旋变仿真的控制方法、装置、介质与流程
本申请涉及计算机,具体而言,涉及一种旋变仿真的控制方法、装置、介质。
背景技术:
1、随着科技的发展,旋转变压器能够将角度的指示信号转换成电信号,可以部署在飞机、航空发动机、工业电机控制、伺服器、机器人、混合动力和全电动汽车中的机械单元、动力单元以及要求提供精确位置控制、轴旋转的许多应用中。在这些应用中可以长期耐受严苛条件,是恶劣环境下军用/民用系统的最佳选择。因此有很多旋变采集处理的设备处理旋变信号。此时,旋变仿真需要在不同状态进行把控,现在旋变仿真仅仅基于静态进行把控,不便于旋变传感器信号精确、快速的仿真输出。
技术实现思路
1、本申请的实施例提供了一种旋变仿真的控制方法、装置、介质,进而至少在一定程度上针对旋变仿真输出在静态和动态均进行把控,以便于在不同状态下采用对应的控制逻辑,从而保证了旋变仿真输出信号的高性能指标,以便于对旋变传感器信号精确、快速的仿真输出。
2、本申请的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本申请的实践而习得。
3、根据本申请实施例的一个方面,提供了一种旋变仿真的控制方法,包括:
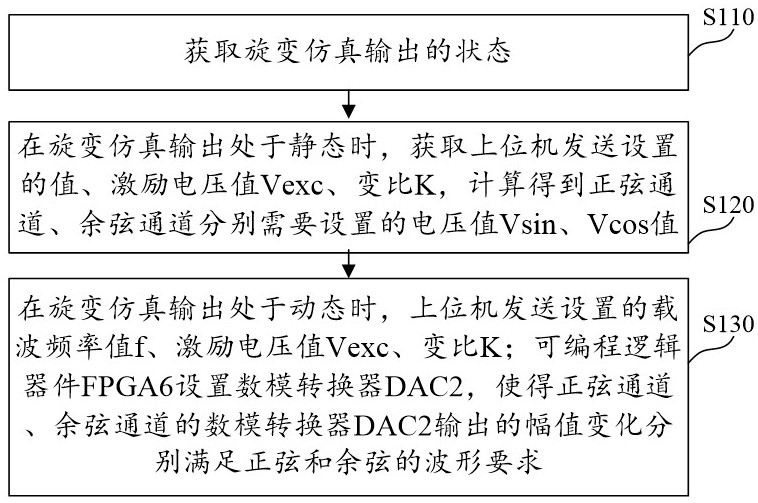
4、获取旋变仿真输出的状态;
5、在旋变仿真输出处于静态时,获取上位机发送设置的值、激励电压值vexc、变比k,计算得到正弦通道、余弦通道分别需要设置的电压值vsin、vcos值;
6、在旋变仿真输出处于动态时,上位机发送设置的载波频率值f、激励电压值vexc、变比k;可编程逻辑器件fpga6设置数模转换器dac2,使得正弦通道、余弦通道的数模转换器dac2输出的幅值变化分别满足正弦和余弦的波形要求。
7、可选的,所述在旋变仿真输出处于静态时,获取上位机发送设置的值、激励电压值vexc、变比k,计算得到正弦通道、余弦通道分别需要设置的电压值vsin、vcos值,包括:
8、静态的电压值vsin、vcos值的计算公式如下:
9、。
10、可选的,所述在旋变仿真输出处于静态时,获取上位机发送设置的值、激励电压值vexc、变比k,计算得到正弦通道、余弦通道分别需要设置的电压值vsin、vcos值,还包括:
11、可编程逻辑器件fpga6设置直接数字频率合成器dds3的频率值与激励信号的频率相同,设置正弦通道、余弦通道的数模转换器dac2分别为对应的电压定值vsin、vcos值。
12、可选的,所述在旋变仿真输出处于动态时,上位机发送设置的载波频率值f、激励电压值vexc、变比k;可编程逻辑器件fpga6设置数模转换器dac2,使得正弦通道、余弦通道的数模转换器dac2输出的幅值变化分别满足正弦和余弦的波形要求,包括:
13、动态的电压值vsin、vcos值的计算公式如下:
14、。
15、可选的,所述在旋变仿真输出处于动态时,上位机发送设置的载波频率值f、激励电压值vexc、变比k;可编程逻辑器件fpga6设置数模转换器dac2,使得正弦通道、余弦通道的数模转换器dac2输出的幅值变化分别满足正弦和余弦的波形要求,还包括:
16、可编程逻辑器件fpga6设置直接数字频率合成器dds3的频率值与激励信号的频率相同;数模转换器dac2的输入信号为直接数字频率合成器dds3的输出信号,只是做了幅值变化,相当于两个信号做了乘法运算。
17、可选的,所述旋变仿真的控制方法还包括:
18、波形的频率由可编程逻辑器件fpga6设置直接数字频率合成器dds3旋变仿真输出信号的频率输出值和相位值,实现了旋变仿真输出信号的频率和相位可调整。
19、可选的,所述旋变仿真的控制方法还包括:
20、直接数字频率合成器dds3后端接数模转换器dac2,可编程逻辑器件fpga6设置数模转换器dac2的放大倍数,实现了旋变仿真输出信号的幅值可调整。
21、可选的,所述旋变仿真的控制方法还包括:
22、数模转换器dac2后端接变压器1,实现了旋变仿真输出信号隔离输出,并且增大驱动能力、扩展电压范围。
23、根据本申请实施例的一个方面,提供了一种旋变仿真的控制装置,包括:
24、获取模块,用于获取旋变仿真输出的状态;
25、静态模块,用于在旋变仿真输出处于静态时,获取上位机发送设置的值、激励电压值vexc、变比k,计算得到正弦通道、余弦通道分别需要设置的电压值vsin、vcos值;
26、动态模块,用于在旋变仿真输出处于动态时,上位机发送设置的载波频率值f、激励电压值vexc、变比k;可编程逻辑器件fpga6设置数模转换器dac2,使得正弦通道、余弦通道的数模转换器dac2输出的幅值变化分别满足正弦和余弦的波形要求。
27、根据本申请实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例中所述的旋变仿真的控制方法。
28、根据本申请实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述实施例中所述的旋变仿真的控制方法。
29、根据本申请实施例的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述实施例中提供的旋变仿真的控制方法。
30、在本申请的一些实施例所提供的技术方案中,获取旋变仿真输出的状态;在旋变仿真输出处于静态时,获取上位机发送设置的值、激励电压值vexc、变比k,计算得到正弦通道、余弦通道分别需要设置的电压值vsin、vcos值;在旋变仿真输出处于动态时,上位机发送设置的载波频率值f、激励电压值vexc、变比k;可编程逻辑器件fpga6设置数模转换器dac2,使得正弦通道、余弦通道的数模转换器dac2输出的幅值变化分别满足正弦和余弦的波形要求,此时,针对旋变仿真输出在静态和动态均进行把控,以便于在不同状态下采用对应的控制逻辑,从而保证了旋变仿真输出信号的高性能指标,以便于对旋变传感器信号精确、快速的仿真输出。
31、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种旋变仿真的控制方法,其特征在于,包括:
2.根据权利要求1所述的旋变仿真的控制方法,其特征在于,所述在旋变仿真输出处于静态时,获取上位机发送设置的值、激励电压值vexc、变比k,计算得到正弦通道、余弦通道分别需要设置的电压值vsin、vcos值,包括:
3.根据权利要求2所述的旋变仿真的控制方法,其特征在于,所述在旋变仿真输出处于静态时,获取上位机发送设置的值、激励电压值vexc、变比k,计算得到正弦通道、余弦通道分别需要设置的电压值vsin、vcos值,还包括:
4.根据权利要求3所述的旋变仿真的控制方法,其特征在于,所述在旋变仿真输出处于动态时,上位机发送设置的载波频率值f、激励电压值vexc、变比k;可编程逻辑器件fpga6设置数模转换器dac2,使得正弦通道、余弦通道的数模转换器dac2输出的幅值变化分别满足正弦和余弦的波形要求,包括:
5.根据权利要求2所述的旋变仿真的控制方法,其特征在于,所述在旋变仿真输出处于动态时,上位机发送设置的载波频率值f、激励电压值vexc、变比k;可编程逻辑器件fpga6设置数模转换器dac2,使得正弦通道、余弦通道的数模转换器dac2输出的幅值变化分别满足正弦和余弦的波形要求,还包括:
6.根据权利要求5所述的旋变仿真的控制方法,其特征在于,所述旋变仿真的控制方法还包括:
7.根据权利要求6所述的旋变仿真的控制方法,其特征在于,所述旋变仿真的控制方法还包括:
8.根据权利要求5所述的旋变仿真的控制方法,其特征在于,所述旋变仿真的控制方法还包括:
9.一种旋变仿真的控制装置,其特征在于,包括:
10.一种计算机可读介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8中任一项所述的旋变仿真的控制方法。
技术总结
本申请的实施例提供了一种旋变仿真的控制方法、装置、介质。该旋变仿真的控制方法包括:获取旋变仿真输出的状态;在旋变仿真输出处于静态时,获取上位机发送设置的值、激励电压值Vexc、变比K,计算得到正弦通道、余弦通道分别需要设置的电压值Vsin、Vcos值;在旋变仿真输出处于动态时,上位机发送设置的载波频率值f、激励电压值Vexc、变比K;可编程逻辑器件FPGA6设置数模转换器DAC2,使得正弦通道、余弦通道的数模转换器DAC2输出的幅值变化分别满足正弦和余弦的波形要求,此时,针对旋变仿真输出在静态和动态均进行把控,以便于在不同状态下采用对应的控制逻辑,从而保证了旋变仿真输出信号的高性能指标,以便于对旋变传感器信号精确、快速的仿真输出。
技术研发人员:丁力,薛利强,陆千里,卞立强,孔超,孙丹
受保护的技术使用者:南京新紫峰电子科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!