一种场景标记的方法和系统与流程
1.本发明涉及计算机技术领域、人工智能技术领域,具体涉及一种标记场景的方法和系统。
背景技术:
2.gps(global positioning system全球定位技术)经常只能返回2d的坐标信息,目前的很多场景描述方法都较笼统,本发明志在细化一种立体场景的较详细的标记方法,来完成对固态或较固定的立体的客观场景信息进行描述和收集,并能够支持较大范围的测绘、描述、存储。本发明的另一个特点是能够支持对立体的场景进行标记来指导导航信息或导航过程,以便于寻路或规划路径来导航。本发明的另一个特点是能够通过增加特征图片的方法来对场景增加能够较准确定位的标的物。
技术实现要素:
3.根据本公开的一个方面,一种场景标记的方法,其特征在于,包括:收集和创建场景的基础信息,用来描述场景的基本情况。
4.收集和创建场景或\和路面的通路信息,用来储存一块区域的通过规则。
5.收集和创建层信息,用来储存垂直叠加的一个层或一个层面的信息。
6.收集和创建联通信息,用来储存上述对象间连接关系的信息。
7.收集和创建特征图片信息,其中的特征图片是拍摄得到的图片,或印刷后用来张贴的图片或镭射图片,用以标记目标区域中的一个坐标和相关信息的用来识别的图像信息。
8.优选地,为场景创建边缘顶点信息,所述边缘顶点信息是相对于某坐标系原点的坐标或全球定位技术获取的坐标。
9.优选地,根据边缘顶点生成这个场景或者子场景的包容盒(包围盒)。
10.优选地,作为一种可选的实施方式,确定将一个区域划分成子场景的一种方式是根据这个区域的大小,当大小满足大于某一值时(1到100000000平米中的一个值,例如2平米),则可以将此连续的区域当成一个子场景。
11.优选地,作为一种可选的实施方式,确定将一个区域划分成子场景的一种方式是根据这个区域的大小和包容盒(包围盒)的形状(长宽比要小于某值且大于某值),当大小满足大于某一值且长宽比要小于某一值(例如10)且大于某一值(例如0.1),则可以将此连续的区域当成一个子场景。
12.优选地,作为一种可选的实施方式,可以在此场景的包容盒(包围盒)中选择一点(例如包容盒的中心点)来连接周围的顶点建立一个三角形集合或扇面集合。
13.优选地,作为一种可选的实施方式,可以在此场景的边缘顶点与此场景的包容盒的中心点的连线上,按照向中心点靠近或远离中心点的方向上,增加一个顶点(按照固定的距离或固定的线段长度比率,参照图1),用来与边缘顶点相连,以形成边缘缓冲区域以及获
得的边缘缓冲区域三角形列表或扇面列表。
14.优选地,作为一种可选的实施方式,可以在此场景的边缘顶点与对角线相连,按照向图形内部靠近的方向上,增加一个顶点(按照固定的距离或固定的线段长度比率,参照图4),用来与边缘顶点相连,以形成边缘缓冲区域以及获得的边缘缓冲区域三角形列表或扇面列表。
15.优选地,作为一种可选的实施方式,可以在此场景的边缘顶点与此场景的包容盒的中心点的连线上,按照向中心点靠近或远离中心点的方向上,增加一个顶点(按照固定的距离或固定的线段长度比率),用来与边缘顶点相连,以形成边缘缓冲区域以及获得的边缘缓冲区域三角形列表或扇面列表,可以参照图1所示意性的示出。
16.优选地,所述场景的基础信息中包含此场景的唯一id信息。
17.优选地,所述通路信息中包含通路的边缘顶点信息。
18.优选地,所述通路信息中包含通过性信息,可以是单向通过信息也可以是双向通过信息,可以是3d链路信息(3d点的连接集合,或理解成3d点的单向链表信息或3d点的双向链表)。
19.优选地,作为一种可选的实施方式,所述通过性信息可以是3d通过方向矢量、与3d通过方向矢量垂直的通过宽度矢量和通过高度矢量信息(共3个矢量)组成。
20.优选地,作为一种可选的实施方式,所述通过性信息可以是一个3d坐标和与此坐标处垂直于通过方向的通过宽度矢量和通过高度矢量信息(共2个矢量)组成。
21.优选地,所述通路信息中包含此路面信息的最大和最小通过速度。
22.优选地,所述通路信息中包含此路面信息的唯一id信息。
23.优选地,所述通路信息中包含包容盒信息。
24.优选地,每个所述层信息包含的信息可以有包容盒(包围盒)、此层信息的唯一id、边缘顶点信息。
25.优选地,每个所述层信息包含的信息可以有此层信息总共有多少层,此层信息所在的层(这个值可以是负数来表示地下)。
26.优选地,作为一种可选的实施方式,每个所述层信息可以包含的信息可以有此层信息的承载强度值或能够承载的强度类型。
27.优选地,所述联通信息是主要用来储存场景中逻辑对象(场景的基础信息、路面的通路信息、层信息、)之间的连接关系的信息。
28.优选地,所述联通信息中可以包含的此联通信息的唯一id信息、边缘顶点信息。
29.优选地,所述联通信息中可以包含与此联通信息连接的对象的列表,每个对每个连接的对象中增加一个类型来表示是场景、通路信息、层信息还是联通信息。
30.优选地,计算机设备及储存介质,其特点是能够储存信息。
31.优选地,作为一种可选的实施方式,可以将所述场景的全部标记信息储存在一个文件中,或一个文件夹下。
32.优选地,作为一种可选的实施方式,可以按照所述场景的各种信息类型来划分成不同的文件来分别储存。
33.优选地,作为一种可选的实施方式,可以在某个场景四周创建一个虚拟包容盒,将包容盒内部的所有场景或子场景或场景中的标记信息都储存在一个文件夹中,或同一个文
件中。
34.优选地,所述场景信息可以是其他信息的容器,也可以根据场景信息的包围盒从各种信息的储存列表或储存容器中检索得到此场景中包含的其他信息。
35.优选地,场景信息中可以划分出子场景信息。
36.优选地,作为一种可选的实施方式,可以对所述边缘顶点信息、通路信息、层信息、联通信息,增加一个数据类型或标识来区分开。
37.优选地,作为一种可选的实施方式,可以对所述边缘顶点信息、通路信息、层信息、联通信息,储存在不同的文件中以区分开。
38.所述边缘顶点是相对于某坐标系原点的坐标或全球定位技术获取的坐标,主要用于描述所诉场景的边缘。
39.可选地,路面信息和层信息的区别是:路面信息是水平面的信息,或者是认定成水平面的信息,层信息是在垂直方向上叠加或有重叠的信息。
40.优选地,所述唯一id是每个对象的唯一id。
41.优选地,作为一种可选的实施方式,在测量或\和制作坐标信息的时候,可以先按照一个局部坐标系的原点来收集各种坐标,之后用局部坐标系与全局坐标系的坐标的差异来修改此次收集到的坐标数据。
42.优选地,收集每个特征图片的中心点的坐标,做为此特征图片信息的坐标。
43.优选地,给每个特征图片创建一个唯一id。
44.优选地,将每个特征图片和其对应的唯一id储存到数据库中。
45.优选地,作为一种可选的实施方式,可以将每个特征图片对应的id储存到这个特征图片所在的场景、通路信息、层信息或联通信息中。
附图说明
46.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
47.图1示意性的示出一种边缘缓冲区域的选点位置确定方法或位置确定规律示意图,顶视图。
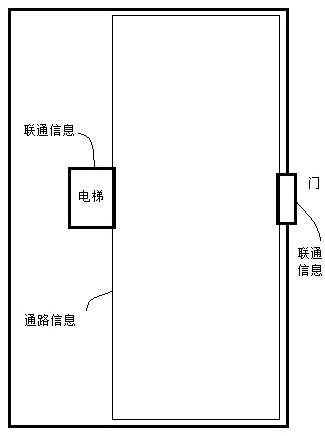
48.图2示意性的示出一种场景中包含的通路信息、联通信息的布局示意图,顶视图。
49.图3示意性的示出一种通路信息中坐标点和通过宽度矢量的示意图,顶视图。
50.图4示意性的示出另一种边缘缓冲区域的选点位置确定方法或位置确定规律示意图,顶视图。
具体实施方式
51.以下实施例用于说明本发明,但不用来限制本发明的范围。
52.实施例1步骤1:选取一块地方建立一个场景,这块地方可以是一个公司,首先选择一个点来做为此场景中局部坐标系的原点(例如左上角的围墙角是坐标原点),然后局部坐标系的轴向
与全局坐标系的轴向相同,然后通过测量来获得此场景的边缘顶点信息(列表信息),通过边缘顶点信息来得到一个包容盒信息,再为这个场景对象生成一个唯一id。
53.步骤2:在此场景中找到每个可以通过(车辆通过或者人通过)的地方,创建通路信息,创建每个通路信息的唯一id,收集边缘顶点信息(可以是列表信息),根据边缘顶点信息获得此通路信息的包容盒信息,获取通过性信息(选择通路中的一个点,测量这个点的相对坐标、通过高度矢量和通过宽度矢量,以获得的信息或信息列表)。
54.步骤3:在出现了楼层的地方,建立一个层信息,例如二楼的层信息包含这一层边缘顶点信息,包容盒,唯一id,这一层的层数(2),这个楼的总层数(例如33层),承载强度值(例如能够抗7级地震,就标记7,能够停直升飞机就标记100)。
55.步骤4:对能够联通到其他对象的地方(例如电梯或门,主要是电梯),建立一个联通信息,例如一个33层楼的电梯,收集此联通信息的边缘顶点信息(可以是列表信息),计算包围盒信息,连接的各种类型信息的列表(33层楼的信息,主要是唯一id和类型值,此处可以对各种类型比较一种类型值,例如场景信息是1,通过信息是2,层信息是3,联通信息是4,特征图片信息是5之类)。
56.步骤5:在场景中张贴或收集特征图片,收集每个特征图片的坐标,为每个特征图片创建一个唯一id,并将这个特征图片和其唯一id的对应储存到中数据库。
57.进一步地,作为一种可选的实施方式,可以将每个特征图片信息中的唯一id储存到这个特征图片所在的场景、通路信息、层信息或联通信息中。
58.步骤6:由于刚刚所有的坐标都是通过相对于局部坐标系的原点计算得到的,局部坐标系的轴向还与全局坐标系的轴向相同,则计算或测量局部坐标系原点的全局坐标系坐标,将这个坐标加上每个局部坐标就是得到了局部坐标向全局坐标的转换,这里也可以根据实际情况做调整。
59.步骤7:收集到这个场景的相关信息之后,按照之前的储存方式进行储存,如果是某一个区域(例如100公里的长宽或者说一万平方公里)单独储存在一台机器上,则按照当前场景信息所在的区域找到对应的存储介质来进行存储,储存时可以对此场景建立一个单独的文件夹,将每种类型的信息单独储存到一个文件中,也可以几种类型的信息储存到一个统一的文件中。
60.以上是本发明的具体实施方式,但本发明的保护范围不应局限于此。任何熟悉本领域的技术人员在本发明所揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内,因此本发明的保护范围应以权利要求书所限定的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1