一种面向城市低空的无人机飞行路径规划方法及系统与流程
本发明涉及城市低空路径规划,尤其涉及一种面向城市低空的无人机飞行路径规划方法及系统。
背景技术:
1、当前,城市低空无人机物流处于起步阶段,行业中对航路航线规划的实施方案还非常简单,大致包括:首先确定运输的起点和终点,由相关人员在卫星地图上绘制无人机飞行航线,工作人员按照飞行航线进行现场勘察后进行实际飞行的验证。完成这整个过程的一条航线就需要花费一天的时间,可见,现有技术中的航线规划的效率低,无法满足城市低空无人机飞行的大规模应用的需求。
技术实现思路
1、本发明提供了一种面向城市低空的无人机飞行路径规划方法及系统,以解决现有技术中的航线规划的效率低,无法满足城市低空无人机飞行的大规模应用的需求的问题。
2、为了实现上述目的,本发明通过如下的技术方案来实现:
3、第一方面,本发明提供一种面向城市低空的无人机飞行路径规划方法,包括:
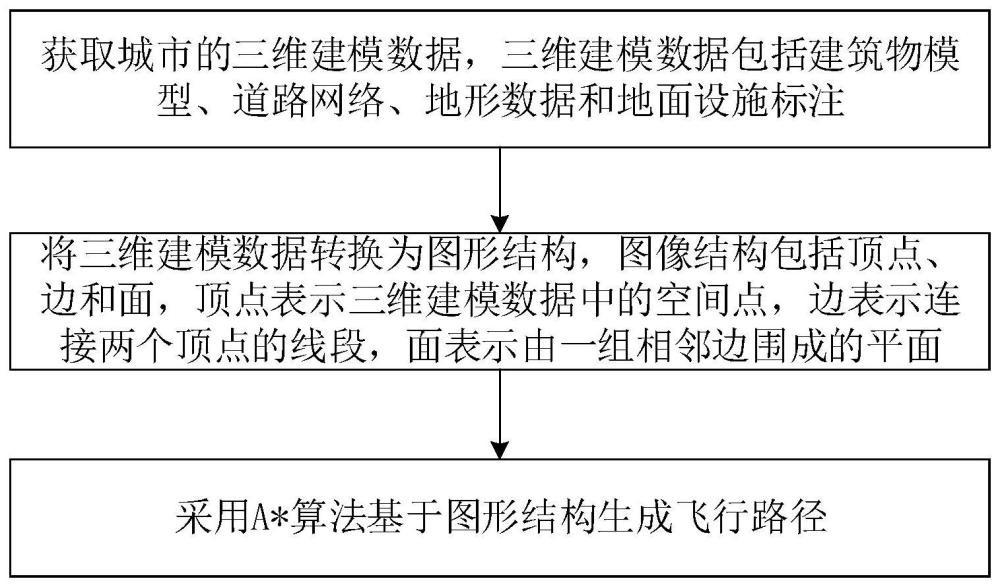
4、获取城市的三维建模数据,所述三维建模数据包括建筑物模型、道路网络、地形数据和地面设施标注;
5、将所述三维建模数据转换为图形结构,所述图像结构包括顶点、边和面,所述顶点表示三维建模数据中的空间点,所述边表示连接两个顶点的线段,所述面表示由一组相邻边围成的平面;
6、采用a*算法基于所述图形结构生成飞行路径。
7、第二方面,本申请提供一种面向城市低空的无人机飞行路径规划系统,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述方法的步骤。
8、有益效果:
9、本发明提供的面向城市低空的无人机飞行路径规划方法,首先获取城市的三维建模数据,三维建模数据包括建筑物模型、道路网络、地形数据和地面设施标注;将三维建模数据转换为图形结构,图像结构包括顶点、边和面,顶点表示三维建模数据中的空间点,边表示连接两个顶点的线段,面表示由一组相邻边围成的平面;采用a*算法基于图形结构生成飞行路径。这样,充分利用了数字城市的三维模型的数据,快速实现了任一点至任一点的三维路径规划,极大的提高了城市低空无人机飞行的路径绘制的自动化水平,可以满足城市大规模无人机飞行作业的需求。
技术特征:
1.一种面向城市低空的无人机飞行路径规划方法,其特征在于,包括:
2.根据权利要求1所述的面向城市低空的无人机飞行路径规划方法,其特征在于,所述将所述三维建模数据转换为图形结构,包括:
3.根据权利要求2所述的面向城市低空的无人机飞行路径规划方法,其特征在于,所述采用a*算法基于所述图形结构生成飞行路径之前,所述方法还包括:
4.根据权利要求3所述的面向城市低空的无人机飞行路径规划方法,其特征在于,所述将所述三维地图通过网格化处理得到二维网格之后,所述方法还包括:
5.根据权利要求4所述的面向城市低空的无人机飞行路径规划方法,其特征在于,所述采用a*算法基于所述图形结构生成飞行路径,包括:
6.根据权利要求5所述的面向城市低空的无人机飞行路径规划方法,其特征在于,所述确定每一条飞行路径的安全系数,包括:
7.根据权利要求5所述的面向城市低空的无人机飞行路径规划方法,其特征在于,确定每一条飞行路径的路径长度系数时,满足如下关系式:
8.一种面向城市低空的无人机飞行路径规划系统,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述权利要求1至7中任一项所述方法的步骤。
技术总结
本发明涉及城市低空路径规划技术领域,公开了一种面向城市低空的无人机飞行路径规划方法及系统,该方法首先获取城市的三维建模数据,三维建模数据包括建筑物模型、道路网络、地形数据和地面设施标注;将三维建模数据转换为图形结构,图像结构包括顶点、边和面,顶点表示三维建模数据中的空间点,边表示连接两个顶点的线段,面表示由一组相邻边围成的平面;采用A*算法基于图形结构生成飞行路径。这样,充分利用了数字城市的三维模型的数据,快速实现了任一点至任一点的三维路径规划,极大的节省了城市低空无人机飞行的路径绘制的自动化水平,可以满足城市大规模无人机飞行作业的需求。
技术研发人员:戴旺,雷芳,葛楚唯,蒋鹏程,朱紫棋
受保护的技术使用者:湖南智航飞购科技有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!