一种欠驱动桥式吊车的严格安全模型预测控制方法及系统与流程
本发明涉及吊装系统运输领域,尤其涉及一种欠驱动桥式吊车的严格安全模型预测控制方法及系统。
背景技术:
1、桥式吊车是港口码头最常见的设备之一,在实际工程中,桥式吊车的负载摆角必须被限制在一个可接受的范围内来保证作业过程的安全性,同时小车准确地到达指定位置。此外,桥式吊车的负载有可能会受到强风干扰的影响,这会对其作业的安全性造成一定的威胁。
2、因此有必要提供一种欠驱动桥式吊车的严格安全模型预测控制方法及系统以解决上述问题。
技术实现思路
1、本发明所要解决的技术问题是提供一种欠驱动桥式吊车的严格安全模型预测控制方法及系统,欠驱动桥式吊车系统的负载受到外力扰动时能够通过调整小车的位置来将负载的摆角限制在安全范围内,外力扰动消失时小车会自动回到期望的位置。
2、本发明为解决上述技术问题而采用的技术方案是提供一种欠驱动桥式吊车的严格安全模型预测控制方法,包括如下步骤:
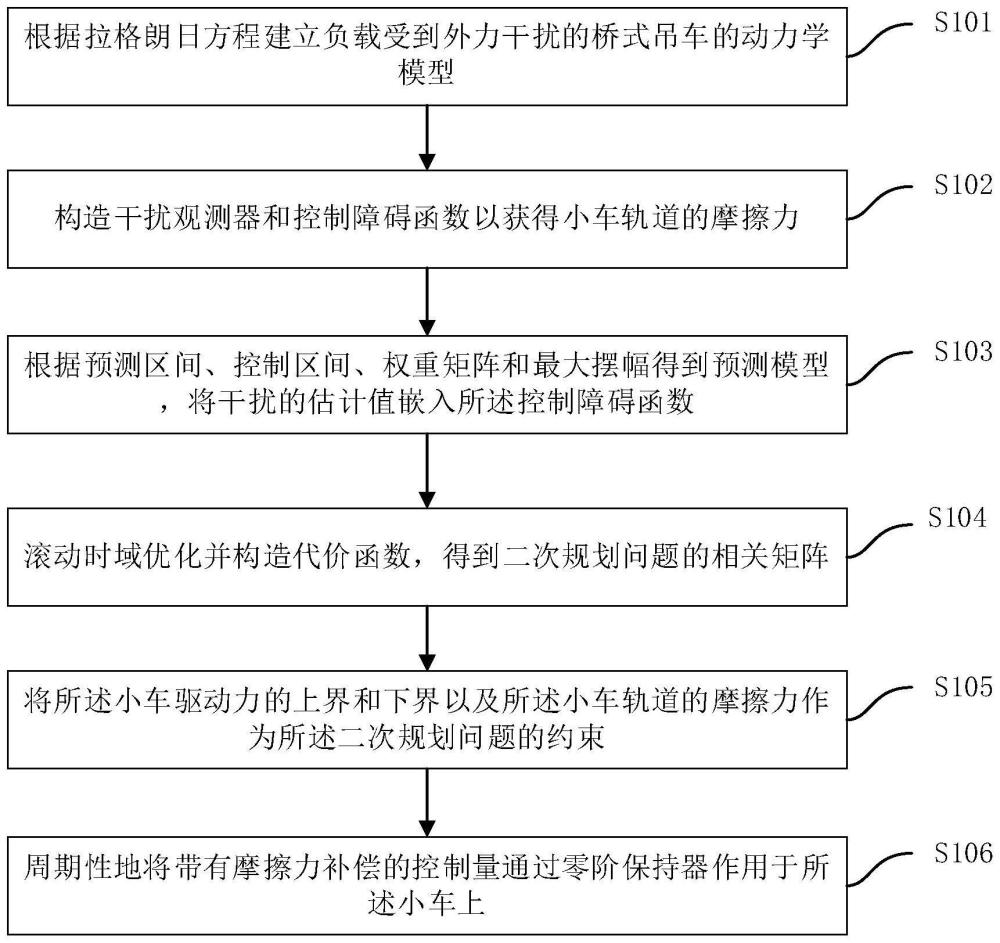
3、根据拉格朗日方程建立负载受到外力干扰的桥式吊车的动力学模型;
4、构造干扰观测器和控制障碍函数以获得小车轨道的摩擦力;
5、根据预测区间、控制区间、权重矩阵和最大摆幅得到预测模型,将干扰的估计值嵌入所述控制障碍函数;
6、滚动时域优化并构造代价函数,得到二次规划问题的相关矩阵;
7、将所述小车驱动力的上界和下界以及所述小车轨道的摩擦力作为所述二次规划问题的约束;
8、周期性地将带有摩擦力补偿的控制量通过零阶保持器作用于所述小车上。
9、优选地,所述根据拉格朗日方程建立负载受到外力干扰的桥式吊车的动力学模型具体如下:
10、
11、其中,m为小车的质量,m为负载的质量,x为小车位移,l为绳长,θ是负载摆角,f为作用于小车的合力,fd为作用于负载的干扰外力,g为重力加速度。
12、优选地,取状态变量为小车位移x、负载摆角θ,定义u(t)=f(t),建立以下状态方程:
13、
14、其中:
15、
16、α(t)为系统状态,u(t)为控制量,d(t)为干扰向量,y(t)为测量输出。
17、优选地,所述干扰向量d(t)满足其中,t为采样周期,ξ为一个正常数,为非负数集合;
18、对所述状态方程从tk到tk+1进行积分,得到积分后的状态方程:
19、
20、其中,ap=eat
21、所述干扰观测器构造如下:
22、
23、其中,为辅助变量,为所述干扰观测器的增益。
24、优选地,定义对微分如下:
25、
26、其中,
27、
28、对tk到tk+1进行积分,得到:
29、
30、
31、当θ(tk)>0时,对θ(tk)上界的所述控制障碍函数设计为:
32、
33、γ1,γ2为0到1区间内的常数,θmax为所述负载摆角的最大幅值;
34、当θ(tk)<0时,对θ(tk)下界的所述控制障碍函数设计为:
35、
36、δ1,δ2为0到1区间内的常数,θmax为所述负载摆角的最大幅值。
37、优选地,用估计值代替d(tk),得到以下公式:
38、
39、定义np和nc分别为所述预测区间和所述控制区间,其中nc<np,假设u(nc-1|tk)=u(nc|tk)=…=u(np-1|tk),其中u(i|tk),i=1,2,...,np-1为在tk时刻对未来第i个采样时刻的预测控制量,得到以下第一预测模型:
40、
41、其中,
42、
43、
44、
45、优选地,对所述第一预测模型进行第一滚动时域优化:
46、定义参考输出序列为yr=crαr,其中xr是期望的小车位置;
47、设计第一参考控制序列如下:
48、
49、设计第一代价函数如下:
50、
51、
52、将所述第一参考控制序列公式带入所述第一代价函数,得到以下公式:
53、
54、其中,
55、优选地,假设所述干扰向量为常向量,得到以下公式:
56、
57、
58、定义δα(tk)=α(tk)-α(tk-1),△u(tk)=u(tk)-u(tk-1),得到以下公式:
59、
60、其中,ce=[04×4 i4];
61、设置u(nc-1|tk)=u(nc|tk)…=u(np-1|tk),得到以下第二预测模型:
62、y=γexe(tk)+φe△u,
63、其中,
64、
65、优选地,对所述第二预测模型进行第二滚动时域优化:
66、设计第二代价函数如下:
67、
68、将y=γexe(tk)+φeδu带入所述第二代价函数,得到以下公式:
69、
70、
71、其中,
72、本发明为解决上述技术问题而采用的技术方案是还提供一种欠驱动桥式吊车的严格安全模型预测控制系统,包括:服务器,所述服务器包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述欠驱动桥式吊车的严格安全模型预测控制方法。
73、本发明对比现有技术有如下的有益效果:本发明提供的一种欠驱动桥式吊车的严格安全模型预测控制方法及系统,根据拉格朗日方程建立负载受到外力干扰的桥式吊车的动力学模型;构造干扰观测器和控制障碍函数以获得小车轨道的摩擦力;根据预测区间、控制区间、权重矩阵和最大摆幅得到预测模型,将干扰的估计值嵌入所述控制障碍函数;滚动时域优化并构造代价函数,得到二次规划问题的相关矩阵;将所述小车驱动力的上界和下界以及所述小车轨道的摩擦力作为所述二次规划问题的约束;周期性地将带有摩擦力补偿的控制量通过零阶保持器作用于所述小车上,欠驱动桥式吊车系统的负载受到外力扰动时能够通过调整小车的位置来将负载的摆角限制在安全范围内,外力扰动消失时小车会自动回到期望的位置。
技术特征:
1.一种欠驱动桥式吊车的严格安全模型预测控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的欠驱动桥式吊车的严格安全模型预测控制方法,其特征在于,所述根据拉格朗日方程建立负载受到外力干扰的桥式吊车的动力学模型具体如下:
3.根据权利要求2所述的欠驱动桥式吊车的严格安全模型预测控制方法,其特征在于,取状态变量为小车位移x、负载摆角θ,定义u(t)=f(t),建立以下状态方程:
4.根据权利要求3所述的欠驱动桥式吊车的严格安全模型预测控制方法,其特征在于,所述干扰向量d(t)满足其中,t为采样周期,为一个正常数,为非负数集合;
5.根据权利要求2所述的欠驱动桥式吊车的严格安全模型预测控制方法,其特征在于,定义对微分如下:
6.根据权利要求4所述的欠驱动桥式吊车的严格安全模型预测控制方法,其特征在于,用估计值代替d(tk),得到以下公式:
7.根据权利要求6所述的欠驱动桥式吊车的严格安全模型预测控制方法,其特征在于,对所述第一预测模型进行第一滚动时域优化:
8.根据权利要求4所述的欠驱动桥式吊车的严格安全模型预测控制方法,其特征在于,假设所述干扰向量为常向量,得到以下公式:
9.根据权利要求8所述的欠驱动桥式吊车的严格安全模型预测控制方法,其特征在于,对所述第二预测模型进行第二滚动时域优化:
10.一种欠驱动桥式吊车的严格安全模型预测控制系统,其特征在于,包括:服务器,所述服务器包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现权利要求1-9任一项所述的方法。
技术总结
本发明公开了一种欠驱动桥式吊车的严格安全模型预测控制方法及系统,包括:根据拉格朗日方程建立负载受到外力干扰的桥式吊车的动力学模型;构造干扰观测器和控制障碍函数以获得小车轨道的摩擦力;根据预测区间、控制区间、权重矩阵和最大摆幅得到预测模型,将干扰的估计值嵌入所述控制障碍函数;滚动时域优化并构造代价函数,得到二次规划问题的相关矩阵;将小车驱动力的上界和下界以及小车轨道的摩擦力作为二次规划问题的约束;周期性地将带有摩擦力补偿的控制量通过零阶保持器作用于小车上。本发明提供的控制方法及系统,在欠驱动桥式吊车系统的负载受到外力扰动时,能够通过调整小车的位置来将负载的摆角限制在安全范围内。
技术研发人员:王江同,陈环,洪俊明
受保护的技术使用者:上海驭矩信息科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!