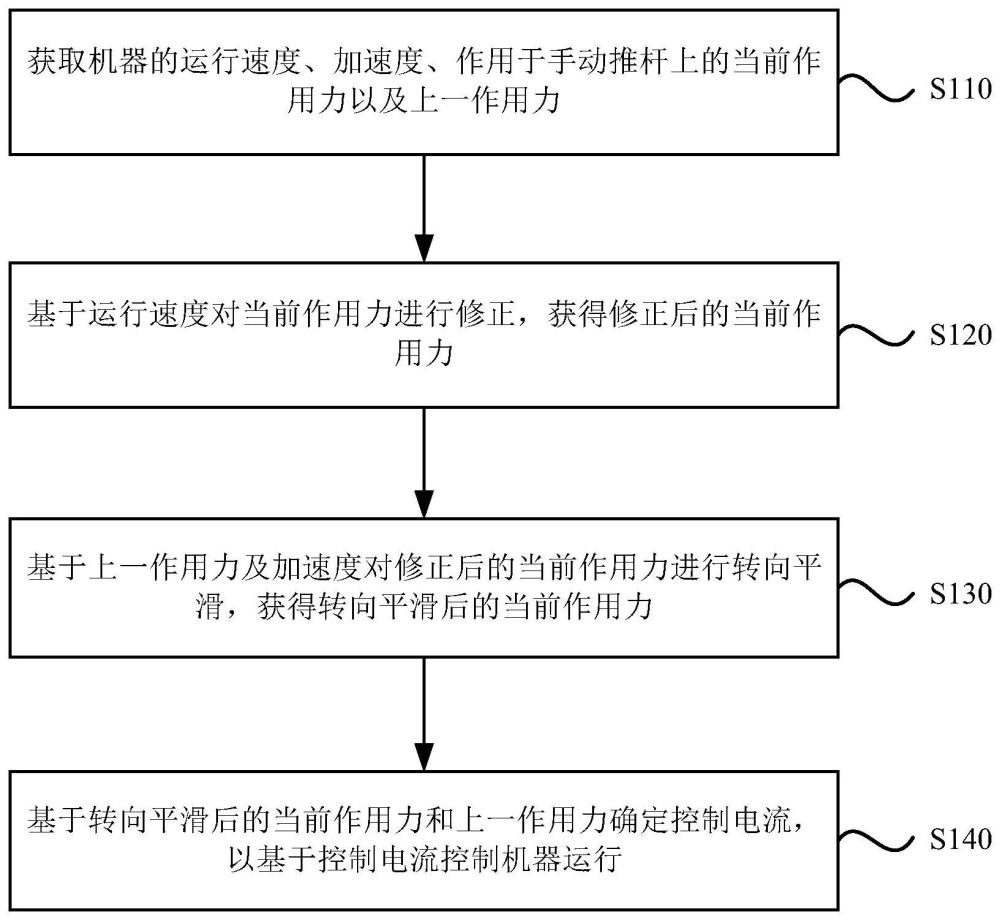
3、获取所述机器的运行速度、加速度、作用于所述手动推杆上的当前作用力以及上一作用力;所述当前作用力包括第一端当前作用力和第二端当前作用力;
4、基于所述运行速度对所述当前作用力进行修正,获得修正后的当前作用力;
5、基于所述上一作用力及所述加速度对修正后的当前作用力进行转向平滑,获得转向平滑后的当前作用力;
6、基于转向平滑后的当前作用力和上一作用力确定控制电流,以基于所述控制电流控制所述机器运行。
7、第二方面,本发明实施例还提供了一种基于手动推杆的机器控制装置,该装置包括:
8、数据获取模块,用于获取所述机器的运行速度、加速度、作用于所述手动推杆上的当前作用力以及上一作用力;所述当前作用力包括第一端当前作用力和第二端当前作用力;
9、作用力修正模块,用于基于所述运行速度对所述当前作用力进行修正,获得修正后的当前作用力;
10、作用力转向平滑模块,用于基于所述上一作用力及所述加速度对修正后的当前作用力进行转向平滑,获得转向平滑后的当前作用力;
11、控制电流确定模块,用于基于转向平滑后的当前作用力和上一作用力确定控制电流,以基于所述控制电流控制所述机器运行。
12、第三方面,本发明实施例还提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明实施例所述的基于手动推杆的机器控制方法。
16、第四方面,本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明实施例所述的基于手动推杆的机器控制方法。
17、本发明实施例公开了一种基于手动推杆的机器控制方法、装置、设备及介质,包括:获取机器的运行速度、加速度、作用于手动推杆上的当前作用力以及上一作用力;当前作用力包括第一端当前作用力和第二端当前作用力;基于运行速度对当前作用力进行修正,获得修正后的当前作用力;基于上一作用力及加速度对修正后的当前作用力进行转向平滑,获得转向平滑后的当前作用力;基于转向平滑后的当前作用力和上一作用力确定控制电流,以基于控制电流控制机器运行。本发明实施例提供的基于手动推杆的机器控制方法,根据运行速度对当前作用力进行修正,通过上一作用力和加速度对修正后的当前作用力进行转向平滑,根据转向平滑后的当前作用力和上一作用力确定控制电流,进而控制机器运行,能够实现手动推杆对机器的精准控制。
技术特征:
1.一种基于手动推杆的机器控制方法,其特征在于,所述手动推杆设置于所述机器上,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,基于所述运行速度对所述当前作用力进行修正,获得修正后的当前作用力,包括:
3.根据权利要求1所述的方法,其特征在于,基于所述上一作用力及所述加速度对修正后的当前作用力进行转向平滑,获得转向平滑后的当前作用力,包括:
4.根据权利要求1所述的方法,其特征在于,基于转向平滑后的当前作用力和上一作用力确定控制电流,包括:
5.根据权利要求4所述的方法,其特征在于,在确定上一作用力与转向平滑后的当前作用力间的差值之后,还包括:
6.根据权利要求1所述的方法,其特征在于,在获取作用于所述手动推杆上的当前作用力之后,还包括:
7.根据权利要求1所述的方法,其特征在于,在获取作用于所述手动推杆上的当前作用力之后,还包括:
8.根据权利要求1所述的方法,其特征在于,在获取作用于所述手动推杆上的当前作用力之后,还包括:
9.一种基于手动推杆的机器控制装置,其特征在于,包括:
10.一种电子设备,其特征在于,所述电子设备包括:
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-8中任一项所述的基于手动推杆的机器控制方法。
技术总结
本发明实施例公开了一种基于手动推杆的机器控制方法、装置、设备及介质。该方法包括:获取所述机器的运行速度、加速度、作用于所述手动推杆上的当前作用力以及上一作用力;所述当前作用力包括第一端当前作用力和第二端当前作用力;基于所述运行速度对所述当前作用力进行修正,获得修正后的当前作用力;基于所述上一作用力及所述加速度对修正后的当前作用力进行转向平滑,获得转向平滑后的当前作用力;基于转向平滑后的当前作用力和上一作用力确定控制电流,以基于所述控制电流控制所述机器运行。实现了手动推杆对机器的精准控制。
技术研发人员:柴煜奇,袁炜锋,王小挺
受保护的技术使用者:上海思岚科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!