基于热源感应的机器人控制电路
本技术涉及机器人控制,具体地说,涉及基于热源感应的机器人控制电路。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,可分为服务机器人、水下机器人、娱乐机器人、军用机器人、农业机器人等,通过合理运用机器人能够提高生产效率,减少劳动力成本。
2、现有的服务机器人中,如售票机器人通过其设置的触摸显示屏与用户进行互动,用户通过操作触摸显示屏控制服务机器人进行相应动作,由于长时间的亮屏会减少触摸显示屏的寿命,且较为耗电,因此将触摸显示屏设置为在一定时间内未有操作就会自动熄屏,这使得用户在使用服务机器人之前需要唤醒触摸显示屏,或操作间隔时间较长导致触摸显示屏熄灭,需要重新点亮屏幕的问题,使用较为不便。
3、如cn206775801u中涉及一种玩具机器人热释感应及光感应的控制系统,包括:照明灯,照明灯连接有热释感应及光感应控制系统,热释感应及光感应控制系统包括有:环境亮度传感器,用于检测外部环境光照强度;热释传感器,用于检测范围内是否有人体进入;微处理模块,用于接收传感器数据进行运算并产生操作控制信号;环境亮度传感器、热释传感器分别与微处理模块连接,照明灯与微处理模块连接,该实用新型通过热释感应及光感应控制,可以实现对玩具上灯具或者其他灯具的自动控制,通过对环境光照强度以及灯具周围是否有人结合来对灯具进行开关控制以及亮度调节,但将其热释感应部分应用于售票机器人时,存在着当用户离开其热释传感器感应范围时,机器人的显示屏会立即断电关闭,在有多个用户取票时,机器人会重复通断电开关机,影响用户的取票体验。
4、为了能够自动点亮屏幕,且在用户使用时保持屏幕点亮,提出基于热源感应的机器人控制电路。
技术实现思路
1、本实用新型的目的在于提供基于热源感应的机器人控制电路,以解决上述背景技术中提出的问题。
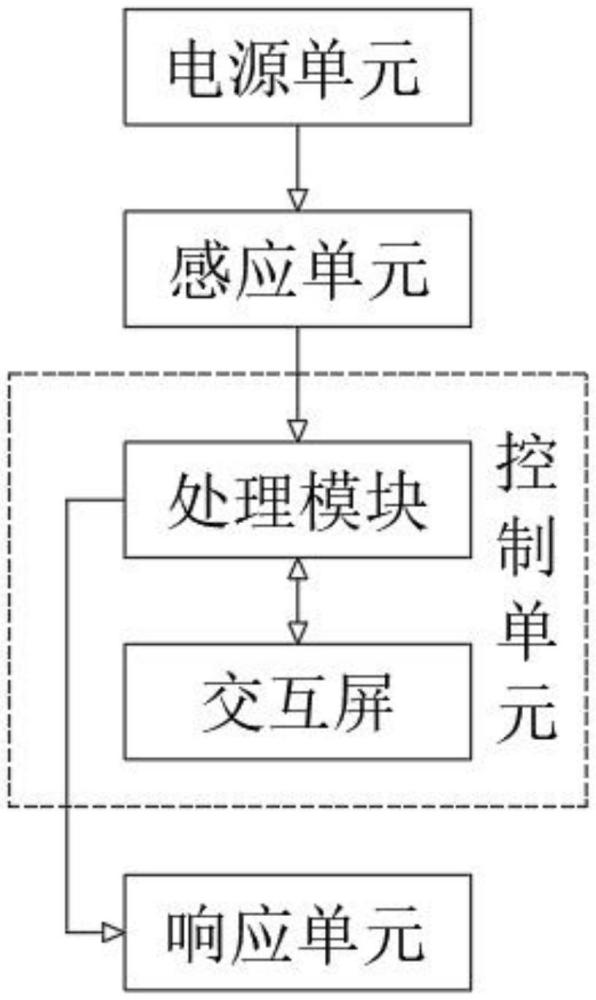
2、为实现上述目的,本实用新型提供基于热源感应的机器人控制电路,包括电源单元、感应单元、控制单元和响应单元,所述控制单元包括交互屏和处理模块,所述电源单元连接所述感应单元,所述感应单元连接所述处理模块,所述处理模块与所述交互屏双向连接,所述处理模块连接所述响应单元;
3、所述电源单元为所述感应单元供电,所述感应单元感应到用户热源后,接通所述处理模块,所述处理模块点亮所述交互屏并根据用户对所述交互屏的操作,通过所述响应单元对用户进行回应。
4、作为本技术方案的进一步改进,所述电源单元包括集成稳压器u1,
5、所述集成稳压器u1接电容c1、c2、c3、c5、c6、电阻r1、二极管d2、d3、电位器rp1并接整流桥bg,所述集成稳压器u1并联有二极管d1;
6、所述整流桥bg接变压器t,所述变压器t接220v市电;
7、所述二极管d3接二极管d5,所述二极管d5接蓄电池bt,所述蓄电池bt接所述电容c1另一端、c2另一端、c3另一端、c5另一端、c6另一端、所述电位器rp1另一端并接电容c4,所述电容c4接所述电阻r1、所述二极管d2另一端。
8、作为本技术方案的进一步改进,所述电源单元还包括二极管d4,所述二极管d4接所述二极管d3,所述二极管d5接所述二极管d4另一端。
9、作为本技术方案的进一步改进,所述感应单元包括芯片u2,
10、所述芯片u2的2脚接二极管d7,所述二极管d7接三极管q1基极,所述三极管q1集电极接电阻r2、r5并接电容c11,所述三极管q1发射极接二极管d8;
11、所述芯片u2的3脚接电容c12、二极管d6并接所述电阻r2另一端;
12、所述芯片u2的4脚接热释电红外传感器pir,所述热释电红外传感器pir接所述芯片u2的5脚;
13、所述芯片u2的6脚接电阻r3、电容c13、c14、三极管q2发射极、二极管d9、所述二极管d6另一端、所述电容c11另一端、所述电容c12另一端并接所述电源单元;
14、所述电阻r3接所述二极管d8另一端、所述电容c13另一端并接电容r4,所述电阻r4接所述三极管q2基极,所述三极管q2集电极接三极管q3基极,所述三极管q3集电极接所述电阻r5另一端,所述三极管q3发射极接所述电容c14另一端并接所述二极管d9,所述二极管d9接所述处理模块。
15、作为本技术方案的进一步改进,所述热释电红外传感器pir并联有电位器rp2。
16、与现有技术相比,本实用新型的有益效果:
17、该基于热源感应的机器人控制电路中,当用户靠近机器人后,感应单元的热释电红外传感器pir检测感应到人体红外热源后,电路导通二极管d9为处理模块供电,处理模块上电启动点亮交互屏,当用户离开后经延迟一定时间,二极管d9截止,停止向处理模块供电。
技术特征:
1.基于热源感应的机器人控制电路,其特征在于:包括电源单元、感应单元、控制单元和响应单元,所述控制单元包括交互屏和处理模块,所述电源单元连接所述感应单元,所述感应单元连接所述处理模块,所述处理模块与所述交互屏双向连接,所述处理模块连接所述响应单元;
2.根据权利要求1所述的基于热源感应的机器人控制电路,其特征在于:所述电源单元包括集成稳压器u1,
3.根据权利要求2所述的基于热源感应的机器人控制电路,其特征在于:所述电源单元还包括二极管d4,所述二极管d4接所述二极管d3,所述二极管d5接所述二极管d4另一端。
4.根据权利要求2所述的基于热源感应的机器人控制电路,其特征在于:所述感应单元包括芯片u2,
5.根据权利要求4所述的基于热源感应的机器人控制电路,其特征在于:所述热释电红外传感器pir并联有电位器rp2。
技术总结
本技术涉及机器人控制技术领域,具体地说,涉及基于热源感应的机器人控制电路,包括电源单元、感应单元、控制单元和响应单元,控制单元包括交互屏和处理模块,电源单元连接感应单元,感应单元连接处理模块,处理模块与交互屏双向连接,处理模块连接响应单元。本技术中,当用户靠近机器人后,感应单元的热释电红外传感器PIR检测感应到人体红外热源后,电路导通二极管D9为处理模块供电,处理模块上电启动点亮交互屏,当用户离开后经延迟一定时间,二极管D9截止,停止向处理模块供电。
技术研发人员:王小禹,丁子玥,陈雪,仇飞
受保护的技术使用者:南京晓庄学院
技术研发日:20230912
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!