一种多目标跟踪迭代学习方法
本发明涉及迭代学习跟踪控制,特别是关于一种多目标跟踪迭代学习方法。
背景技术:
1、在现实的工业生产过程中,大部分过程都是在有限的时间间隔内执行给定的生产任务,一次生产一批,这样的过程称之为批生产。批生产有着时间有限与重复执行的特性,迭代学习控制是通过学习历史批次的信息改善当前批次的跟踪性能,随着迭代批次的增加,系统的跟踪误差实现渐进收敛。
2、在批生产的过程中,通常涉及到多目标跟踪。例如,在化工生产中,需要通过多传感器系统来监测温度、压强或体积。每个传感器的输出都有独立的跟踪轨迹。为了表征生产系统生产的整体状况的跟踪结果,可以利用各个传感器的跟踪误差作加权处理。
3、然而,本申请的发明人在研究中发现,在对各个传感器的跟踪误差作加权处理时,需要设置各个传感器的权重,现有技术的权重设置方式为人为预先设置一个权重,例如取相等的数值,这些取值相等(或不等)的权重,虽然可以满足迭代到收敛的条件,但不能保证多传感器的跟踪性能在每次更新后都得到改进。
技术实现思路
1、针对上述问题,本申请的目的是提供一种多目标跟踪迭代学习方法,能够在两阶段的迭代更新中,自适应地确定pareto最优解下的各个传感器的权重,基于这些确定的权重进行批生产的迭代控制,不仅能够满足收敛,还能保证多传感器的跟踪性能在每次迭代后都得到pareto改进。
2、为实现上述目的,本申请采取以下技术方案:
3、第一方面,本申请提供一种多目标跟踪迭代学习方法,所述方法包括:
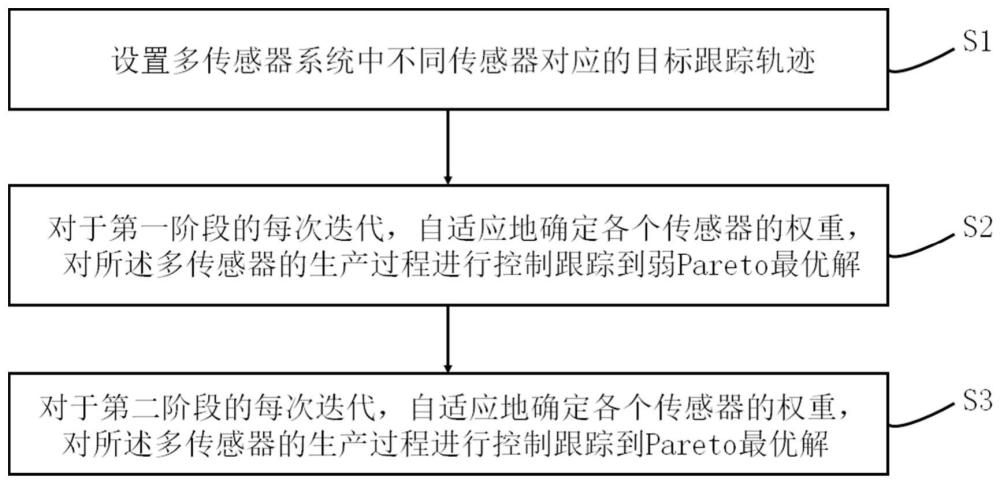
4、s1,设置多传感器系统中不同传感器对应的目标跟踪轨迹;
5、s2,对于第一阶段的每次迭代,自适应地确定的各个传感器的权重,对所述多传感器的生产过程进行控制跟踪到弱pareto最优解;
6、s3,对于第二阶段的每次迭代,自适应地确定的各个传感器的权重,对所述多传感器的生产过程进行控制跟踪到pareto最优解。
7、在本申请的一种实现方式中,在所述s2中,在第一阶段的每一迭代批次,执行下列处理:
8、s21,获取所述多传感器系统在当前迭代批次下各传感器检测到的系统输出,并结合各个传感器的目标跟踪轨迹计算对应的跟踪误差;
9、s22,根据预设计的第一自适应权重输入更新律,计算下一迭代批次的系统输入并进行更新;在所述第一自适应权重输入更新律中,所涉及的各传感器的权重通过第一跟踪性能优化问题来求解;
10、s23,返回s21进行执行,直到所有传感器的跟踪性能无法实现同时改进,此时跟踪到弱pareto最优解。
11、在本申请的一种实现方式中,在所述s3中,在第二阶段的每一迭代批次,执行下列处理:
12、s31,根据当前迭代批次之前得到的弱pareto最优解,将传感器分成第一部分和第二部分;
13、s32,根据与分组相应的第二自适应权重输入更新律,计算下一迭代批次的系统输入并进行更新;在所述第二自适应权重输入更新律中,所涉及的各传感器的权重通过第二跟踪性能优化问题来求解;
14、s33,返回s32进行执行,直到第二部分的传感器的跟踪性能无法实现同时改进,此时得到新的弱pareto最优解;
15、s34,返回s31进行执行,直到遍历所有的分组结果都有第二部分的传感器的跟踪性能无法实现同时改进,最终确定的弱pareto最优解为pareto最优解。
16、在本申请的一种实现方式中,所述多传感器系统的系统模型为:
17、xxk(t+1)=axk(t)+buk(t)
18、yi,k(t)=cixk(t)
19、其中,k代表迭代批次的序号,t代表离散时间点,i代表传感器的序号,xk(t)∈rn,uk(t)∈rp分别为系统状态、第i个传感器检测到的系统输出,以及系统输入,a,b,ci为系统矩阵。
20、在本申请的一种实现方式中,每个传感器跟踪目标轨迹设置为:yi,d(t),i=1,2,...,m,t=1,2,...,n;
21、每个传感器的跟踪误差计算为:ei,k(t)=yi,d(t)-yi,k(t),其中,t=1,2,...,n,i=1,2,...m。
22、在本申请的一种实现方式中,所述第一自适应权重输入更新律,具体为:
23、
24、其中,为系统的每个传感器的输入输出耦合矩阵,uk=[uk(0),...,uk(n-1)]t,ei,k=[ei,k(1),...,ei,k(n)]t,为第i个传感器在当前批次的权重值,σk为步长,
25、
26、在本申请的一种实现方式中,求解权重的第一跟踪性能优化问题,具体为:
27、
28、
29、
30、在本申请的一种实现方式中,将传感器分为第一部分和第二部分,满足:第一部分的传感器集合为第二部分的集合为j\i,且列满秩。
31、在本申请的一种实现方式中,所述第二自适应权重输入更新律,具体为:
32、
33、其中,uk=[uk(0),...,uk(n-1)]t,并且ei,k=[ei,k(1),...,ei,k(n)]t,为第j个传感器在当前批次的权重值,σk为步长。
34、在本申请的一种实现方式中,其特征在于,求解权重的第二跟踪性能优化问题,具体为:
35、
36、
37、
38、本发明由于采取以上技术方案,其具有以下优点:
39、本发明可以克服用户无法提前确定多传感器系统中每个传感器权重的难题;
40、本发明由于采用了自适应权重的处理方法,保证了每次更新每个传感器的跟踪性能指标都不会得到恶化,并且至少有一个传感器的跟踪性能得到改善。
技术特征:
1.一种多目标跟踪迭代学习方法,其特征在于,所述方法包括:
2.根据权利要求1所述的多目标跟踪迭代学习方法,其特征在于,在所述s2中,在第一阶段的每次迭代,执行下列处理:
3.根据权利要求2所述的多目标跟踪迭代学习方法,其特征在于,在所述s3中,在第二阶段的每次迭代,执行下列处理:
4.根据权利要求3所述的多目标跟踪迭代学习方法,其特征在于,所述多传感器系统的系统模型为:
5.根据权利要求4所述的多目标跟踪迭代学习方法,其特征在于,每个传感器跟踪目标轨迹设置为:yi,d(t),i=1,2,...,m,t=1,2,...,n;
6.根据权利要求5所述的多目标跟踪迭代学习方法,其特征在于,所述第一自适应权重输入更新律,具体为:
7.根据权利要求6所述的多目标跟踪迭代学习方法,其特征在于,求解权重的第一跟踪性能优化问题,具体为:
8.根据权利要求7所述的多目标跟踪迭代学习方法,其特征在于,将传感器分为第一部分和第二部分,满足:第一部分的传感器集合为第二部分的集合为j\i,且列满秩。
9.根据权利要求8所述的多目标跟踪迭代学习方法,其特征在于,所述第二自适应权重输入更新律,具体为:
10.根据权利要求9所述的多目标跟踪迭代学习方法,其特征在于,求解权重的第二跟踪性能优化问题,具体为:
技术总结
本发明涉及一种多目标跟踪迭代学习方法,包括:S1,设置多传感器系统中不同传感器对应的目标跟踪轨迹;S2,对于第一阶段的每次迭代,自适应地确定各个传感器的权重,对所述多传感器的生产过程进行控制跟踪到弱Pareto最优解;S3,对于第二阶段的每次迭代,自适应地确定各个传感器的权重,对所述多传感器的生产过程进行控制跟踪到Pareto最优解。本方案在两阶段的迭代更新中,自适应地确定各个传感器的权重,基于这些确定的权重进行批生产的迭代控制,不仅能够满足收敛,还能保证多传感器的跟踪性能在每次迭代后都得到Pareto改进。
技术研发人员:沈栋,张振法
受保护的技术使用者:中国人民大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!