一种面向架空输电线路作业到位监督的识别方法及系统与流程
[0001]
本发明涉及电力作业风险管控技术领域,尤其涉及一种面向架空输电线路作业到位监督的识别方法及系统。
背景技术:
[0002]
输电线路是电力系统的重要组成部分,按照dl/t1248-2013《架空输电线路状态检修导则》的相关规定,架空输电线路检修包括停电检修与不停电检修,并需要在实施检修项目时管控检修作业风险,严格落实组织措施、安全措施和技术措施。在输电线路检修的过程中,相应级别安全监督人员及各单位安全生产管理负责人(监督人员或负责人)应严格按照《安全职责到位衡量标准》深入作业现场开展到位监督,并通过实时监督作业人员,以确保安全措施得以全面、及时、有效的落实。在此基础上,如何灵活地判断架空输电线路检修作业是否脱离监管,是本发明需要解决的问题。
技术实现要素:
[0003]
本发明的目的在于克服现有技术的不足,本发明提供了一种面向架空输电线路作业到位监督的识别方法及系统,可通过仿生视觉模型识别人脸图像,判断人员与检修作业位置的间距,高效识别对架空输电线路检修作业的监管情况,有效控制现场检修人员的人身风险。
[0004]
为了解决上述问题,本发明提出了一种面向架空输电线路作业到位监督的识别方法,所述方法包括:
[0005]
通过图像采集设备采集输电线路检修作业现场附近的人脸信息与图像数据;
[0006]
基于所述人脸信息,判断所述输电线路检修作业现场附近是否有监督人员存在;
[0007]
在判断所述输电线路检修作业现场附近有监督人员存在后,基于所述图像数据获取所述监督人员与所述输电线路检修作业现场中心的实际距离;
[0008]
基于所述实际距离反馈所述监督人员的工作情况。
[0009]
可选的,所述人脸信息包括两眼间距、左眼坐标、右眼坐标、眼睛颜色、肤色和人脸特殊表征。
[0010]
可选的,在判断所述输电线路检修作业现场附近是否有监督人员存在之后,还包括:
[0011]
若判断所述输电线路检修作业现场附近未见监督人员,则生成所述监督人员未到岗的第一预警信息,并将所述第一预警信息上载至电网应急指挥中心。
[0012]
可选的,所述基于所述图像数据获取所述监督人员与所述输电线路检修作业现场中心的实际距离包括:
[0013]
获取所述图像采集设备中所包含的两台照相机之间的中心距离以及所述两台照相机中任意一台照相机的焦距;
[0014]
基于所述图像数据,获取所述监督人员在所述两台照相机中每一台照相机的感光
器成像点坐标信息,同时结合所述中心距离和所述焦距确定所述监督人员与所述输电线路检修作业现场中心的实际距离。
[0015]
可选的,所述基于所述实际距离反馈所述监督人员的工作情况包括:
[0016]
判断所述实际距离是否超过预设的安全监督距离;
[0017]
若是,则生成所述监督人员脱离监管的第二预警信息,并将所述第二预警信息上载至所述电网应急指挥中心;
[0018]
若否,则生成所述监督人员已到位的反馈信息,并将所述反馈信息上载至所述电网应急指挥中心。
[0019]
另外,本发明实施例还提供了一种面向架空输电线路作业到位监督的识别系统,所述系统包括:
[0020]
采集模块,用于通过图像采集设备采集输电线路检修作业现场附近的人脸信息与图像数据;
[0021]
判断模块,用于基于所述人脸信息,判断所述输电线路检修作业现场附近是否有监督人员存在;
[0022]
获取模块,用于在判断所述输电线路检修作业现场附近有监督人员存在后,基于所述图像数据获取所述监督人员与所述输电线路检修作业现场中心的实际距离;
[0023]
反馈模块,用于基于所述实际距离反馈所述监督人员的工作情况。
[0024]
可选的,所述人脸信息包括两眼间距、左眼坐标、右眼坐标、眼睛颜色、肤色和人脸特殊表征。
[0025]
可选的,所述判断模块还用于在判断所述输电线路检修作业现场附近未见监督人员之后,生成所述监督人员未到岗的第一预警信息,并将所述第一预警信息上载至电网应急指挥中心。
[0026]
可选的,所述获取模块用于获取所述图像采集设备中所包含的两台照相机之间的中心距离以及所述两台照相机中任意一台照相机的焦距;以及基于所述图像数据,获取所述监督人员在所述两台照相机中每一台照相机的感光器成像点坐标信息,同时结合所述中心距离和所述焦距确定所述监督人员与所述输电线路检修作业现场中心的实际距离。
[0027]
可选的,所述反馈模块用于判断所述实际距离是否超过预设的安全监督距离;若是,则生成所述监督人员脱离监管的第二预警信息,并将所述第二预警信息上载至所述电网应急指挥中心;若否,则生成所述监督人员已到位的反馈信息,并将所述反馈信息上载至所述电网应急指挥中心。
[0028]
在本发明实施例中,通过图像采集设备采集输电线路检修作业现场附近的实时情况,且以监督人员是否缺勤以及监督人员是否监管不力这两方面进行按序判断,可实现对架空输电线路检修作业监管情况的高效识别,有效地控制现场检修人员的人身风险,同时提高架空输电线路检修作业到位监督的执行水平。
附图说明
[0029]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以
根据这些附图获得其它的附图。
[0030]
图1是本发明实施例中的面向架空输电线路作业到位监督的控制系统的组成示意图;
[0031]
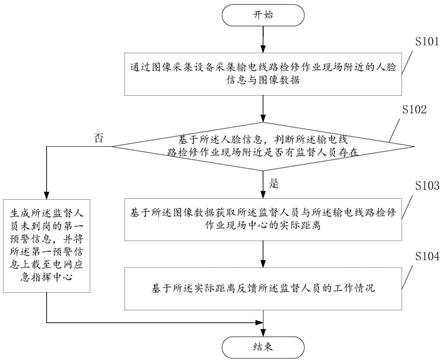
图2是本发明实施例中的面向架空输电线路作业到位监督的识别方法的流程示意图;
[0032]
图3是本发明实施例中的面向架空输电线路作业到位监督的控制系统的现场应用示意图;
[0033]
图4是本发明实施例中的监督人员与输电线路检修作业现场中心的实际距离求解原理图;
[0034]
图5是本发明实施例中的面向架空输电线路作业到位监督的识别系统的组成示意图。
具体实施方式
[0035]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0036]
请参阅图1,图1示出了本发明实施例中的面向架空输电线路作业到位监督的控制系统的组成示意图,所述控制系统包括多旋翼无人机、通信设备、地面监控设备和电网应急指挥中心,所述多旋翼无人机基于所述通信设备与所述地面监控设备相连接,所述地面监控设备基于所述通信设备与所述电网应急指挥中心相连接。
[0037]
其中,所述多旋翼无人机按照空机质量分类属于中型无人机,其质量处于7千克~116千克范围内,且所述多旋翼无人机上所搭载的所述图像采集设备包括两台1/2型1080p照相机,其符合gb/t364812018《信息技术场景记录仪通用规范》的相关规定,且所述两台1/2型1080p照相机中的任意一台照相机的镜头上行焦距为3.8毫米、镜头下行焦距为5.1毫米。
[0038]
其中,所述地面监控设备的内部采用nvidia生产的tegra parker系列的6核处理器作为主控制芯片,匹配8g字节的lpddr4型内存和32g字节容量的e mmc闪存,充当soc架构的边缘计算平台,具备高性能的数据处理能力,可满足所述控制系统的数据计算需求。
[0039]
其中,所述通信设备采用1.8吉赫兹频段的td-lte型无线通信基站,或者采用230兆赫兹频段的lte230型无线通信基站,作为所述控制系统中的连接中枢,主要实现所述多旋翼无人机、所述地面监控设备和所述电网应急指挥中心之间的信息传输功能。
[0040]
进一步的,所述控制系统按照dl/t 1482-2015《架空输电线路无人机巡检作业技术导则》的规定还设置有地面测控车辆,所述地面测控车辆与所述多旋翼无人机实现充电连接关系;所述地面测控车辆采用四轮驱动模式,可同时搭载两套多旋翼无人机在不同输电线路检修作业现场之间进行转移,并为这两套多旋翼无人机提供自动充电的便利。
[0041]
在本发明实施过程中,所述多旋翼无人机上搭载有图像采集设备,所述图像采集设备用于在所述多旋翼无人机处于悬停状态时采集输电线路检修作业现场附近的人脸信息与图像数据;所述通信设备用于将所述人脸信息与所述图像数据传输至所述地面监控设
备;所述地面监控设备用于基于所述人脸信息与所述图像数据获取监督人员与所述输电线路检修作业现场中心的实际距离,并基于所述实际距离确认所述监督人员的工作情况,并反馈至所述电网应急指挥中心完成信息登记。
[0042]
基于图1所提供的控制系统,图2示出了本发明实施例中的面向架空输电线路作业到位监督的识别方法的流程示意图,所述方法包括如下步骤:
[0043]
s101、通过图像采集设备采集输电线路检修作业现场附近的人脸信息与图像数据,其中所述人脸信息包括两眼间距、左眼坐标、右眼坐标、眼睛颜色、肤色和人脸特殊表征;
[0044]
在本发明实施例中,图3示出了本发明实施例中的面向架空输电线路作业到位监督的控制系统的现场应用示意图,所述电网应急指挥中心按照dlt 1248-2013《架空输电线路状态检修导则》的规定指派五名输电检修人员赴所述输电线路检修作业现场以开展检修作业,同时按照《安全职责到位衡量标准》的规定指派一名监督人员开展现场安全指导工作,其中一名输电检修人员负责按照dlt 1482-2015《架空输电线路无人机巡检作业技术导则》的规定,在所述多旋翼无人机处于适航状态时对其进行控制起飞。
[0045]
本发明实施过程包括:通过控制所述多旋翼无人机飞行至所述输电线路检修作业现场附近50米处且高于杆塔1米~2米的空域内,触发所述图像采集设备按照ga/t 1325-2017《安全防范人脸识别应用视频图像采集规范》的规定,对所述输电线路检修作业现场附近的人脸信息与图像数据进行采集,其中所述图像采集设备中所包含的两台照相机分别以图像识别矩形框的左上角为原点(x,y),且设置宽为w、高为h,分时段提取五张图像信息,以此构成所述图像数据。
[0046]
s102、基于所述人脸信息,判断所述输电线路检修作业现场附近是否有监督人员存在;
[0047]
在本发明实施例中,所述电网应急指挥中心的工程师在开展检修作业之前已通过webservice服务接口或者api二次开发接口将输电线路检修作业到位监督算法以及所述监督人员的人脸记录数据透过所述通信设备写入所述地面监控设备,其中所述人脸记录数据包括图像信息块、人脸信息块、图像数据块、特征数据块,且相应的数据格式均符合ga/t922.2《安防人脸识别应用系统》的规定。
[0048]
本发明实施过程包括:利用所述多旋翼无人机通过所述通信设备与所述地面监控设备的无线连接关系,所述地面监控设备可获取到所述人脸信息和所述图像数据,此时优先按照ga/t922.6《人脸识别算法评测方法》的规定,调用已存储的所述人脸记录数据对所述人脸信息进行识别匹配,判断所述输电线路检修作业现场附近是否有监督人员存在,其相应的判断结果为:若所述输电线路检修作业现场附近有监督人员存在,则继续执行步骤s103;若所述输电线路检修作业现场附近未有监督人员存在,则生成所述监督人员未到岗的第一预警信息,并将所述第一预警信息上载至电网应急指挥中心。
[0049]
s103、基于所述图像数据获取所述监督人员与所述输电线路检修作业现场中心的实际距离;
[0050]
本发明实施过程包括:获取所述图像采集设备中所包含的两台照相机之间的中心距离b以及所述两台照相机中任意一台照相机的焦距f;基于所述图像数据,获取所述监督人员在所述两台照相机中每一台照相机的感光器成像点坐标信息,同时结合所述中心距离
b和所述焦距f确定所述监督人员与所述输电线路检修作业现场中心的实际距离z为:
[0051][0052]
其中,设定所述监督人员的所在位置为p点,且p点落在所述两台照相机中每一台照相机的视距之内,并定义所述两台照相机分别为左照相机和右照相机,i
l
为p点在所述左照相机的感光器成像点坐标信息,i
r
为p点在所述右照相机的感光器成像点坐标信息。
[0053]
更具体地,结合图4所示出的监督人员与输电线路检修作业现场中心的实际距离求解原理图,其中l点为所述左照相机的光心,r点为所述右照相机的光心,i
l
至i
r
的距离为:d=b-(i
l-i
r
);
[0054]
根据相似三角形原理,可得到:
[0055][0056]
化简得到:
[0057][0058]
此外,结合所述图像数据中所包含的所述左照相机采集到的第一图像数据以及所述右照相机采集到的第二图像数据,可获取该步骤执行的前提条件包括:
[0059]
(1)通过获取所述左照相机的成像点相对于其摄像头光轴的距离o1以及所述右照相机的成像点相对于其摄像头光轴的距离o2,得到所述左照相机、所述右照相机在同一立体坐标系下所形成的视差为:d=o
1-o2,即所述左照相机与所述右照相机观察所述监督人员的方向差异;
[0060]
(2)设定所述左照相机和所述右照相机在同一立体坐标系的公共视场,此时p点在所述左照相机坐标系的公共视场空间点为p
l
=(x,y,z),p点在所述右照相机坐标系的公共视场空间点为p
r
=(x-b,y,z);
[0061]
(3)获取所述左照相机坐标系与所述立体坐标系的原点偏移量c
x
以及所述右照相机坐标系与所述立体坐标系的原点偏移量c
y
,从而得到所述第一图像数据所对应的平面特征点为p
l
=(x
l
,y
l
)以及所述第二图像数据所对应的平面特征点为p
r
=(x
r
,y
r
);
[0062]
(4)从matlab软件、scilab软件、octave软件、python软件等数学计算软件中择一对所述焦距f、所述中心距离b、所述原点偏移量c
x
和所述原点偏移量c
y
进行立体标定,以校正合并所述第一图像数据与所述第二图像数据,同时使得y
l
=y
r
(即共面对准);具体表现为:以所述左照相机的摄像头光心为原点建立所述立体坐标系,假设p点的坐标为(x,y,z),通过利用变换矩阵q可实现所述左照相机坐标系与所述右照相机坐标系到所述立体坐标系的映射关系为:
[0063]
[0064]
在此基础上,可将所述监督人员与所述输电线路检修作业现场中心的实际距离求解过程转移至所述立体坐标系上。
[0065]
此外,本发明实施例为提高对所述监督人员工作情况的管控,通过选取所述监督人员在不同时刻下的五个坐标点分别进行实际距离的运算,所述五个坐标点如下:
[0066][0067]
s104、基于所述实际距离反馈所述监督人员的工作情况。
[0068]
在本发明实施例中,由所述电网应急指挥中心设定安全监督距离为6米,此时判断所述实际距离z是否超过所述安全监督距离,其相应的判断结果为:若所述实际距离z超过所述安全监督距离,则生成所述监督人员脱离监管的第二预警信息,并将所述第二预警信息上载至所述电网应急指挥中心;若所述实际距离z未超过所述安全监督距离,则生成所述监督人员已到位的反馈信息,并将所述反馈信息上载至所述电网应急指挥中心。
[0069]
请参阅图5,图5示出了本发明实施例中的面向架空输电线路作业到位监督的识别系统的组成示意图,所述系统包括如下:
[0070]
采集模块201,用于通过图像采集设备采集输电线路检修作业现场附近的人脸信息与图像数据,其中所述人脸信息包括两眼间距、左眼坐标、右眼坐标、眼睛颜色、肤色和人脸特殊表征;
[0071]
判断模块202,用于基于所述人脸信息,判断所述输电线路检修作业现场附近是否有监督人员存在;
[0072]
具体的,所述判断模块202还用于在判断所述输电线路检修作业现场附近未见监督人员之后,生成所述监督人员未到岗的第一预警信息,并将所述第一预警信息上载至电网应急指挥中心。
[0073]
获取模块203,用于在判断所述输电线路检修作业现场附近有监督人员存在后,基于所述图像数据获取所述监督人员与所述输电线路检修作业现场中心的实际距离;
[0074]
具体的,所述获取模块203用于获取所述图像采集设备中所包含的两台照相机之间的中心距离以及所述两台照相机中任意一台照相机的焦距;以及基于所述图像数据,获取所述监督人员在所述两台照相机中每一台照相机的感光器成像点坐标信息,同时结合所述中心距离和所述焦距确定所述监督人员与所述输电线路检修作业现场中心的实际距离。
[0075]
反馈模块204,用于反馈基于所述实际距离对所述监督人员的工作情况。
[0076]
具体的,所述反馈模块204用于判断所述实际距离是否超过预设安全监督距离;若是,则生成所述监督人员脱离监管的第二预警信息,并将所述第二预警信息上载至所述电
网应急指挥中心;若否,则生成所述监督人员已到位的反馈信息,并将所述反馈信息上载至所述电网应急指挥中心。
[0077]
其中,所述系统被配置用于执行上述的面向架空输电线路作业到位监督的识别方法,针对所述系统中的各个模块的具体实施方式请参考图2所示出的方法流程图及具体实施内容,在此不再赘述。
[0078]
在本发明实施例中,通过图像采集设备采集输电线路检修作业现场附近的实时情况,且以监督人员是否缺勤以及监督人员是否监管不力这两方面进行按序判断,可实现对架空输电线路检修作业监管情况的高效识别,有效地控制现场检修人员的人身风险,同时提高架空输电线路检修作业到位监督的执行水平。
[0079]
本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器(rom,read only memory)、随机存取存储器(ram,random access memory)、磁盘或光盘等。
[0080]
以上对本发明实施例所提供的一种面向架空输电线路作业到位监督的识别方法及系统进行了详细介绍,本文中采用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1