路径规划方法及相关装置与流程
本申请涉及智能驾驶,具体地说,涉及路径规划,更具体地说,涉及一种路径规划方法及相关装置。
背景技术:
1、随着车辆的智能化发展,智能驾驶功能受到越来越多车企的重视。其中,合理规划智能驾驶车辆的行驶路径是实现智能驾驶功能的关键所在。现有技术中,一般是基于道路中心线进行路径规划,即希望车辆尽量靠近道路中心线行驶,但在一些情况下,如车辆行驶在曲率较大的道路时,由于车辆自身的特性,可能难以按照规划的路径行驶在道路中心线附近。
技术实现思路
1、基于上述现有技术的缺陷和不足,本申请提出一种路径规划方法及相关装置,能够解决现有技术中智能驾驶车辆易偏离道路中心线行驶的问题。
2、根据本申请实施例的第一方面,提供了一种路径规划方法,应用于搭载有无人机的车辆,所述方法包括:
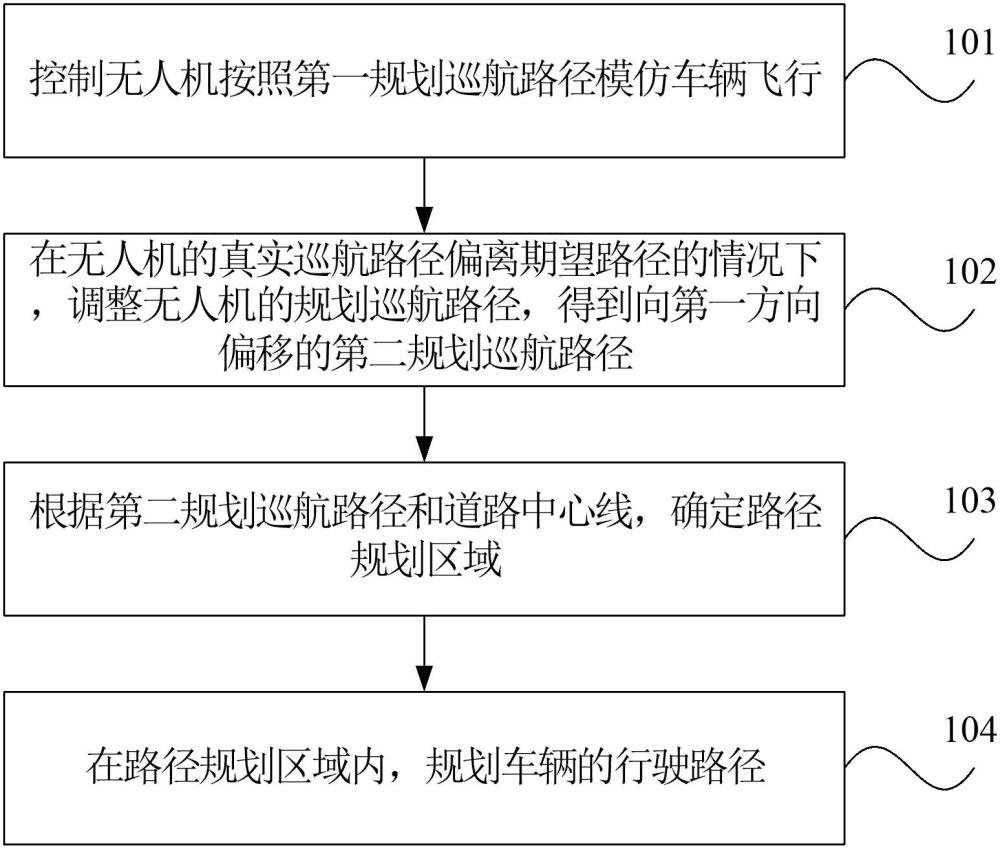
3、控制所述无人机按照第一规划巡航路径模仿所述车辆飞行;所述第一规划巡航路径是在所述车辆的运动学约束条件下规划得到的;
4、在所述无人机的真实巡航路径偏离期望路径的情况下,调整所述无人机的规划巡航路径,得到向第一方向偏移的第二规划巡航路径;所述第一方向与第二方向相反,所述第二方向为所述真实巡航路径偏离期望路径的方向;
5、根据所述第二规划巡航路径和道路中心线,确定路径规划区域;所述道路中心线为所述车辆所在车道的道路中心线;
6、在所述路径规划区域内,规划所述车辆的行驶路径。
7、根据本申请实施例的第二方面,提供了一种路径规划装置,应用于搭载有无人机的车辆,所述装置包括:
8、飞行控制模块,用于控制所述无人机按照第一规划巡航路径模仿所述车辆飞行;所述第一规划巡航路径是在所述车辆的运动学约束条件下规划得到的;
9、路径调整模块,用于在所述无人机的真实巡航路径偏离期望路径的情况下,调整所述无人机的规划巡航路径,得到向第一方向偏移的第二规划巡航路径;所述第一方向与第二方向相反,所述第二方向为所述真实巡航路径偏离期望路径的方向;
10、区域确定模块,用于根据所述第二规划巡航路径和道路中心线,确定路径规划区域;所述道路中心线为所述车辆所在车道的道路中心线;
11、路径规划模块,用于在所述路径规划区域内,规划所述车辆的行驶路径。
12、根据本申请实施例的第三方面,提供了一种车辆,所述车辆用于实现如第一方面所述的路径规划方法。
13、根据本申请实施例的第四方面,提供了一种路径规划系统,所述系统包括:车辆和无人机;
14、所述无人机用于在所述车辆的控制下模仿所述车辆飞行;
15、所述车辆用于实现如第一方面所述的路径规划方法。
16、根据本申请实施例的第五方面,提供了一种电子设备,包括:存储器和处理器;
17、所述存储器与所述处理器连接,用于存储程序;
18、所述处理器用于通过运行所述存储器中的程序,实现如第一方面所述的路径规划方法。
19、根据本申请实施例的第六方面,提供了一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时,实现如第一方面所述的路径规划方法。
20、根据本申请实施例的第七方面,提供了一种计算机程序产品或计算机程序,所述计算机程序产品包括计算机程序,所述计算机程序存储在计算机可读存储介质中;所述计算机设备的处理器从所述计算机可读存储介质读取所述计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的路径规划方法中的步骤。
21、在本申请提供的技术方案中,基于车辆的运动学约束,控制无人机模仿车辆,预先在车辆所要行驶的道路上方飞行一段,预测车辆的真实行驶路径。在无人机的真实巡航路径偏离期望路径的情况下,以克服偏离期望路径为目标,对无人机的规划巡航路径进行调整,之后结合该调整后的规划巡航路径以及道路中心线,确定路径规划区域,并在路径规划区域内进行路径规划。由于该路径规划区域考虑了行驶路径偏移的问题,因此,在此区域内规划出的行驶路径已经提前向相反方向偏移,这样车辆在按照规划的行驶路径进行行驶时,即使发生偏移,也可以减少车辆相对于道路中心线的偏离程度,从而使得车辆能够靠近道路中心线行驶。
技术特征:
1.一种路径规划方法,其特征在于,应用于搭载有无人机的车辆,所述方法包括:
2.根据权利要求1所述的路径规划方法,其特征在于,所述调整所述无人机的规划巡航路径,得到第二规划巡航路径,包括:
3.根据权利要求1所述的路径规划方法,其特征在于,所述在所述路径规划区域内,规划所述车辆的行驶路径,包括:
4.根据权利要求3所述的路径规划方法,其特征在于,所述在所述路径规划区域中进行采样,获得多个采样点,包括:
5.根据权利要求3或4所述的路径规划方法,其特征在于,所述根据所述多个采样点进行行驶路径的规划,包括:
6.根据权利要求5所述的路径规划方法,其特征在于,所述依据所述目标采样点进行行驶路径的规划,包括:
7.根据权利要求1所述的路径规划方法,其特征在于,在所述无人机的真实巡航路径偏离期望路径的情况下,调整所述无人机的规划巡航路径,得到第二规划巡航路径之前,所述方法还包括:
8.根据权利要求1所述的路径规划方法,其特征在于,所述控制所述无人机按照第一规划巡航路径模仿所述车辆飞行,包括:
9.一种路径规划装置,其特征在于,应用于搭载有无人机的车辆,所述装置包括:
10.一种车辆,其特征在于,所述车辆用于实现如权利要求1至8任一项所述的路径规划方法。
11.一种路径规划系统,其特征在于,所述系统包括:车辆和无人机;
12.一种电子设备,其特征在于,包括:存储器和处理器;
13.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时,实现如权利要求1至8任一项所述的路径规划方法。
技术总结
本申请提出一种路径规划方法及相关装置,涉及智能驾驶技术领域。该路径规划方法可以包括:控制无人机按照第一规划巡航路径模仿车辆飞行;第一规划巡航路径是在车辆的运动学约束条件下规划得到的;在无人机的真实巡航路径偏离期望路径的情况下,调整无人机的规划巡航路径,得到向第一方向偏移的第二规划巡航路径;第一方向与第二方向相反,第二方向为真实巡航路径偏离期望路径的方向;根据第二规划巡航路径和道路中心线,确定路径规划区域;在路径规划区域内,规划车辆的行驶路径。本申请提供的技术方案能够解决现有技术中车辆易偏离道路中心线行驶的问题。
技术研发人员:廖江
受保护的技术使用者:北京集度科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!