一种基于MCU+FPGA架构的两栖车控制器的制作方法
本技术涉及两栖车,尤其涉及一种基于mcu+fpga架构的两栖车控制器。
背景技术:
1、两栖车是结合了车与船的双重性能,既可像汽车一样在陆地上行驶穿梭,又可像船一样在水上泛水浮渡的特种车辆。由于其具备卓越的水陆通行性能,可从行进中渡越江河湖海而不受桥或船的限制,因而在交通运输上,具有其特殊的历史意义。多用于军事,救灾救难,探测等专业领域,后经开发改造用于旅游。现有技术中,两栖车控制器大多有成本偏高,能效比较低,功耗较高的缺点。
技术实现思路
1、本实用新型旨在解决现有技术的不足,而提供一种基于mcu+fpga架构的两栖车控制器。
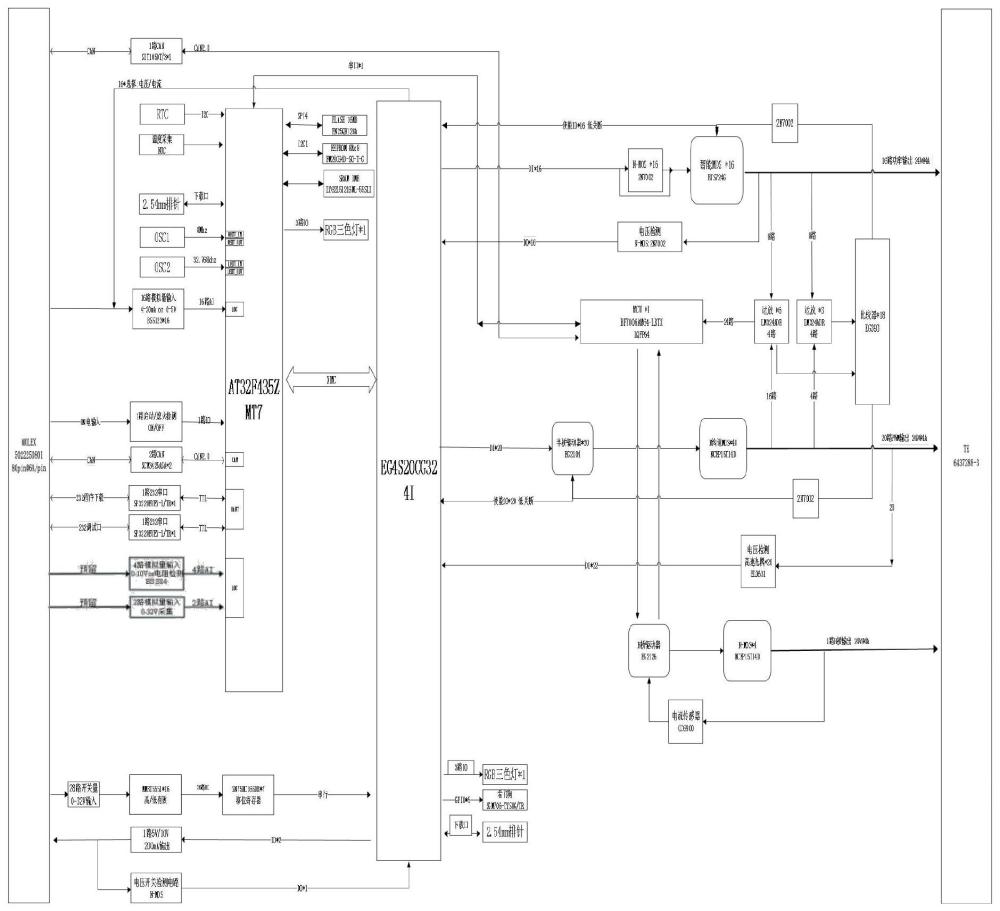
2、本实用新型为实现上述目的,采用以下技术方案:一种基于mcu+fpga架构的两栖车控制器,包括电源、核心板和输出板,输出板与核心板通过牛角扣连接器压接软排线连接;核心板主控单元采用mcu与fpga实现,mcu与fpga通过xmc总线进行数据交互。
3、进一步的,所述fpga,包括local bus模块,gpio模块、看门狗模块、pwm模块、led模块、开关量输入模块以及中断模块,local bus模块将外部并行总线转换为内部的localbus总线。
4、进一步的,所述核心板,包括控制器开关输入,模拟量输入,温度采集以及can接口。
5、进一步的,所述输出板,包括do功率输出部分,pwm输出部分,h桥输出部分,输出端电流采集,电压输出检测以及can通信接口。
6、进一步的,所述电源,包括核心器件和pwm输出供电。
7、进一步的,所述do功率输出部分,包括mos开关控制与输出状态采集。
8、进一步的,所述pwm输出部分,包括控制电路与采集电路,控制电路由一个半桥驱动器控制两个n-mos达到pwm输出。
9、进一步的,所述h桥输出部分使用h桥控制器与四个n-mos实现电机正反转控制,h桥控制器由mcu芯片输出4路高低信号来控制四个n-mos,一个信号线控制一个n-mos。
10、本实用新型的有益效果是:本实用新型采用低成本、高集成度设计方案,满足系统低功耗的要求,具备较高的能效比优势,为工业自动化、电机控制、物联网及消费性电子等各种高运算、大存储需求的设计提供了最佳选择。
技术特征:
1.一种基于mcu+fpga架构的两栖车控制器,其特征在于,包括电源、核心板和输出板,输出板与核心板通过牛角扣连接器压接软排线连接;核心板主控单元采用mcu与fpga实现,mcu与fpga通过xmc总线进行数据交互。
2.根据权利要求1所述的一种基于mcu+fpga架构的两栖车控制器,其特征在于,所述fpga,包括local bus模块,gpio模块、看门狗模块、pwm模块、led模块、开关量输入模块以及中断模块,local bus模块将外部并行总线转换为内部的local bus总线。
3.根据权利要求2所述的一种基于mcu+fpga架构的两栖车控制器,其特征在于,所述核心板,包括控制器开关输入,模拟量输入,温度采集以及can接口。
4.根据权利要求3所述的一种基于mcu+fpga架构的两栖车控制器,其特征在于,所述输出板,包括do功率输出部分,pwm输出部分,h桥输出部分,输出端电流采集,电压输出检测以及can通信接口。
5.根据权利要求4所述的一种基于mcu+fpga架构的两栖车控制器,其特征在于,所述电源,包括核心器件和pwm输出供电。
6.根据权利要求5所述的一种基于mcu+fpga架构的两栖车控制器,其特征在于,所述do功率输出部分,包括mos开关控制与输出状态采集。
7.根据权利要求6所述的一种基于mcu+fpga架构的两栖车控制器,其特征在于,所述pwm输出部分,包括控制电路与采集电路,控制电路由一个半桥驱动器控制两个n-mos达到pwm输出。
8.根据权利要求7所述的一种基于mcu+fpga架构的两栖车控制器,其特征在于,所述h桥输出部分使用h桥控制器与四个n-mos实现电机正反转控制,h桥控制器由mcu芯片输出4路高低信号来控制四个n-mos,一个信号线控制一个n-mos。
技术总结
本技术是一种基于MCU+FPGA架构的两栖车控制器,包括电源、核心板和输出板,输出板与核心板通过牛角扣连接器压接软排线连接;核心板主控单元采用MCU与FPGA实现,MCU与FPGA通过XMC总线进行数据交互。本技术采用低成本、高集成度设计方案,满足系统低功耗的要求,具备较高的能效比优势,为工业自动化、电机控制、物联网及消费性电子等各种高运算、大存储需求的设计提供了最佳选择。
技术研发人员:关腾腾,刘兵,顾明羽
受保护的技术使用者:天津新松智能科技有限公司
技术研发日:20230906
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!