无人机飞行速度的自动控制方法
本发明涉及无人机自动控制,具体提供一种无人机飞行速度的自动控制方法。
背景技术:
1、无人机通常需要持续对地面拍照,为了保证对地面拍照照片的连续性,相邻照片之间必须保证具有一定的重叠率,因相机拍摄时间间隔是一定的,而空中风速经常变换,会导致相邻照片之间的重叠率过低,或者相邻照片不连续,所以需要操作手手动调节飞机飞行速度,保证相邻照片之间必须保证设定的重叠率,这项工作给操作手造成了极大的操作负担。因此,需要一种自动化根据飞机飞行速度,飞机姿态等变量计算可见光相机拍照的重叠率,减少了无人机操作手的手工计算重叠率并手工调整无人机飞行速度操作负担的方法。
技术实现思路
1、本发明为解决上述问题,提供了一种无人机飞行速度的自动控制方法,通过将照片坐标点由相机坐标系转化为地心坐标系,并计算地心坐标系下相邻照片的重叠率,根据重叠率与预先设定的重叠率指标范围进行比较,进而对无人机飞行速度进行自动调节。
2、本发明提供的无人机飞行速度的自动控制方法,无人机上设置有用于连续拍摄照片的相机,设定相机任意一次拍摄照片的时刻为t1,下一次拍摄照片的时刻为t2,包括以下步骤:
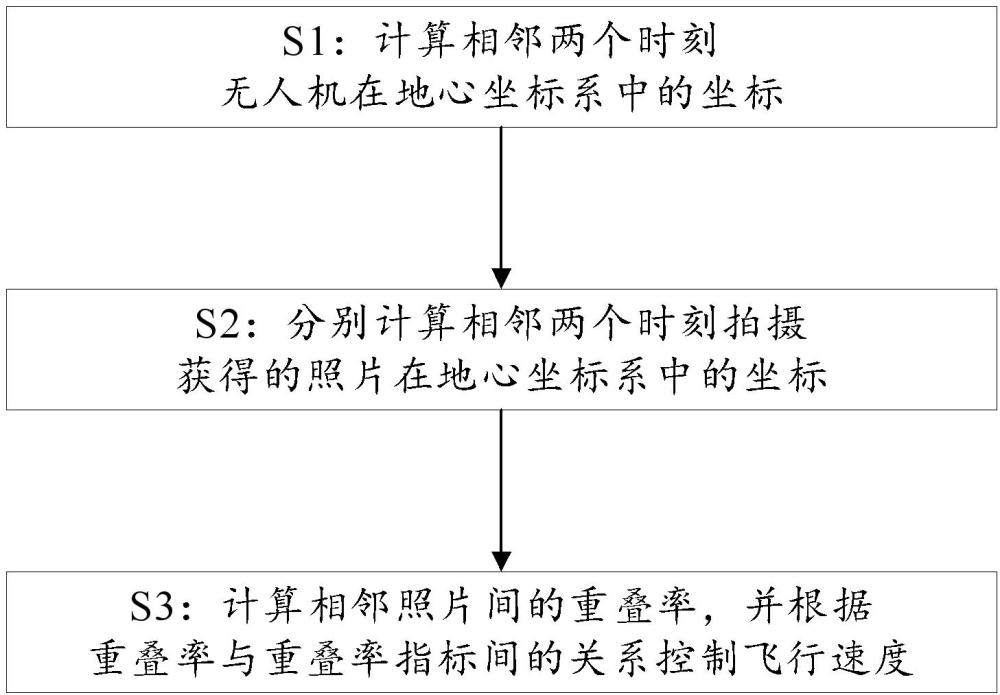
3、s1:在t1和t2时刻,分别计算无人机在地心坐标系中的坐标;
4、s2:在t1时刻相机拍摄获得第一照片,在t2时刻相机拍摄获得第二照片,分别计算所述第一照片和所述第二照片在地心坐标系中的坐标;
5、s3:根据所述第一照片和所述第二照片在地心坐标系中的坐标,计算所述第一照片和所述第二照片的重叠率,若重叠率小于最小重叠率指标,则控制无人机提高飞行速度;若重叠率大于最大重叠率指标,则控制无人机降低飞行速度。
6、优选的,所述最小重叠率指标为20%,所述最大重叠率指标为30%。
7、优选的,在t1和t2时刻,分别计算无人机在地心坐标系中的坐标过程如下:
8、计算地球椭球第一偏心率e1如下:
9、;
10、其中,表示地球椭球长半轴,表示地球椭球短半轴;
11、采集t1时刻无人机的经度l1、纬度b1和高度h1;
12、计算t1时刻无人机的椭球卯酉圈曲率半径n1如下:
13、;
14、将在t1时刻无人机的坐标由大地坐标系转化为地心坐标系,获得的坐标为:
15、;
16、;
17、;
18、在t2时刻,无人机在地心坐标系中的坐标计算过程如下:
19、采集t2时刻无人机的经度l2、纬度b2和高度h2;
20、计算t2时刻无人机的椭球卯酉圈曲率半径n2如下:
21、;
22、将在t2时刻无人机的坐标由大地坐标系转化为地心坐标系,获得的坐标为:
23、;
24、;
25、。
26、优选的,计算t1时刻至t2时刻无人机的飞行距离distance为:
27、;
28、则无人机的飞行速度speed为:
29、。
30、优选的,所述第一照片和所述第二照片均为矩形。
31、优选的,计算任意照片的4个顶点在地心坐标系中的坐标的过程如下:
32、照片的左上角顶点,在相机坐标系中的坐标为:
33、;
34、照片的右上角顶点,在相机坐标系中的坐标为:
35、;
36、照片的左下角顶点,在相机坐标系中的坐标为:
37、;
38、照片的右下角顶点,在相机坐标系中的坐标为:
39、;
40、其中, width表示所述相机x向像元数, height表示所述相机y向像元数, pixsize表示所述相机的像元尺寸;
41、将照片的4个顶点坐标由相机坐标系转化到无人机坐标系的转化矩阵m为:
42、;
43、其中,a表示无人机拍摄相片时的方位角,e表示无人机拍摄相片时的俯仰角;
44、将照片4个顶点坐标由无人机坐标系转化到地心坐标系的转化矩阵g为:
45、;
46、其中,c表示无人机拍摄相片时的航向角,r表示无人机拍摄相片时的横滚角;
47、照片的左上角顶点,在地心坐标系中的坐标为:
48、;
49、照片的右上角顶点,在地心坐标系中的坐标为:
50、;
51、照片的左下角顶点,在地心坐标系中的坐标为:
52、;
53、照片的右下角顶点,在地心坐标系中的坐标为:
54、;
55、其中,表示无人机拍摄相片时在地心坐标系中的坐标。
56、与现有技术相比,本发明能够取得如下有益效果:
57、本发明实时计算相机拍摄获得的相邻照片之间的重叠率,并将该重叠率与设定的重叠率指标范围进行比较,进而自动控制飞机飞行速度使相邻照片之间的重叠率满足重叠率指标要求,避免了操作手手动调节飞机飞行速度,减少了人工干预的需求,在无人机有拍摄需求时实现了飞行速度的自动控制。
技术特征:
1.一种无人机飞行速度的自动控制方法,无人机上设置有用于连续拍摄照片的相机,设定相机任意一次拍摄照片的时刻为t1,下一次拍摄照片的时刻为t2,其特征在于,包括以下步骤:
2.如权利要求1所述的无人机飞行速度的自动控制方法,其特征在于,所述最小重叠率指标为20%,所述最大重叠率指标为30%。
3.如权利要求1所述的无人机飞行速度的自动控制方法,其特征在于,在t1和t2时刻,分别计算无人机在地心坐标系中的坐标过程如下:
4.如权利要求3所述的无人机飞行速度的自动控制方法,其特征在于,计算t1时刻至t2时刻无人机的飞行距离distance为:
5.如权利要求1所述的无人机飞行速度的自动控制方法,其特征在于,所述第一照片和所述第二照片均为矩形。
6.如权利要求5所述的无人机飞行速度的自动控制方法,其特征在于,计算任意照片的4个顶点在地心坐标系中的坐标的过程如下:
技术总结
本发明涉及无人机自动控制技术领域,具体提供一种无人机飞行速度的自动控制方法,包括以下步骤:无人机上设置有用于连续拍摄照片的相机,计算相邻两个时刻无人机在地心坐标系中的坐标;分别计算相邻两个时刻拍摄获得的照片在地心坐标系中的坐标;根据相邻照片在地心坐标系中的坐标计算相邻照片间的重叠率,并根据重叠率与重叠率指标间的关系控制飞行速度,如重叠率小于指标要求,则自动控制飞机降低飞行速度,直到重叠率大于20%;如重叠率大于指标要求,则自动控制飞机降低飞行速度,直到重叠率小于30%。本发明避免了操作手手动调节飞机飞行速度,减少了人工干预的需求。
技术研发人员:王宣,左羽佳,徐芳,白冠冰,刘成龙
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!