基于智慧农业多机协同的自主种植系统、设备及存储介质
本发明实施例涉及农业种植,尤其涉及一种基于智慧农业多机协同的自主种植系统、设备及存储介质。
背景技术:
1、现有传统农业种植生产方式存在诸多问题,如资源浪费、劳动密集度高、生产效率低下等,同时也面临着巨大的挑战,如人口增长、土地有限性、气候变化等。
2、智慧农业技术是指利用先进的信息技术、传感技术、通信技术和自动化技术,以及大数据分析、人工智能等技术手段,对农业种植生产的各个环节进行智能化、精细化管理和运营的技术。通过智慧农业技术的应用,农民可以更科学、更智能地进行农业种植生产,从而实现可持续发展和农业现代化。
3、多机协同技术是指利用先进的信息技术、通信技术和控制技术,实现多台农业机械设备之间的协同作业和协同控制。多机协同技术在智慧农业中具有极大的实际应用价值。自主农机的协同作业能力如通过自主驾驶农机之间的通信和协调实现高效的种植、施肥和灌溉等操作。
4、而如何将智慧农业技术和多机协同技术有效地应用到农业种植中成为亟待解决的技术问题。
技术实现思路
1、有鉴于此,本发明实施例提供一种基于智慧农业多机协同的自主种植系统、设备及存储介质,以至少部分解决上述问题。
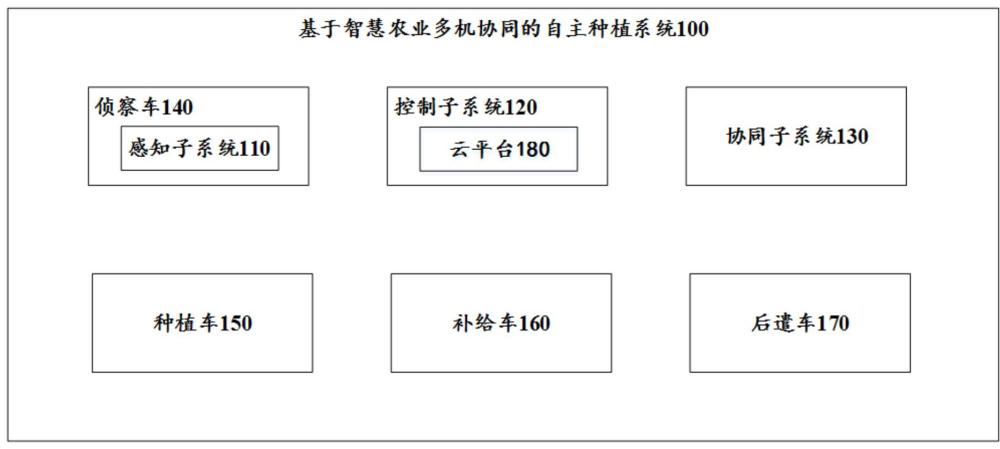
2、根据本发明实施例的第一方面,提供了一种基于智慧农业多机协同的自主种植系统,包括感知子系统、控制子系统、协同子系统、侦察车、种植车、补给车、后遣车及云平台;其中,所述感知子系统由所述侦察车搭载,所述感知子系统用于获取并传输感知数据至所述控制子系统;所述云平台设置在所述控制子系统中,用于根据接收的所述感知数据进行种植路径的规划并基于规划完成的种植路径对所述种植车、所述补给车及所述后遣车进行统一调度和控制,以完成植物的种植,其中所述云平台根据接收的所述感知数据进行种植路径的规划,包括:基于边界图像,确定种植地的可种植范围;从预设起点开始,在所述可种植范围内进行随机采样,得到采样点,所述采样点用于路径探索;对所述采样点进行碰撞检测,将与所述采样点距离最近且与所述采样点无障碍连接的点确定为生成点,所述生成点的搜索方向指向无碰撞区域;判断所述生成点与预设目标点的距离是否满足预设距离阈值,若满足所述预设距离阈值,则将所述预设起点、所述采样点、所述生成点及所述预设目标点依次连接,得到无碰撞种植轨迹;根据从所述无碰撞种植轨迹中选择的离散点计算三次样条插值函数的参数,所述离散点包括位置信息、时间信息及速度信息;根据所述三次样条插值函数的参数对所述无碰撞种植轨迹进行插值,生成平滑路径;将所述平滑路径确定为所述规划完成的种植路径;所述协同子系统包括无线通信模块,用于实现所述感知子系统、所述控制子系统、所述侦察车、所述种植车、所述补给车、所述后遣车及所述云平台之间的互相通信。
3、在一种实现方式中,所述感知子系统包括环境监测模块,所述环境检测模块包括:图像采集单元,用于获取种植地的边界图像;视觉识别单元,用于识别所述种植地中的障碍物;种植温湿度检测单元,用于检测所述种植地的种植温湿度;种植酸碱度检测单元,用于检测所述种植地的种植酸碱度;种植肥效检测单元,用于检测所述种植地的种植肥效;种植水分检测单元,用于检测所述种植地的种植水分;其中,所述感知数据包括所述边界图像、所述障碍物、所述种植温湿度、所述种植酸碱度、所述种植肥效及所述种植水分。
4、在另一种实现方式中,所述图像采集单元包括二维rgb相机,所述视觉识别单元包括多线激光雷达。
5、在另一种实现方式中,所述基于规划完成的种植路径对所述种植车、所述补给车及所述后遣车进行统一调度和控制,以完成植物的种植,包括以下步骤:所述云平台将所述规划完成的种植路径和种植指令下发至所述种植车并接收所述种植车每次种植完成后传回的种植数据,所述种植数据包括种植苗数、施肥量及浇水量;所述云平台分析所述种植数据,确定需扶苗修正的植物信息并将所述需扶苗修正的植物信息下发至所述后遣车,以便所述后遣车进行扶苗修正;所述云平台监测所述种植车的水肥剩余信息,当剩余水肥量低于预设剩余水肥量阈值时,所述云平台派遣所述补给车对所述种植车进行补给。
6、在另一种实现方式中,所述无线通信模块采用sx1262无线通信模组,所述sx1262无线通信模组连接运营商网络用于远程传输信号。
7、在另一种实现方式中,所述协同子系统还包括训练模块,所述训练模块用于对所述侦察车、所述种植车、所述补给车及所述后遣车进行协同训练。
8、根据本发明实施例的第二方面,提供了一种设备,包括处理器、存储程序的存储器。其中,程序包括指令,指令在由处理器执行时使处理器执行如第一方面所述的系统所执行的步骤。
9、根据本发明实施例的第三方面,提供了一种计算机存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的系统所执行的步骤。
10、综上,在本发明实施例的方案中,通过感知子系统获取并传输感知数据,通过设置在控制子系统中云平台进行种植路径的规划并基于规划完成的种植路径对种植车、补给车及后遣车进行统一调度和控制,以完成植物的种植;通过协同子系统实现感知子系统、控制子系统、侦察车、种植车、补给车、后遣车及云平台之间的互相通信,本发明将智慧农业技术和多机协同技术有效地应用到农业种植中,提高了生产效率、资源利用率并降低了人力成本。
技术特征:
1.一种基于智慧农业多机协同的自主种植系统,其特征在于,包括感知子系统、控制子系统、协同子系统、侦察车、种植车、补给车、后遣车及云平台;
2.根据权利要求1所述的系统,其特征在于,所述感知子系统包括环境监测模块,所述环境检测模块包括:
3.根据权利要求2所述的系统,其特征在于,所述图像采集单元包括二维rgb相机,所述视觉识别单元包括多线激光雷达。
4.根据权利要求1所述的系统,其特征在于,所述基于规划完成的种植路径对所述种植车、所述补给车及所述后遣车进行统一调度和控制,以完成植物的种植,包括以下步骤:
5.根据权利要求1所述的系统,其特征在于,所述无线通信模块采用sx1262无线通信模组,所述sx1262无线通信模组连接运营商网络用于远程传输信号。
6.根据权利要求1所述的系统,其特征在于,所述协同子系统还包括训练模块,所述训练模块用于对所述侦察车、所述种植车、所述补给车及所述后遣车进行协同训练。
7.一种设备,其特征在于,包括:
8.一种计算机存储介质,其特征在于,其上存储有计算机程序,该程序被处理器执行时实现根据权利要求1-6中任一项所述的系统所执行的步骤。
技术总结
本发明实施例提供了一种基于智慧农业多机协同的自主种植系统、设备及存储介质。该系统包括感知子系统、控制子系统、协同子系统、侦察车、种植车、补给车、后遣车及云平台;感知子系统由侦察车搭载,感知子系统用于获取并传输感知数据至控制子系统;云平台设置在控制子系统中,用于根据接收的感知数据进行种植路径的规划并基于规划完成的种植路径对种植车、补给车及后遣车进行统一调度和控制,以完成植物的种植;协同子系统包括无线通信模块,用于实现感知子系统、控制子系统、侦察车、种植车、补给车、后遣车及云平台之间的互相通信。本发明将智慧农业技术和多机协同技术有效地应用到农业种植中,提高了生产效率、资源利用率并降低了人力成本。
技术研发人员:黄岩军,张昊博,王俊杰,庄仲元
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!