基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法
本发明属于光伏水泵控制,尤其是涉及基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法。
背景技术:
1、光伏水泵控制的控制目标是实现太阳能电池板的最大功率输出,使光伏水泵工作在扬程最大,流量最大的工作状态。常见的光伏水泵控制方法有pid控制,但其抗干扰能力弱、自适应能力差,超调量大,稳定性差,难以消除稳态误差。尤其在复杂恶劣环境下,太阳光急剧变化的情况下,往往不能稳定的工作在最大功率点跟踪(mppt),改进自抗扰控制器是通过估计补偿不确定影响的一种新型控制算法,该算法无需确定未知外部干扰模型或测量未知外部干扰量即可解决外部干扰问题;引入遗传变异结合粒子群优化的策略,对自抗扰控制器控制器参数进行全局参数和功率点寻优,进一步提高了系统的控制品质和控制精度,尤其在复杂恶劣环境下,具有精度高、误差小、抗干扰能力强等优越性。
技术实现思路
1、本发明的目的是提供一种基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,解决现有技术存在的常见的跟踪控制方法抗干扰能力弱、自适应能力差,超调量大,稳定性差,难以消除稳态误差,精准度差的问题。
2、为实现上述目的,本发明提供基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,包括以下步骤:
3、步骤1、利用实验方法获取光伏太阳能水泵的改进型自抗扰控制器中的跟踪-微分器模型和扩张状态观测器模型的整定参数;
4、步骤2、待跟踪-微分器和扩张状态观测器调整结束后,结合非线性状态误差反馈控制律对改进型自抗扰控制器进行整体参数整定;
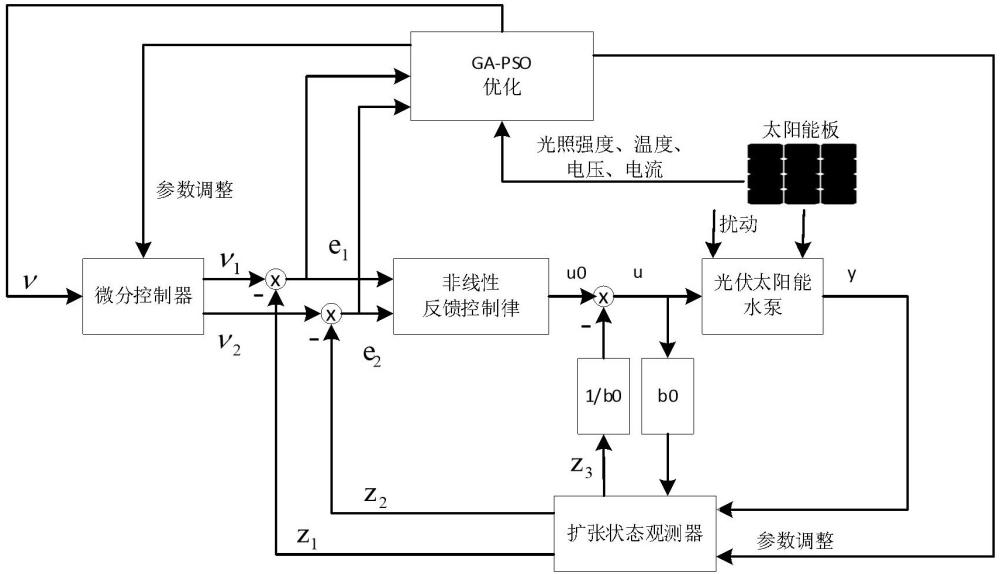
5、步骤3、将改进型自抗扰控制器引入基于功率跟踪的光伏太阳能水泵控制器中,采用扩张状态观测器eso对光伏太阳能水泵在运行过程中受到的干扰进行观测及补偿,同时引入遗传变异结合粒子群优化ga-pso的策略,对改进型自抗扰控制器参数进行全局寻优并进行功率点寻优,达到精确期望的最大功率点运行状态。
6、优选的,通过光照递进实验来获取光伏太阳能水泵的改进型自抗扰控制器中的跟踪-微分器模型和扩张状态观测器模型的整定参数,且使用光照递进实验过程中的数据进行遗传变异结合粒子群优化模型的训练。
7、优选的,光照递进实验过程中的数据包括光照强度、温度、电压、电流。
8、优选的,光伏太阳能水泵包括光伏太阳能板、水泵、控制器、温度传感器和数据采集系统。
9、优选的,步骤1中跟踪-微分器模型的建立如下:
10、;
11、为输入信号光伏太阳能水泵转速v的跟踪输出,为的微分信号,为采样周期,参数为速度因子,决定信号的跟踪速度,与跟踪速度呈正相关;参数为滤波因子,与滤波效果呈正相关,当增大时跟踪信号的相位损失随之增加,滤波因子的取值取决于速度因子r的大小,二者负相关且作为外部调整参数,不参与参数寻优过程,由系统特性根据经验确定;fhan()为最速函数,能够在不发生超调的前提下合理的安排输入信号的过渡过程,表示中间变量,k为对连续时间t进行离散化之后的数字序列,取值范围为0,1,2,...n。
12、优选的,步骤1中扩张状态观测器模型的建立如下:
13、;
14、其中和分别为和的观测值,为观测的扰动值;为光伏太阳能水泵实际转速输出;和分别为和观测值的微分值,观测扰动值的微分值;为的观测值与光伏太阳能水泵实际转速输出的差值;为光伏太阳能水泵的控制输入;参数是决定补偿强弱的“补偿因子”;为fal()函数线性段的区间长度,取得过大时,扩张状态观测器模型仅工作在线性区;取得过小时,出现颤振现象;,,三个参数为扩张状态观测器的反馈增益,使用遗传变异结合粒子群优化算法对,,优化;函数fal()为非线性函数,具有小误差大增益,具体表达式如下:
15、;
16、为的观测值与光伏太阳能水泵实际转速输出的差值,a为常数,在0-1之间,a越小响应越快,噪声会大;为fal()函数线性段的区间长度,设在5倍和10倍采样周期之间;sgn()为符合函数,变量不小于0时函数值为1,变量小于0时函数值为-1;扩张状态观测器作为自抗扰控制器adrc的核心对状态内外扰动进行实时的估计并补偿,对未知的扰动及不确定的因素进行“积分串联”处理,得到近似线性化。
17、优选的,步骤2中非线性状态误差反馈控制律模型的建立如下:
18、;
19、其中,为误差信号;为误差微分信号;,,,,为可调参数,为非线性状态误差反馈控制律的输出信号。
20、优选的,步骤3的具体过程如下:
21、s31、在设定的光照和温度条件下,根据光照递进实验的结果,获取光伏太阳能水泵的转速v、扩张状态观测器中的,,和非线性状态误差反馈控制律中的,的变化范围;
22、s32、确定最小目标函数j,具体表达式如下:
23、;
24、其中,mp表示超调量;p表示功率,为的观测值与光伏太阳能水泵实际转速输出的差值;
25、s33、对遗传变异结合粒子群优化模型中的参数进行初始化,包括粒子群规模、迭代次数、惯性权重、迭代步长;
26、s34、计算个体粒子水泵设定转速v、扩张状态观测器中的,,和非线性状态误差反馈控制律中的,的适应度1/j,进行交叉操作和变异操作,更新粒子的历史最优和当前数值;
27、s35、更新迭代次数;
28、s36、判断更新的迭代次数是否到达阀值或计算个体粒子适应度是否达到收敛。若大于或达到收敛则执行s37;否则返回执行s34;
29、s37、输出最优的光伏太阳能水泵转速v、扩张状态观测器中的,,和非线性状态误差反馈控制律中的,的值。
30、因此,本发明采用上述基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,具有以下优点:
31、(1)通过建立试验模型,对正常工况和极限工况下的光伏太阳能水泵系统进行试验数据采集(包含:光照强度、温度、电压、电流),对扩张状态观测器中的,,和非线性状态误差反馈控制律中的,进行综合优化,实现进行在线参数寻优自主调节,达到最优的控制效果;
32、(2)使用遗传算法变异结合粒子群优化(ga-pso)算法跟踪群体种类和样本最优粒子思想,结合自抗扰控制器较强的鲁棒性,实现功率点寻优,使系统在环境参数变化和负载扰动时,得到期望性能,达到精确期望的最大功率点运行状态,具有较强的鲁棒性。
33、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,其特征在于:通过光照递进实验来获取光伏太阳能水泵的改进型自抗扰控制器中的跟踪-微分器模型和扩张状态观测器模型的整定参数,且使用光照递进实验过程中的数据进行遗传变异结合粒子群优化模型的训练。
3.根据权利要求2所述的基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,其特征在于:光照递进实验过程中的数据包括光照强度、温度、电压、电流。
4.根据权利要求1所述的基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,其特征在于:光伏太阳能水泵包括光伏太阳能板、水泵、控制器、温度传感器和数据采集系统。
5.根据权利要求4所述的基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,其特征在于,步骤1中跟踪-微分器模型的建立如下:
6.根据权利要求5所述的基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,其特征在于,步骤1中扩张状态观测器模型的建立如下:
7.根据权利要求6所述的基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,其特征在于,步骤2中非线性状态误差反馈控制律模型的建立如下:
8.根据权利要求7所述的基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,其特征在于,步骤3的具体过程如下:
技术总结
本发明公开了基于改进自抗扰控制器的光伏水泵最大功率点跟踪方法,属于光伏水泵控制技术领域,包括以下步骤:步骤1、利用实验方法获取光伏太阳能水泵的改进型自抗扰控制器中的跟踪‑微分器模型和扩张状态观测器模型的整定参数;步骤2、待跟踪‑微分器和扩张状态观测器调整结束后,结合非线性状态误差反馈控制律对改进型自抗扰控制器进行整体参数整定;步骤3、将改进型自抗扰控制器引入基于功率跟踪的光伏太阳能水泵控制器中,采用扩张状态观测器ESO对光伏太阳能水泵在运行过程中受到的干扰进行观测及补偿,同时引入遗传变异结合粒子群优化GA‑PSO的策略,对改进型自抗扰控制器参数进行全局寻优并进行功率点寻优,达到精确期望的最大功率点运行状态。
技术研发人员:习嘉睿,董欣灿,胡军,杨阳
受保护的技术使用者:西北大学
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!