一种改进快速随机树搜索路径规划方法
本发明属于路径规划,尤其涉及一种改进快速随机树搜索路径规划方法。
背景技术:
1、常见的路径规划大致可以分为三大类:基于网格的算法、智能仿生算法、基于采样的算法。三类算法都各有所长,同时也存在一定的缺陷。基于网格的算法中典型的算法为:基于广度有优先的dijkstra算法、基于启发式搜索的a*算法等。此类算法,其核心是基于栅格的路径是搜索。对于简单的小环境,具有极快的搜索速度。但是,划分的栅格的单元数量随着空间维度的增长呈现出指数级增长。基于智能仿生算法典型的算法为:遗传学算法、粒子群算法、蚁群算法等。此类算法是受到自然界的启发而提出的。智能仿生学算法不需要目标函数和约束的连续性,故对于不确定环境的适应能力强,但是存在易陷入局部最优,以及求解效率低且耗时的问题。基于采样的算法通过迭代地添加随机样本,逐步构建路径集,从而避免了构型空间的复杂几何建模,故此类算法能够有效地解决多约束和高维路径规划问题,并且在复杂环境中执行路径规划有着优势。其中概率路线图算法(prm)和快速随机树搜索算法(rrt)是基于采样的算法中的两大典型。因此,针对复杂环境大环境下,对于rrt算法的研究有着重要的意义。
2、对于快速随机搜索树的无人车路径规划算法,研究的方向有许多。但是针对,缩减快速随机树搜索算法中的搜索区域的方式不多见。其中,典型的就是informed-rrt*算法。该算法,先通过原始的rrt算法,找到初始路径后,生成超椭圆搜索区域,以此来限制搜索区域。
3、informed-rrt*算法在一些复杂的环境下,还是存在一定的缺陷。由于算法是基于快速随机搜索树的,生长节点随机的,对于开始的寻找初始路径解的,效率的低下,且随着环境的复杂性增加,随机性也将增加。同时对于复杂迷宫环境,informed-rrt*生成的限制搜索空间可能为整个搜索空间。
技术实现思路
1、本发明目的在于提供一种改进快速随机树搜索路径规划方法,以解决上述的技术问题。
2、为解决上述技术问题,本发明的一种改进快速随机树搜索路径规划方法的具体技术方案如下:
3、一种改进快速随机树搜索路径规划方法,包括如下步骤:
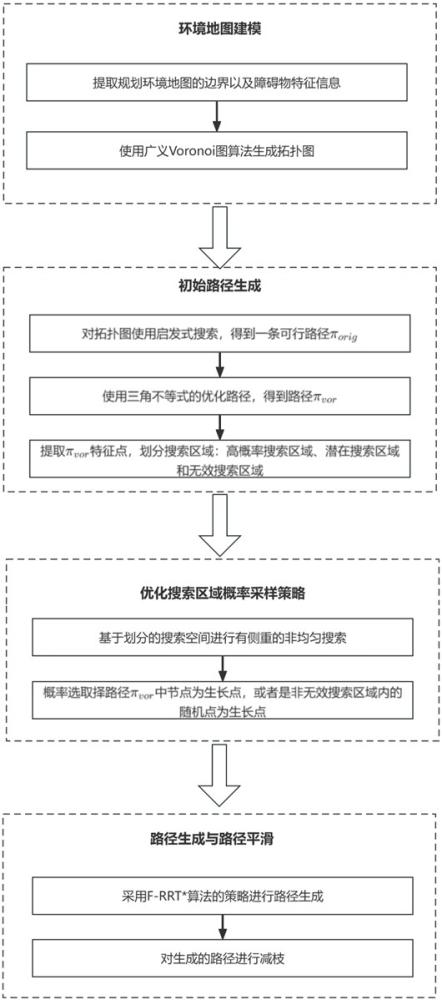
4、步骤1、通过广义voronoi图算法,将障碍物边界以及地图边界作为种子节点对地图处理,生成拓扑图;
5、步骤二:采用启发式搜索策略在生成的拓扑图上生成一条可行路径,记为πorig;
6、步骤三:通过三角不等式简化路径节点数量,从而实现路径的优化,记录优化后的路径为πvor;
7、步骤四:将路径πvor信息离散化后,以一定概率作为随机采样点传入到快速随机树搜索算法中作为目标引导;
8、步骤五:遍历πvor,提取路径特征点,划分搜索区域为三个:高概率搜索区域,潜在搜索区域和无效搜索区域;
9、步骤六:将划分的三个搜索区域代替快速随机树搜索算法中的整个搜索区域进行搜索;
10、步骤七:采用f-rrt*算法的策略进行路径生成;
11、步骤八:对生成的路径进行减枝操作。
12、进一步的,所述步骤1包括如下步骤:
13、步骤1.1、数据准备;
14、步骤1.2、广义voronoi区域计算;
15、步骤1.3、广义voronoi图的构建。
16、进一步的,所述步骤1.1将待规划环境地图中的边界以及障碍边缘进行离散化处理,得到二维点集p={p1,p2,…,pn}。
17、进一步的,所述步骤1.2对于每个点pi∈p,计算其到所有其他点pj的欧氏距离,找到与pi距离最近的点pj,将其添加到pi的邻域集合ni中,这样,对于每个点pi,得到其邻域集合ni,
18、其中,对于点pi,其到其他点pj的欧氏距离d(pi,pj)表示为:
19、
20、进一步的,所述步骤1.3对于每个点pi,根据其邻域ni中的点pj,构建出pi的广义voronoi区域,该区域由所有使得pi与pj最近的点的垂直平分线组成,这些垂直平分线相互交汇,形成了广义voronoi图的边界,每个边界代表着两个相邻点之间的分界线,即
21、
22、进一步的,所述步骤3基于基本三角不等式的性质,结合碰撞检进行路径节点的优化,定义找到的路径πorig由若干个有限节点所组成,记为πorig={x1,x2,…,xn},函数collisionfree(xu,xj)的功能为:当直接连接节点xi与节点xj之间不会与障碍物发生碰撞时返回true,反之,返回false。进一步的,所述步骤5包括如下步骤:
23、步骤5.1、寻找x、y两个方向轴上四个最值点,记为xmin、xmax、ymin、ymax;
24、步骤5.2、以上述四个最值点组成四个顶点坐标p1=(xmin,ymin)、p2=(xmin,ymax)、p3=(xmax,ymin)、p4=(xmax,ymax),记以p1、p2、p3、p4为顶点所围成的矩形为z1,若搜索区域满足时,该搜索区域为无效搜索区域;
25、步骤5.3、过路径起点pstart与路径终点pgoal求直线方程,记为l,遍历路径πvor中所有节点,找到其中距离直线方程l的欧式距离最远的节点,并记录该点坐标信息为pe=(xextreme,yextreme),并求出点pe关于直线l的对称点p′e=(x′extreme,y′extreme);
26、步骤5.4、求平行于直线方程l,且分别过pe与p′e的两条直线方程,分别交直线x=xmin、x=xmax、y=ymin、y=ymax于pxmin、pxmax、pymin、pymax;
27、步骤5.5、将上述点与起点和目标终点进行有序连接,组成多边形z2,因此,x∈z2为高概算区域,x∈z1一(z1∩z2)为潜在搜索区域。
28、进一步的,所述步骤7的f-rrt*算法是使用二分法经由阈值ddichotomy判断直接创造节点xcreat。
29、本发明的一种改进快速随机树搜索路径规划方法具有以下优点:
30、本发明专利提供了一种基于广义voronoi图的改进快速随机树搜索路径规划方法。该方法在广义voronoi图的基础上,结合启发式搜索算法,快速生成一条可行路径的同时结合可行路径的特征信息对搜索区域进行划分:高概率搜索区域,潜在搜索区域和无效搜索区域。从而提高快速搜索树算法的搜索效率以及收敛速度。同时采用了f-rrt*的策略进行路径的生成,使得保持搜索的高效性的同时具有更好的路径平滑度。
31、本次发明的创新之处在于在快速找到初始可行路径的同时利用路径的特征信息对搜索区域进行区域划分,采用非均匀采样策略提高了快速随机搜索树算法的效率。
技术特征:
1.一种改进快速随机树搜索路径规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的改进快速随机树搜索路径规划方法,其特征在于,所述步骤1包括如下步骤:
3.根据权利要求2所述的改进快速随机树搜索路径规划方法,其特征在于,所述步骤1.1将待规划环境地图中的边界以及障碍边缘进行离散化处理,得到二维点集p={p1,p2,...,pn}。
4.根据权利要求2所述的改进快速随机树搜索路径规划方法,其特征在于,所述步骤1.2对于每个点pi∈p,计算其到所有其他点pj的欧氏距离,找到与pi距离最近的点pj,将其添加到pi的邻域集合ni中,这样,对于每个点pi,得到其邻域集合ni,
5.根据权利要求2所述的改进快速随机树搜索路径规划方法,其特征在于,所述步骤1.3对于每个点pi,根据其邻域ni中的点pj,构建出pi的广义voronoi区域,该区域由所有使得pi与pj最近的点的垂直平分线组成,这些垂直平分线相互交汇,形成了广义voronoi图的边界,每个边界代表着两个相邻点之间的分界线,即
6.根据权利要求1所述的改进快速随机树搜索路径规划方法,其特征在于,所述步骤3基于基本三角不等式的性质,通过碰撞检测进行路径节点的优化。定义找到的路径πorig由若干个有限节点所组成,记为πorig={x1,x2,...,xn},函数collisionfree(xi,xi)的功能为:当直接连接节点xi与节点xj之间不会与障碍物发生碰撞时返回true,反之,返回false。
7.根据权利要求1所述的改进快速随机树搜索路径规划方法,其特征在于,所述步骤5包括如下步骤:
8.根据权利要求1所述的改进快速随机树搜索路径规划方法,其特征在于,所述步骤7的f-rrt*算法是使用二分法经由阈值ddichotomy判断直接创造节点xcreat。
技术总结
本发明属于路径规划技术领域,公开了一种改进快速随机树搜索路径规划方法,首先使用广义Voronoi图算法对待规划地图进行处理,生成拓扑图。限制启发式搜索算法的搜索范围,保证所得路径距离障碍物边界保持一定的距离,即路径为可行非最优路径。再使用启发式搜索算法快速找到初始可行路径,这比使用经典快速随机搜索树算法进行整个搜索空间进行随机采样搜索的效率高。使用三角不等式优化路径,提取路径的特征点,为之后的搜索提供特征点引导,便于之后的搜索区域划分。当划分好搜索区域后,使得随机采样集中于高概率搜索区域,形成有侧重的非均匀搜索策略,使得在相同的时间或是迭代次数的条件下,本发明提出的算法能获得的高质量的路径。
技术研发人员:孟陈晨,董佳明,焦若锴,余海洋,余善恩,孙伟华
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!