一种无人艇集群协同建图方法、装置、电子设备及存储介质与流程
本公开涉及协同建图技术以及导航控制技术,尤其是一种无人艇集群协同建图方法、装置、电子设备及存储介质。
背景技术:
1、协同建图导航方法不依赖于gps等外部定位方式,是一种结合点、线特征和显著闭合边界的新颖wr机视觉slam方法,在少、弱纹理等环境中实现精准自主定位,并获得包含精确海面障碍物信息的初始全局地图;海面舰艇利用全局地图规划全局路径,在移动过程中利用激光传感器对初始地图进行更新,并不断重新规划路径,以适应地图中获取的新数据,因此地图是由wr舰艇群共同感知和更新,结合了多种wr舰艇不同视角的优势更好地感知周围环境。
2、与单艇的salm相比,多艇协作完成的salm具有更准确、更高效和更鲁棒的优势。因此受到移动艇领域的不断关注。基于ekf研究了基于全局地图估计的多艇slam问题,由多个艇共同维护全局地图的状态及其协方差矩阵,并利用观测进行全局更新;采用增量极大似然法估计艇位姿,并构造增量地图,同时利用由monte calro方法计算出的艇位姿的后验概率对增量地图进行校正,然后将该方法应用到多艇建图中;但在上述几种方法中,多个艇的运动路径都是事先指定的,艇进入环境后跟踪各自的指定路径运动,完成观测和建图,而在此过程中多个艇之间缺乏充分有效的协调。现有研究中仅有fox基于粒子滤波器研究了结构化环境下的多艇主动slam问题,通过决策理论为多艇规划各自最优的目标点,使所有决策行为的期望增益尽可能大,而期望代价尽可能小。然而其仅考虑了多艇定位的不确定性,而并未对建图的不确定性进行处理。
3、因此,需要一种或多种方法解决上述问题。
4、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开的目的在于提供无人艇集群协同建图方法、装置、电子设备及存储介质,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
2、根据本公开的一个方面,提供无人艇集群协同建图方法,包括:
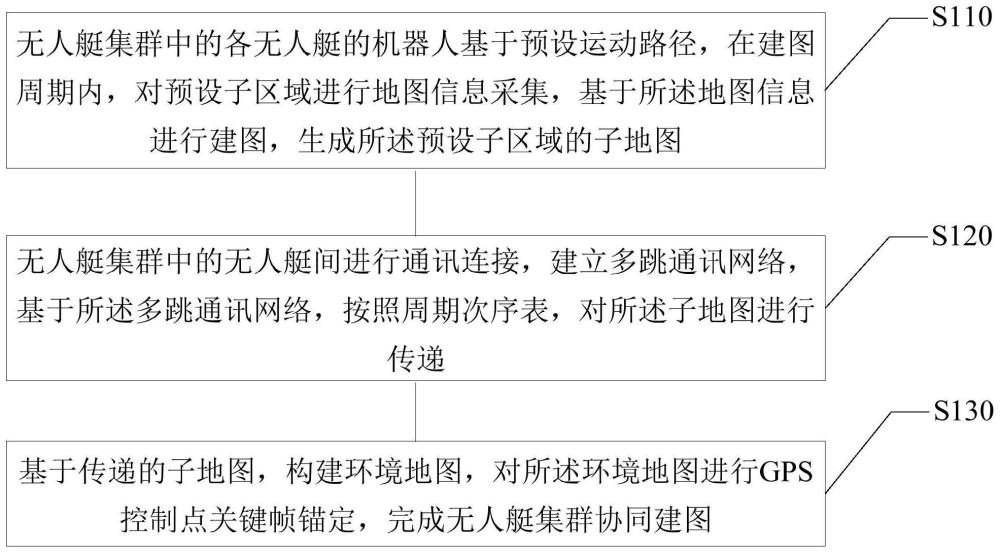
3、无人艇集群中的各无人艇的机器人基于预设运动路径,在建图周期内,对预设子区域进行地图信息采集,基于所述地图信息进行建图,生成所述预设子区域的子地图;
4、无人艇集群中的无人艇间进行通讯连接,建立多条通讯网络,基于所述多条通讯网络,按照周期次序表,对所述子地图进行传递;
5、基于传递的子地图,构建环境地图,对所述环境地图进行gps控制点关键帧锚定,完成无人艇集群协同建图。
6、在本公开的一种示例性实施例中,无人艇集群中的各无人艇基于预设运动路径,在建图周期内,对预设子区域进行地图信息采集,包括:
7、在各无人艇的各建图周期内基于扩展卡尔曼滤波ekf估计所述无人艇的位姿和子地图中路标位置,实现对所述位姿及路标位置的预测、观测、更新。
8、在本公开的一种示例性实施例中,还包括:
9、所述无人艇的机器人对预设子区域进行地图信息采集时,基于占用栅格方法表示预设子区域;
10、基于占用栅格方法,将已探索预设子区域与未探索预设子区域以不同的数值表示,计算所述机器人的预测探索新增栅格数;
11、在当前时刻预测下一时刻所观测到的新增栅格数。
12、在本公开的一种示例性实施例中,所述方法还包括无人艇间进行地图维护:
13、无人艇集群中的各机器人维护接收所述无人艇集群中各机器人在各周期所建的局部子地图、协方差矩阵及最后接收时刻所在周期的次序。
14、在本公开的一种示例性实施例中,所述方法还包括:
15、处于通讯范围内的共享同一地图的不同无人艇在地图融合时,基于建图周期内的增栅格数的增量部分;
16、在无人艇间进行通讯连接时,仅传递增量部分的局部子地图和协方差,以使无人艇间仅对增量子地图进行融合。
17、在本公开的一种示例性实施例中,所述方法还包括:
18、所述无人艇集群中的无人艇间进行通讯连接,建立多条通讯网络,在所述多条通讯网络中,一个无人艇的机器人作为主机器人负责地图融合,其余无人艇的机器人作为从机器人;
19、所述从机器人按照周期次序表,对所述子地图进行传递。
20、在本公开的一种示例性实施例中,还包括:
21、基于传递的子地图,构建环境地图,输出地图工作空间文件;
22、使用带有旋转云台、激光雷达、差分gps的控制点采集设备采集环境点云与精确的gps坐标;
23、基于所述环境点云与精确的gps坐标对所述地图工作空间文件进行gps控制点关键帧锚定,完成无人艇集群协同建图。
24、在本公开的一个方面,提供无人艇集群协同建图装置,包括:
25、子地图采集模块,用于无人艇集群中的各无人艇的机器人基于预设运动路径,在建图周期内,对预设子区域进行地图信息采集,基于所述地图信息进行建图,生成所述预设子区域的子地图;
26、子地图传递模块,用于无人艇集群中的无人艇间进行通讯连接,建立多条通讯网络,基于所述多条通讯网络,按照周期次序表,对所述子地图进行传递;
27、协同建图模块,用于基于传递的子地图,构建环境地图,对所述环境地图进行gps控制点关键帧锚定,完成无人艇集群协同建图。
28、在本公开的一个方面,提供一种电子设备,包括:
29、处理器;以及
30、存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时实现根据上述任意一项所述的方法。
31、在本公开的一个方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现根据上述任意一项所述的方法。
32、基于本公开实施例,无人艇集群中的各无人艇的机器人基于预设运动路径,在建图周期内,对预设子区域进行地图信息采集,基于所述地图信息进行建图,生成所述预设子区域的子地图;无人艇集群中的无人艇间进行通讯连接,建立多条通讯网络,基于所述多条通讯网络,按照周期次序表,对所述子地图进行传递;基于传递的子地图,构建环境地图,对所述环境地图进行gps控制点关键帧锚定,完成无人艇集群协同建图。本公开实施例实现了无人艇集群中的各无人艇的机器人基于预设运动路径分别构建子地图后融合为环境地图的方案,大幅提高了建图效率和准确性。
33、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
34、下面通过附图和实施例,对本公开的技术方案做进一步的详细描述。
技术特征:
1.一种无人艇集群协同建图方法,其特征在于,包括:
2.根据权利要求1所述的无人艇集群协同建图方法,其特征在于,无人艇集群中的各无人艇基于预设运动路径,在建图周期内,对预设子区域进行地图信息采集,包括:
3.根据权利要求2所述的无人艇集群协同建图方法,其特征在于,还包括:
4.根据权利要求3所述的无人艇集群协同建图方法,其特征在于,所述方法还包括无人艇间进行地图维护:
5.根据权利要求4所述的无人艇集群协同建图方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的无人艇集群协同建图方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的无人艇集群协同建图方法,其特征在于,还包括:
8.一种无人艇集群协同建图装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序指令,其特征在于,该计算机程序指令被处理器执行时,实现上述权利要求1-7中任一所述的方法。
技术总结
本发明公开了一种无人艇集群协同建图方法、装置、电子设备及存储介质,其中,方法包括:无人艇集群中的各无人艇的机器人基于预设运动路径,在建图周期内,对预设子区域进行地图信息采集,基于所述地图信息进行建图,生成所述预设子区域的子地图;无人艇集群中的无人艇间进行通讯连接,建立多条通讯网络,基于所述多条通讯网络,按照周期次序表,对所述子地图进行传递;基于传递的子地图,构建环境地图,对所述环境地图进行GPS控制点关键帧锚定,完成无人艇集群协同建图。本公开实施例实现了无人艇集群中的各无人艇的机器人基于预设运动路径分别构建子地图后融合为环境地图的方案,大幅提高了建图效率和准确性。
技术研发人员:董钉,董洁琳,韩玮,吴焱,吴建瑜,苏科伟,杨远鹏,曾江峰,李哲,胥凤驰,刘如磊
受保护的技术使用者:中国船舶集团有限公司系统工程研究院
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!