多无人机集群编队协同控制方法及其系统与流程
本发明涉及智能化协同控制,尤其涉及一种多无人机集群编队协同控制方法及其系统。
背景技术:
1、多无人机集群编队是指多个无人机通过无线通信和协同控制算法,实现无人机群呈现预定的空间分布或运动规律的一种技术。多无人机集群编队可以提高无人机的任务效率和生存能力,实现复杂的空中作战和侦察任务。
2、多无人机集群编队协同控制是指在考虑无人机之间的相互作用和环境约束的情况下,设计合适的控制策略,使得多无人机能够按照预定的目标和要求,完成编队形成、变换和跟随等动作的一种技术。然而,多无人机集群编队协同控制也面临着一些挑战,其中之一就是通信稳定性问题。通信稳定性是无人机群保持协同稳定的关键,但在通信过程中会受无人机的实时速度之间的影响,导致通信链路的断开或延迟。因此,期待一种解决方案。
技术实现思路
1、本发明实施例提供一种多无人机集群编队协同控制方法及其系统,其指定多无人机集群中的第一无人机为虚拟领导者,并获得虚拟领导者的实时速度值和位置信息;基于多无人机集群中其他无人机的实时速度值和虚拟领导者的实时速度值构造速度协同输入向量;构造多无人机集群的通信拓扑矩阵,其中,通信拓扑矩阵中非对角线位置上各个位置的值为相应两个无人机之间的通信距离值;以及,基于速度协同输入向量和多无人机集群的通信拓扑矩阵来确定多无人机集群的协同稳定性是否符合预定标准。这样,可以综合利用速度信息和多无人机集群的通信拓扑信息,并结合人工智能技术来智能化地判断多无人机集群的协同稳定性是否符合预定标准。
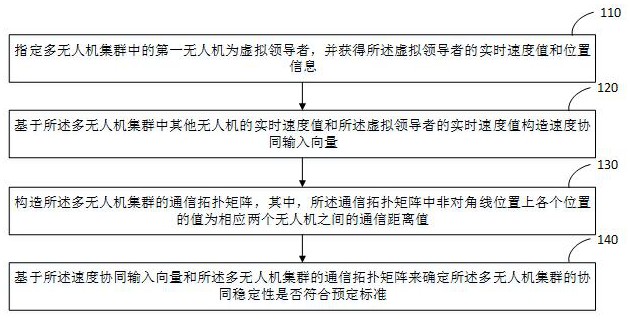
2、本发明实施例还提供了一种多无人机集群编队协同控制方法,其包括:指定多无人机集群中的第一无人机为虚拟领导者,并获得所述虚拟领导者的实时速度值和位置信息;基于所述多无人机集群中其他无人机的实时速度值和所述虚拟领导者的实时速度值构造速度协同输入向量;构造所述多无人机集群的通信拓扑矩阵,其中,所述通信拓扑矩阵中非对角线位置上各个位置的值为相应两个无人机之间的通信距离值;以及基于所述速度协同输入向量和所述多无人机集群的通信拓扑矩阵来确定所述多无人机集群的协同稳定性是否符合预定标准。
3、本发明实施例还提供了一种多无人机集群编队协同控制系统,其包括:数据获取模块,用于指定多无人机集群中的第一无人机为虚拟领导者,并获得所述虚拟领导者的实时速度值和位置信息;协同向量构造模块,用于基于所述多无人机集群中其他无人机的实时速度值和所述虚拟领导者的实时速度值构造速度协同输入向量;拓扑矩阵构造模块,用于构造所述多无人机集群的通信拓扑矩阵,其中,所述通信拓扑矩阵中非对角线位置上各个位置的值为相应两个无人机之间的通信距离值;以及多无人机集群的协同稳定性判断模块,用于基于所述速度协同输入向量和所述多无人机集群的通信拓扑矩阵来确定所述多无人机集群的协同稳定性是否符合预定标准。
技术特征:
1.一种多无人机集群编队协同控制方法,其特征在于,包括:指定多无人机集群中的第一无人机为虚拟领导者,并获得所述虚拟领导者的实时速度值和位置信息;基于所述多无人机集群中其他无人机的实时速度值和所述虚拟领导者的实时速度值构造速度协同输入向量;构造所述多无人机集群的通信拓扑矩阵,其中,所述通信拓扑矩阵中非对角线位置上各个位置的值为相应两个无人机之间的通信距离值;以及基于所述速度协同输入向量和所述多无人机集群的通信拓扑矩阵来确定所述多无人机集群的协同稳定性是否符合预定标准。
2.根据权利要求1所述的多无人机集群编队协同控制方法,其特征在于,基于所述多无人机集群中其他无人机的实时速度值和所述虚拟领导者的实时速度值构造速度协同输入向量,包括:分别计算所述多无人机集群中其他无人机的实时速度值相对于所述虚拟领导者的实时速度值之间的差值以得到由多个实时速度差值组成的所述速度协同输入向量。
3.根据权利要求2所述的多无人机集群编队协同控制方法,其特征在于,基于所述速度协同输入向量和所述多无人机集群的通信拓扑矩阵来确定所述多无人机集群的协同稳定性是否符合预定标准,包括:融合所述速度协同输入向量和所述通信拓扑矩阵以得到速度引导无人机群协同稳定性特征图;以及基于所述速度引导无人机群协同稳定性特征图,确定所述多无人机集群的协同稳定性是否符合预定标准。
4.根据权利要求3所述的多无人机集群编队协同控制方法,其特征在于,融合所述速度协同输入向量和所述通信拓扑矩阵以得到速度引导无人机群协同稳定性特征图,包括:将所述通信拓扑矩阵和所述速度协同输入向量通过包含卷积神经网络模型和一维卷积层的metanet模块以得到所述速度引导无人机群协同稳定性特征图。
5.根据权利要求4所述的多无人机集群编队协同控制方法,其特征在于,将所述通信拓扑矩阵和所述速度协同输入向量通过包含卷积神经网络模型和一维卷积层的metanet模块以得到所述速度引导无人机群协同稳定性特征图,包括:使用所述metanet模块的所述卷积神经网络模型对所述通信拓扑矩阵进行特征提取以得到通信拓扑特征图;使用所述metanet模块的所述一维卷积层对所述速度协同输入向量进行时序特征提取以得到速度协同特征向量;以及将所述通信拓扑特征图和所述速度协同特征向量进行交互以得到所述速度引导无人机群协同稳定性特征图。
6.根据权利要求5所述的多无人机集群编队协同控制方法,其特征在于,基于所述速度引导无人机群协同稳定性特征图,确定所述多无人机集群的协同稳定性是否符合预定标准,包括:对所述速度引导无人机群协同稳定性特征图进行优化以得到优化速度引导无人机群协同稳定性特征图;以及将所述优化速度引导无人机群协同稳定性特征图通过分类器以得到分类结果,所述分类结果用于表示所述多无人机集群的协同稳定性是否符合预定标准。
7.一种多无人机集群编队协同控制系统,其特征在于,包括:数据获取模块,用于指定多无人机集群中的第一无人机为虚拟领导者,并获得所述虚拟领导者的实时速度值和位置信息;协同向量构造模块,用于基于所述多无人机集群中其他无人机的实时速度值和所述虚拟领导者的实时速度值构造速度协同输入向量;拓扑矩阵构造模块,用于构造所述多无人机集群的通信拓扑矩阵,其中,所述通信拓扑矩阵中非对角线位置上各个位置的值为相应两个无人机之间的通信距离值;以及多无人机集群的协同稳定性判断模块,用于基于所述速度协同输入向量和所述多无人机集群的通信拓扑矩阵来确定所述多无人机集群的协同稳定性是否符合预定标准。
8.根据权利要求7所述的多无人机集群编队协同控制系统,其特征在于,所述协同向量构造模块,用于:分别计算所述多无人机集群中其他无人机的实时速度值相对于所述虚拟领导者的实时速度值之间的差值以得到由多个实时速度差值组成的所述速度协同输入向量。
9.根据权利要求8所述的多无人机集群编队协同控制系统,其特征在于,所述多无人机集群的协同稳定性判断模块,包括:融合单元,用于融合所述速度协同输入向量和所述通信拓扑矩阵以得到速度引导无人机群协同稳定性特征图;以及性能判断单元,用于基于所述速度引导无人机群协同稳定性特征图,确定所述多无人机集群的协同稳定性是否符合预定标准。
10.根据权利要求9所述的多无人机集群编队协同控制系统,其特征在于,所述融合单元,用于:将所述通信拓扑矩阵和所述速度协同输入向量通过包含卷积神经网络模型和一维卷积层的metanet模块以得到所述速度引导无人机群协同稳定性特征图。
技术总结
本发明公开了一种多无人机集群编队协同控制方法及其系统,其指定多无人机集群中的第一无人机为虚拟领导者,并获得虚拟领导者的实时速度值和位置信息;基于多无人机集群中其他无人机的实时速度值和虚拟领导者的实时速度值构造速度协同输入向量;构造多无人机集群的通信拓扑矩阵,其中,通信拓扑矩阵中非对角线位置上各个位置的值为相应两个无人机之间的通信距离值;以及,基于速度协同输入向量和多无人机集群的通信拓扑矩阵来确定多无人机集群的协同稳定性是否符合预定标准。这样,可以综合利用速度信息和多无人机集群的通信拓扑信息,并结合人工智能技术来智能化地判断多无人机集群的协同稳定性是否符合预定标准。
技术研发人员:周涛,李凯,陈其泉,孙文达,徐超洋,刘一彤,高思元,巴国杰
受保护的技术使用者:杭州牧星科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!