一种支持配准失效的实车与其数字孪生车平行试验方法
本发明涉及数字孪生车平行试验领域,特别是涉及一种支持配准失效的实车与其数字孪生车平行试验方法。
背景技术:
1、随着数字孪生技术的快速发展,越来越多的领域开始使用到了数字孪生技术;例如,在无人车辆的研发过程中,通过数字孪生技术将数字孪生车与实车相互关联,实现虚实一体化的试验环境;这样的平行试验系统和方法能够模拟实车在实际工作场景中的行为和性能,提供真实的操作体验和准确的数据反馈;无人特种车辆为履带特种车辆,履带特种车辆在非规格化路面上进行活动,现有测试方法中,并未对此类特种车辆进行适配,且在实车避障测试时,配准模块使用数字孪生车感知到的虚拟感知数据和实车感知到的物理环境信息对实车控制指令进行配准,生成修正控制指令,数字孪生车根据修正控制指令进行行驶;然而,配准模块在某些情况会失效,一旦配准失效,会造成数字孪生车与实车之间的状态产生较大差异。
技术实现思路
1、针对上述技术问题,本发明采用的技术方案为:
2、根据本申请的第一方面,提供了一种支持配准失效的实车与其数字孪生车平行试验方法,所述方法包括以下步骤:
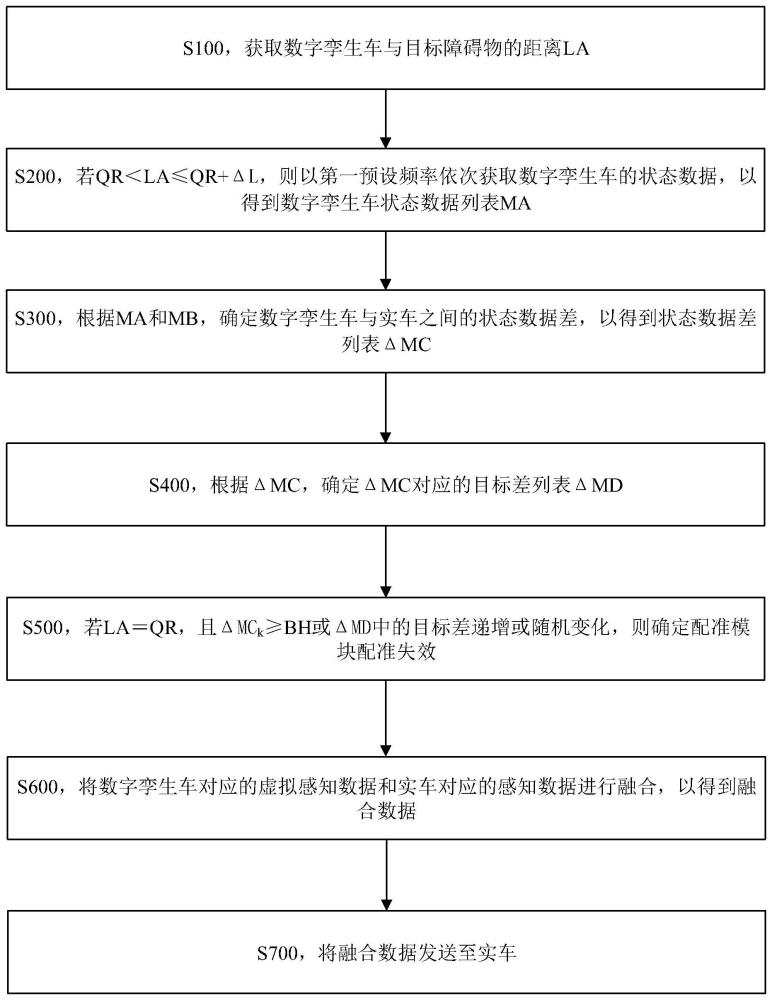
3、s100,获取数字孪生车与目标障碍物的距离la;其中,目标障碍物为虚拟环境中位于数字孪生车前方距离最近的虚拟障碍物;数字孪生车对应有实车,实车能够根据感知到的环境信息生成实车控制指令,数字孪生车根据实车控制指令进行行驶;一辆数字孪生车和一辆实车一一对应。
4、s200,若qr<la≤qr+δl,则以第一预设频率依次获取数字孪生车的状态数据,以得到数字孪生车状态数据列表ma=(ma1,ma2,…,maj,…,mak),j=1,2,…,k;并以第一预设频率依次获取实车的状态数据,以得到实车状态数据列表mb=(mb1,mb2,…,mbj,…,mbk);其中,maj为获取到的数字孪生车的第j个状态数据,mbj为获取到的实车的第j个状态数据;k为获取到的数字孪生车的状态数据的数量;qr为实车的距离传感器的最大检测距离,δl为距离阈值。
5、s300,根据ma和mb,确定数字孪生车与实车对应的状态数据差,以得到状态数据差列表δmc=(δmc1,δmc2,…,δmcj,…,δmck);其中,δmcj为maj和mbj对应的状态数据差;δmcj=|maj-mbj|。
6、s400,根据δmc,确定δmc对应的目标差列表δmd=(δmd1,δmd2,…,δmdr,…,δmdk-1);其中,δmdr为δmcr与δmcr+1对应的目标差;δmdr=δmcr-δmcr+1;r=1,2,…,k-1。
7、s500,若la=qr,且δmck≥bh或δmd中的目标差递增或随机变化,则确定配准模块配准失效;其中,bh为预设的状态数据差阈值。
8、s600,将数字孪生车对应的虚拟感知数据和实车对应的感知数据进行融合,以得到融合数据。
9、s700,将融合数据发送至实车。
10、本发明至少具有以下有益效果:
11、本发明的支持配准失效的实车与其数字孪生车平行试验方法,获取数字孪生车与目标障碍物的距离la,若qr<la≤qr+δl,则以第一预设频率依次获取数字孪生车的状态数据以及实车的状态数据,根据每一时刻获取到的数字孪生车的状态数据和实车的状态数据,确定该时刻对应的数字孪生车与实车对应的状态数据差,能够得到若干状态数据差,以得到状态数据差列表δmc;根据δmc,确定δmc对应的目标差列表δmd;当la=qr时,若δmck≥bh或δmd中的目标差递增或随机变化,则确定配准模块配准失效;此时,将数字孪生车对应的虚拟感知数据和实车对应的感知数据进行融合,以得到融合数据;并将融合数据发送至实车;从而在配准模块配准失效时,实车能够结合虚拟环境信息和物理环境信息进行自主决策,使得数字孪生车与实车保持状态同步。
技术特征:
1.一种支持配准失效的实车与其数字孪生车平行试验方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的支持配准失效的实车与其数字孪生车平行试验方法,其特征在于,在步骤s500之后,所述方法还包括以下步骤:
3.根据权利要求2所述的支持配准失效的实车与其数字孪生车平行试验方法,其特征在于,在步骤s510之后,所述方法还包括以下步骤:
4.根据权利要求2所述的支持配准失效的实车与其数字孪生车平行试验方法,其特征在于,在步骤s510之后,所述方法还包括以下步骤:
5.根据权利要求1所述的支持配准失效的实车与其数字孪生车平行试验方法,其特征在于,所述实车的状态数据包括实车的位置数据、姿态数据和速度数据;姿态数据包括实车辆对应的倾角和车头朝向。
6.根据权利要求1所述的支持配准失效的实车与其数字孪生车平行试验方法,其特征在于,所述实车控制指令包括期望速度和期望曲率。
7.根据权利要求1所述的支持配准失效的实车与其数字孪生车平行试验方法,其特征在于,所述实车包括实车自主决策模块,所述实车自主决策模块用于根据实车对应的状态数据生成实车控制指令。
技术总结
本发明提供了一种支持配准失效的实车与其数字孪生车平行试验方法,涉及数字孪生车平行试验领域,所述方法包括:获取数字孪生车与目标障碍物的距离LA;若QR<LA≤QR+ΔL,获取数字孪生车状态数据列表MA和实车状态数据列表MB;根据MA和MB,确定数字孪生车与实车之间的状态数据差,以得到状态数据差列表ΔMC;根据ΔMC,确定ΔMC对应的目标差列表ΔMD;若LA=QR,ΔMC<subgt;k</subgt;<BH,且ΔMD中的目标差依次递减,则将数字孪生车对应的虚拟感知数据发送至实车;本发明中,在配准模块配准失效时,实车能够结合虚拟环境信息和物理环境信息进行自主决策,使得数字孪生车与实车保持状态同步。
技术研发人员:杨建华,毛乐伟
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!