一种基于梯度直方图特征的作物倒伏分级方法与流程
[0001]
本发明涉及农作物倒伏检测技术领域,具体涉及一种基于梯度直方图特征的作物倒伏分级方法。
背景技术:
[0002]
水稻作为我国主要的粮食和经济作物,在农业生产和实践中均占有重要的地位。尤其在中国,水稻的平均栽种面积、单产和总产情况均位居全国粮食作物的第二位,中国作为世界上水稻最大的生产国和消费国,保障水稻的高产显得尤为重要。倒伏是严重影响水稻产量和质量的重要胁迫因素,且水稻倒伏程度也严重影响机械化收割作业,给收割作业造成困难。因此,研究水稻作物倒伏评价方法或技术对我国粮食稳定生产有重要的价值和意义。
[0003]
作物倒伏检测平台根据其载具分为星载、机载表型平台、地面表型平台和无人机表型平台。除了人工检测技术外,现有的农作物倒伏检测中大部分为基于像素点的作物倒伏检测,即通过特征提取,在像素级别检测对应像素点的作物是否发生倒伏,然后通过计算发生倒伏的像素点占图像所有像素点的百分比得出倒伏发生率,但此方法容易受噪声影响,降低检测精度。随着人工智能和深度学习技术的发展,出现基于深度学习的农作物倒伏检测报道,以农作物种植小区图像为深度学习模型的输入,输出为判断该小区是否发生倒伏,输出结果分级简单,只有倒伏或没有倒伏两种结果,随后再计算整个大田倒伏发生率。
[0004]
综上,现有技术主要对作物大田是否发生倒伏进行检测,但是暂未有对大田倒伏严重程度进行分级评价的研究,因此,行业内需要一种能够智能识别大田作物不同倒伏程度的分级判别方法和技术。
技术实现要素:
[0005]
本发明的目的是为了克服以上现有技术存在的不足,提供了一种基于梯度直方图特征的作物倒伏分级方法,可用于生成大田倒伏严重程度的作物倒伏分级方法分布图。
[0006]
本发明的目的通过以下的技术方案实现:
[0007]
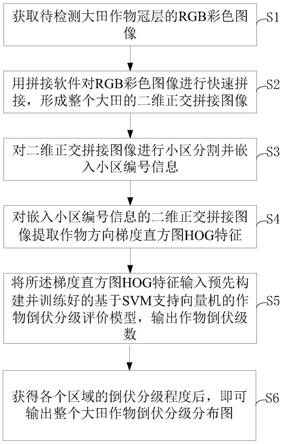
一种基于梯度直方图特征的作物倒伏分级方法,包括:
[0008]
s1,获取待检测大田作物冠层的rgb彩色图像;
[0009]
s2,用拼接软件对rgb彩色图像进行快速拼接,形成整个大田的二维正交拼接图像;
[0010]
s3,对二维正交拼接图像进行区域分割并嵌入区域编号信息;
[0011]
s4,对嵌入区域编号信息的二维正交拼接图像提取作物方向梯度直方图hog特征;
[0012]
s5,将所述梯度直方图hog特征输入预先构建并训练好的基于svm支持向量机的作物倒伏分级评价模型,输出作物倒伏级数;
[0013]
s6,获得各个区域的倒伏分级程度后,即可输出整个大田作物倒伏分级分布图。
[0014]
优选地,在步骤s1中,无人机搭载彩色相机拍摄待检测大田作物冠层的rgb彩色图
像。
[0015]
优选地,基于svm支持向量机的作物倒伏分级评价模型的构建方法包括:
[0016]
s51,获取试验田作物冠层的rgb彩色图像序列;
[0017]
s52,用拼接软件对rgb彩色图像序列进行快速拼接,形成整个大田的二维正交拼接图像;
[0018]
s53,对二维正交拼接图像进行种植区域分割并嵌入区域编号信息;
[0019]
s54,各个种植区域冠层的rgb图像提取作物方向梯度直方图hog特征;
[0020]
s55,对每个种植区域的作物倒伏程度进行人工评分;
[0021]
s56,建立初始的作物倒伏分级评价模型;
[0022]
s57,生成数据集:根据人工倒伏评分进行区间划分,把各个种植区域的hog特征按区间收集,将每个评分区间的hog特征随机分为训练集、验证集、测试集;
[0023]
s58,将训练集输入步骤s56中初始的作物倒伏分级评价模型进行训练,训练后将验证集代入训练好的作物倒伏分级评价模型中,通过调整作物倒伏分级评价模型参数,挑选出最高精度的模型作为最终模型;
[0024]
s59,将测试集输入最终模型进行评价,若符合评价标准的,则将该最终模型作为步骤s5中训练好的作物倒伏分级评价模型,若评价不符合标准的,则重新选择步骤s57-s58直至作物倒伏分级评价模型符合评价标准。
[0025]
优选地,步骤s52包括:将rgb彩色图像进行无畸变处理,校正由相机镜头引起的图像失真,获取无畸变图像序列;之后寻找相邻图像对之间的特征匹配点,同时地面控制点的gps准确测量值对匹配点的位置进行校正,确保重建冠层位置的精确度;基于关键的匹配点生成整个飞行区域的稠密三维点云,生成的二维拼接图像携带有每个重建点的颜色;重建的拼接图像涵盖了飞行区域内的整个场景。
[0026]
优选地,步骤s53包括:采用gps记录仪记录大田每个种植区域四个顶点的地理位置信息,通过再投影运算,寻找在拼接后图像载有相同地理位置信息,自动提取出种植区域的彩色图像,并根据地理位置对每个区域进行编号并记录。
[0027]
优选地,步骤s55中,对每个种植区域的作物倒伏程度进行人工评分包括:无人机载摄像机拍摄作物图像前后1-2天时间内,作物专家对每个种植区域水稻倒伏程度进行评分,在区域尺度上,如果有10%的作物倒伏,即给出10的倒伏分数,如果有50%的作物倒伏,即给出50的倒伏分数,如果没有发生倒伏,倒伏分数为0,以倒伏的百分比给出倒伏分数,分数越高,倒伏越严重,分数越低,倒伏程度越低。
[0028]
优选地,在步骤s57,在生成数据集时还包括:根据人工倒伏评分进行区间划分,把各个种植区域的hog特征按评分区间收集,每个区间70%的hog特征作为作物倒伏分级评价模型的训练集,15%作为验证集,剩余15%作为作物倒伏分级评价模型的测试集。
[0029]
优选地,在步骤s59中基于svm支持向量机的作物倒伏分级评价模型的评价标准采用正确率、精度、召回率3个指标计算公式:
[0030][0031]
[0032][0033]
式中:tp为正确检测倒伏分数区间的区域数量,fp为被错误检测倒伏分数区间数量,fn为被错误检测非倒伏分数区间的区域数量,tn为正确检测非倒伏分数区间的区域数量。
[0034]
优选地,svm评价标准中可以选用,正确率大于0.9,精度大于0.9,召回率大于0.85。
[0035]
本发明相对于现有技术具有如下优点:
[0036]
本发明基于无人机平台获取试验大田作物的二维正交拼接图像,通过软件开发全自动种植区域分割平台,种植区域分割平台对二维正交拼接图像进行种植区域分割并嵌入小区(区域)编号信息,并在小区尺度提取作物方向梯度直方图hog特征,结合人工给水稻种植小区倒伏程度的评分,选用svm支持向量机,建立作物倒伏分级评价模型,基于作物倒伏分级评价模型,将待检测大田划分区域,每个区域的hog特征向量输入构建的作物倒伏分级评价模型,模型即可输出区域作物倒伏级数,例如:轻度倒伏、中等倒伏、严重倒伏等。最后生成整个大田的倒伏程度的分布图,为后续机械收割作业提供指导分析。
附图说明
[0037]
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0038]
图1为本发明的基于梯度直方图特征的作物倒伏分级方法的流程示意图。
具体实施方式
[0039]
下面结合附图和实施例对本发明作进一步说明。
[0040]
本发明的一种基于梯度直方图特征的作物倒伏分级方法基于机器学习和无人机平台实现。在本实施例作物为水稻。在对待检测大田作物进行倒伏分级评价前,需要构建基于svm支持向量机的作物倒伏分级评价模型。在作物倒伏分级评价模型的基础上,参见图1,一种基于梯度直方图特征的作物倒伏分级方法,包括:
[0041]
s1,获取待检测大田作物冠层的rgb彩色图像;
[0042]
s2,用拼接软件对rgb彩色图像进行快速拼接,形成整个大田的二维正交拼接图像;
[0043]
s3,对二维正交拼接图像进行区域分割;
[0044]
s4,对每个区域彩色图像提取作物方向梯度直方图hog特征;
[0045]
s5,将所述梯度直方图hog特征输入预先构建并训练好的基于svm支持向量机的作物倒伏分级评价模型,输出作物倒伏级数。
[0046]
s6,获得各个区域的倒伏分级程度后,即可输出整个大田作物倒伏分级分布图。
[0047]
而基于svm支持向量机的作物倒伏分级评价模型的构建方法包括:
[0048]
s51,获取试验田作物冠层的rgb彩色图像序列;
[0049]
s52,用拼接软件对rgb彩色图像序列进行快速拼接,形成整个大田的二维正交拼接图像;
[0050]
s53,对二维正交拼接图像进行种植小区分割并嵌入小区编号信息;
[0051]
s54,各个种植小区冠层的rgb图像提取作物方向梯度直方图hog特征;
[0052]
s55,对每个种植小区的作物倒伏程度进行人工评分;
[0053]
s56,建立初始的作物倒伏分级评价模型;
[0054]
s57,生成数据集:根据人工倒伏评分进行区间划分,把各个种植小区的hog特征按区间收集,将每个评分区间的hog特征随机分为训练集、验证集、测试集;
[0055]
s58,将训练集输入步骤s56中初始的作物倒伏分级评价模型进行训练,训练后将验证集代入训练好的作物倒伏分级评价模型中,通过调整作物倒伏分级评价模型参数,挑选出最高精度的模型作为最终模型;
[0056]
s59,将测试集输入最终模型进行评价,若符合评价标准的,则将该最终模型作为步骤s5中训练好的作物倒伏分级评价模型,若评价不符合标准的,则重新选择步骤s57-s587直至作物倒伏分级评价模型符合评价标准。
[0057]
在每次无人机获取了大田图像序列后,选用商用图像处理软件pix4d mapper进行图像序列的拼接和三维重建。首先将原始图像进行无畸变处理,从而校正有相机镜头引起的图像失真获取无畸变图像序列,之后寻找相邻图像对之间的特征匹配点,在这一过程中地面控制点(gcp)的gps准确测量值对匹配点的位置进行校正,确保重建冠层位置的精确度。基于关键的匹配点生成整个飞行小区的稠密三维点云,最终生成的二维拼接图像携带有每个重建点的颜色。拼接图像涵盖了飞行小区内的整个场景。
[0058]
拼接图像涵盖了飞行小区内的整个场景,存在大量田间道路、建筑物等无用的信息,因此需要提取基于种植小区尺度的水稻彩色图像。用gps记录仪把大田每个种植小区四个顶点的地理位置信息均记录下来,通过再投影运算,寻找在拼接后图像载有相同地理位置信息,提取出种植小区尺度的彩色图像,并根据地理位置对每个小区进行编号并记录。
[0059]
在每次无人机采集大田图像前或后1-2天时间内,水稻专家会对每个种植小区水稻倒伏程度进行评分和记录,评分的准则是在小区尺度上作物倒伏的百分比给出倒伏分数,如果有10%的水稻作物倒伏,即给出10的倒伏分数,如果有50%的水稻作物倒伏,即给出50的倒伏分数,如果没有发生倒伏,倒伏分数为0,分数越高,倒伏越严重,分数越低,倒伏程度越低。因此每次无人机采集大田数据时,每个种植小区会有一个人工的倒伏评分。
[0060]
水稻作物试验田中,水稻种植在小区中,每个小区大小约2.5m
×
8m,不同小区的水稻实施不同种植模式。在水稻作物整个生长周期中,在不同生长时期采用无人机搭载高分辨率彩色相机对种植区进行大田图像数据采集,无人机自带gps定位系统可以获取图片序列的地理信息。
[0061]
在种植小区尺度上,提取作物冠层彩色图像的方向梯度直方图hog特征,hog特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部小区的梯度方向直方图来构成特征。hog特征提取步骤就是将一个每个小区冠层彩色图像:(1)灰度化(将图像看做一个x,y,z(灰度)的三维图像);(2)采用gamma校正法对输入图像进行颜色空间的标准化(归一化);目的是调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响,同时可以抑制噪音的干扰;(3)计算图像每个像素的梯度(包括大小和方向);主要是为了捕获轮廓信息,同时进一步弱化光照的干扰。(4)将图像划分成小细胞单元(cell,例如6
×
6像素/cell);(5)统计每个细胞单元cell的梯度直方图(不同梯度
的个数),即可形成每个细胞单元cell的描述子;(6)将一定数量的细胞单元cell组成一个区块block(例如3
×
3cells/block),一个区块block内所有细胞单元cell的特征描述子串联起来便得到该区块block的hog特征描述子。(7)将图像内的所有区块block特征描述子串联起来就可以得到图像的hog特征描述子。
[0062]
作为一个试验方案,hog特征提取中,单元细胞cell采用16像素
×
16像素,区块block采用5
×
5。把每个小区根据人工评价倒伏分数进行分区间,例如:0-30分为轻微倒伏、31-60分为中度倒伏、61-100分为严重倒伏,把所有高度特征向量按上述三种倒伏程度进行分组,每个分组的70%图片作为作物倒伏分级评价模型的训练集,15%作为验证集,剩余15%作为作物倒伏分级评价模型的测试集。每个种植小区图片提取的hog特征作为作物倒伏分级评价模型的特征输入向量,作物倒伏分级评价模型输出为小区所属的倒伏区间,对作物倒伏分级评价模型进行训练以实现不同种植小区倒伏程度的分级检测。
[0063]
hog特征提取中单元细胞cell和区块block可以采用不同大小,因此同一个种植小区可以提取多种不同的hog特征向量,在试验阶段,可以测试不同hog特征向量,然后挑选识别精度最大的一种特征向量即可。
[0064]
同理,检测倒伏分级区间可以根据实际需要进行选择,可以分为二级,即倒伏(0-50分)或没有倒伏(51-100分);可以分三级、四级、五级等,在svm建模时,把所有小区图片按上述倒伏分级程度进行分组,每个分组的70%图片作为作物倒伏分级评价模型的训练集,15%作为验证集,15%作为测试集,因此可以建立不同倒伏分级的评价模型,模型经过训练后可实现不同倒伏分级的预测。在不同小区样本量足够大的情况下,可以采用svm线性回归模型对作物小区的倒伏分数进行线性回归分析。
[0065]
基于svm支持向量机水稻倒伏分级的评价标准采用正确率、精度、召回率3个指标计算公式:
[0066][0067][0068][0069]
式中:tp为正确检测倒伏分数区间的小区数量,fp为被错误检测倒伏分数区间数量,fn为被错误检测非倒伏分数区间的小区数量,tn为正确检测非倒伏分数区间的小区数量。
[0070]
svm评价标准中可以选用,测试集的正确率大于0.9,精度大于0.9,召回率大于0.85。
[0071]
上述具体实施方式为本发明的优选实施例,并不能对本发明进行限定,其他的任何未背离本发明的技术方案而所做的改变或其它等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1