自降噪的旋翼无人机声探测控制方法与流程
本发明涉及声定向,具体涉及一种自降噪的旋翼无人机声探测控制方法。
背景技术:
1、利用麦克风阵列确定噪声源状态和方向的技术,已经应用于噪声污染监测、工业设备故障监测、目标状态识别与音源增强等领域。但在很多应用场景中,由于目标处于移动状态或不沿固定路径行进,需要麦克风阵列能够随目标移动或进行巡逻监听告警。由于无人机具备成本低、任务范围广、移动迅速、部署灵活等优点,可将麦克风阵列装置在无人机上进行声探测。但由于无人机运行过程中存在较强的自噪声,严重干扰声信号,因此声信号探测在无人机系统上的应用受到了极大的限制。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的自降噪的旋翼无人机声探测控制方法通过无人机在空中短暂停机创造监听窗口期,可以获取高信噪比声信号。
2、为了达到上述发明目的,本发明采用的技术方案为:
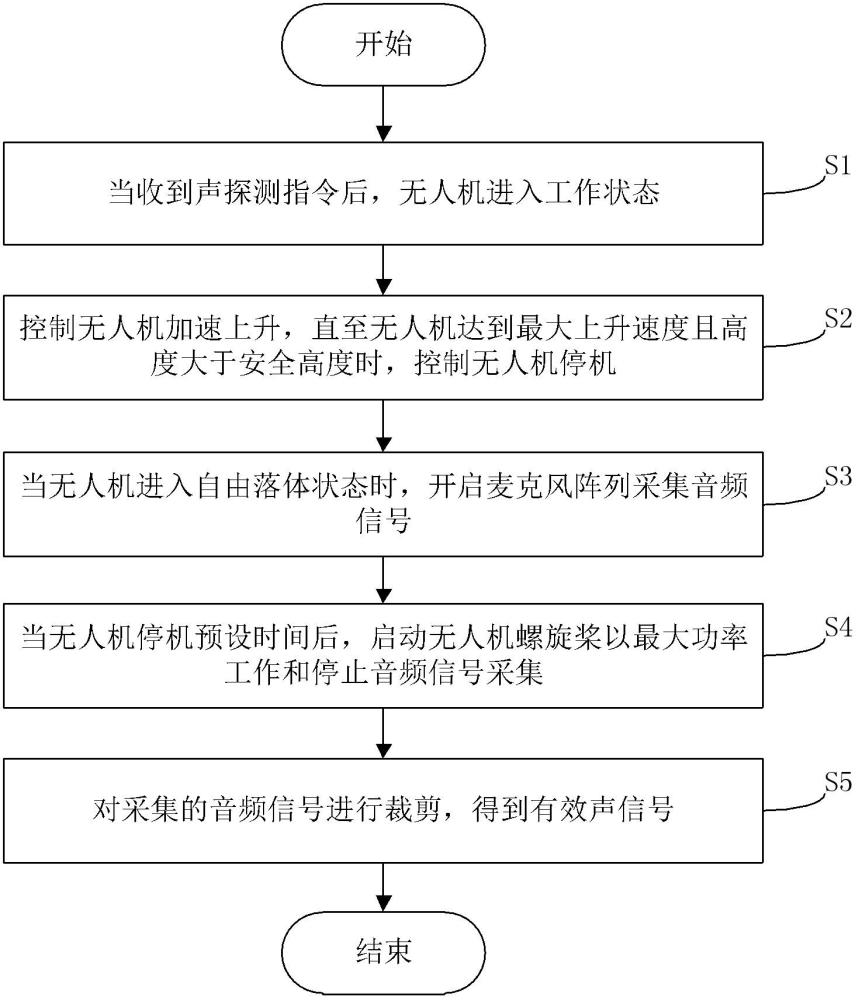
3、提供一种自降噪的旋翼无人机声探测控制方法,其包括步骤:
4、s1、当收到声源定向指令后,无人机进入工作状态;
5、s2、控制无人机加速上升,直至无人机达到最大上升速度且高度大于安全高度时,控制无人机停机;
6、s3、当无人机进入自由落体状态时,开启麦克风阵列采集音频信号;
7、s4、当无人机停机达到预设时间后,启动无人机螺旋桨以最大功率工作和停止音频信号采集;
8、s5、对采集的音频信号进行裁剪,得到有效声信号。
9、进一步地,最大上升速度的获取方法包括:
10、根据气压传感器采集的气压和当地地面气压,计算无人机平均垂向速度:
11、
12、
13、其中,为时间间隔内的平均垂向速度;为时间间隔内的测试点的数量;为测试点间的时间间隔;为第个测试点处的高度,∈[0,-1];为当地地面气压;为第 n个测试点处的大气压强;
14、当平均垂向速度在连续多个时间间隔 t内均保持在预设比例内的变化幅度时,则无人机达到最大上升速度。
15、上述技术方案的有益效果为:通过高度信号近似计算短时间内的平均垂向速度,避免了使用昂贵的空速管,降低了声音探测目标的成本及复杂度。
16、进一步地,所述安全高度的计算方法包括:
17、将安全高度计算划分为三个阶段,三个阶段的整个飞行过程耗时设为 t,分别计算无人机经历三个阶段的时间:
18、
19、
20、其中,为无人机达到最大垂向上升速度并停机后的停机时间;为通过试验获取的无人机重启到螺旋桨达到最大转速的时间;为无人机螺旋桨达到最大转速并减速停止的时间;无人机的最大升力;
21、为无人机整机质量;为重力加速度;为无人机的最大上升速度;为根据项目实际情况确定需要的有效声信号的时间长度;和分别为通过试验获取声压级减小和增大到额定值的时间;
22、安全高度需满足以下条件:
23、
24、其中,为下落高度;、分别为在阶段、阶段和阶段内无人机高度的变化量;
25、根据三个时间阶段对应的无人机动力学模型,通过欧拉法解算得到每个阶段的高度,三个时间阶段的无人机动力学模型分别为:
26、
27、
28、
29、其中,为无人机在垂直方向的加速度分量;为无人机在垂直方向上的速度分量;为垂直方向上的阻力系数;为取符号函数;为无人机螺旋桨提供的升力;为螺旋桨可提供的最大升力。
30、进一步地,通过欧拉法解算得到每个阶段的高度的方法包括:
31、在阶段对应的动力学方程中,忽略,则和阶段内对应的动力学模型均可如下表示:
32、
33、对阶段的动力学模型的微分方程使用有限差分法,转化为以下差分方程:
34、
35、其中,、分别为第个点处垂直方向的速度与位移值;和分别为第个点处垂直方向的速度与位移值;为差分的时间步长;
36、通过阶段的差分方程计算任意时刻的高度值,其中初始值设置为:,,且,;、分别为阶段的结束时间和开始时间对应的高度值;和分别为阶段的结束时间和开始时间对应的高度值;
37、对阶段的动力学模型的微分方程使用有限差分法,转化为以下差分方程:
38、
39、通过阶段的差分方程计算任意时刻的高度值,且,和分别为阶段的结束时间和开始时间对应的高度值。
40、上述技术方案的有益效果为:本方案通过无人机动力学模型建立无人机高度变化预测模型,并通过近似处理的方法估算总体时间,最终由数值计算的欧拉法解算模型,计算获得安全高度,通过该种方式可以保证无人机有足够的时间获取高信噪比声信号,同时还能保证无人机下落过程中的安全性。
41、进一步地,对采集的音频信号进行裁剪的方法为:
42、计算音频信号声压级,记录无人机停机后声压级降到最高干扰噪声声压级的时间;记录无人机重启后声压级升高到最高干扰噪声声压级的时间;从整个采集的音频信号中截取至的声信号,作为有效声信号。
43、结合声压级进行音频信号的截取可以降低噪声对声信号的干扰,提高采集的声信号的质量。
44、进一步地,计算音频信号声压级的表达式为:
45、,
46、其中,为音频信号;为参考声压;为待测声压的有效值; x为声信号的采样点; k为声信号离散点数; k为声信号离散点变量。
47、进一步地,阻力系数的表达式为:
48、
49、其中,为无人机的最大上升速度。
50、本发明的有益效果:无人机通过在短时间内主动停机,以创造无自噪声窗口期,麦克风在窗口期内获取高信噪比的声信号;通过该种方式进行声信号获取,相比于现有技术直接在无人机上使用麦克风进行声信号采集、声源定向,降低了无人机自身噪声的影响,可获得更高信噪比的目标声信号,以此提高声纹识别、声源定向的准确性。
51、本方案的无人机在停机前的控制,可使无人机在停机前拥有向上的初速度,延长无人机自由下落的时间,使麦克风监听的时间更长,获得更长的高信噪比音频信号。
技术特征:
1.自降噪的旋翼无人机声探测控制方法,其特征在于,包括步骤:
2.根据权利要求1所述的自降噪的旋翼无人机声探测控制方法,其特征在于,最大上升速度的获取方法包括:
3.根据权利要求1所述的自降噪的旋翼无人机声探测控制方法,其特征在于,所述安全高度的计算方法包括:
4.根据权利要求3所述的自降噪的旋翼无人机声探测控制方法,其特征在于,通过欧拉法解算得到每个阶段的高度的方法包括:
5.根据权利要求1所述的自降噪的旋翼无人机声探测控制方法,其特征在于,对采集的音频信号进行裁剪的方法为:
6.根据权利要求5所述的自降噪的旋翼无人机声探测控制方法,其特征在于,计算音频信号声压级的表达式为:
7.根据权利要求3所述的自降噪的旋翼无人机声探测控制方法,其特征在于,阻力系数的表达式为:
技术总结
本发明公开了一种自降噪的旋翼无人机声探测控制方法,属于声定向技术领域,该方法包括当收到声源定向指令后,无人机进入工作状态;控制无人机加速上升,直至无人机达到最大上升速度且高度大于安全高度时,控制无人机停机;当无人机进入自由落体状态时,开启麦克风阵列采集音频信号;当无人机停机预设时间后,启动无人机螺旋桨以最大功率工作和停止音频信号采集;对采集的音频信号进行裁剪,得到有效声信号。
技术研发人员:张鹏,赵鑫,陈柯,李相志,孙精宇
受保护的技术使用者:成都凯天电子股份有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!