一种基于RFID与人脸识别技术的定位系统的制作方法
一种基于rfid与人脸识别技术的定位系统
技术领域
[0001]
本发明涉及定位领域,尤其涉及一种基于rfid与人脸识别技术的定位系统。
背景技术:
[0002]
随着我国经济的快速发展,隐藏在社会背后的一些深层次矛盾慢慢凸显出来:贫富两极分化严重加剧、弱势群体得不到照顾等诸多问题导致一些人挺而走险走上了犯罪的道路。这就使监狱的人数大为上升,给监狱的管理工作带来了巨大的挑战。而通过采用高科技技术手段,可以缓解监狱所面临的压力。
[0003]
rfid技术是一种新兴的自动识别技术。把rfid技术运用到监狱管理当中,可以实现远距离地对监狱人员进行识别与定位。这样就能掌握监狱内每一个受控区域内监狱人员的详细信息及数目。
[0004]
通过rfid技术对监狱人员进行识别与定位,本质是对rfid的标签进行识别与定位,并非对具体的人进行识别和定位。如果rfid的标签丢失或被偷盗,即标签和监狱人员不能对应起来的话,这样子就会造成错误定位。
技术实现要素:
[0005]
鉴于上述问题,本发明的目的在于提供一种基于rfid与人脸识别技术的定位系统及系统。
[0006]
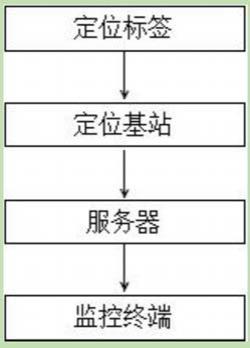
本发明提供了一种基于rfid与人脸识别技术的定位系统,其包括定位标签、定位基站、服务器和监控终端;
[0007]
所述定位标签设置在监狱人员身上,用于在接收到所述定位基站发送的激活信号后,向所述定位基站发送自身的标签信息;
[0008]
所述定位基站分布设置在监狱中,用于周期性地向其工作范围内发送激活信号以及将接收到的标签信息和定位基站自身的识别信息发送至所述服务器;
[0009]
所述服务器用于接收所述标签信息和识别信息,并将所述标签信息和识别信息发送至所述监控终端;
[0010]
所述监控终端用于根据所述标签信息和识别信息,获取所述监狱人员的定位图像,并判断所述标签信息和所述定位图像是否匹配,若否,则发出警报提示。
[0011]
优选地,所述定位系统还包括摄像机,所述摄像机分布设置在监狱中。
[0012]
优选地,所述根据所述标签信息和识别信息,获取所述监狱人员的定位图像,包括:
[0013]
所述监控终端根据所述标签信息和识别信息确定所述监狱人员的位置,并通过距离所述位置最近的摄像机对所述监狱人员进行拍照,获取所述监狱人员的定位图像。
[0014]
优选地,所述监狱人员包括服刑人员和警务人员,所述定位标签包括防拆定位手环和定位胸卡,所述防拆定位手环由所述服刑人员佩戴,所述定位胸卡由所述警务人员佩戴;所述定位基站包括壁挂型定位基站和吸顶型定位基站,所述壁挂型定位基站悬挂在监
狱的墙壁上,所述吸顶型定位基站悬挂在监狱的屋顶上。
[0015]
优选地,所述监控终端包括固定式监控终端和移动式监控终端;所述固定式监控终端包括设置在监控室的台式电脑,所述移动式监控终端包括警务人员的工作手机、工作平板电脑和工作笔记本电脑。
[0016]
优选地,所述定位标签为包含电池的主动式或半主动式定位标签。
[0017]
优选地,所述监控终端包括人脸数据库,所述人脸数据库用于存储监狱人员对应的定位标签的标签信息、定位基站的识别信息和监狱人员的脸部的特征信息;所述标签信息包括监狱人员的名字和标签编号,所述识别信息包括定位基站的编号和定位基站的位置。
[0018]
优选地,判断所述标签信息和所述定位图像是否匹配,包括:
[0019]
将定位图像中的监狱人员的脸部特征信息和人脸数据库中预存的监狱人员的特征信息进行匹配,确定定位图像中的监狱人员的名字;
[0020]
将定位图像中的监狱人员的名字与所述标签信息中包含的名字进行对比,判断两者是否一致,若是,则所述标签信息和所述定位图像互相匹配,若否,则所述标签信息和所述定位图像不匹配。
[0021]
优选地,根据所述标签信息和识别信息确定所述监狱人员的位置,包括:
[0022]
通过toa定位算法、tdoa定位算法或rssi定位算法确定定位标签的位置。
[0023]
优选地,所述监控终端还包括门禁管理单元和非法聚集报警单元;
[0024]
所述门禁管理单元用于在所述标签信息和所述定位图像互相匹配时,将监狱人员前方的门锁远程打开,并对所述门锁的打开时间和所述监狱人员的身份信息进行存储,得到门禁记录;
[0025]
所述非法聚集报警单元用于检测指定区域内的监狱人员的数量是否超过设定的阈值,若是,则发出报警提示;
[0026]
所述监狱人员的数量通过统计指定区域内定位标签的数量获得,或者是通过摄像机获取所述指定区域中的实时图像,并对所述实时图像进行人脸检测,通过统计人脸的数量获得。
[0027]
与现有技术相比,本发明的优点在于:
[0028]
通过rfid技术对监狱人员进行识别与定位,本质是对rfid的标签进行识别与定位,不能防止有人冒名顶替。如果rfid的标签丢失或被偷盗,落入服刑人员手中,监狱将面临巨大的风险。在采用rfid技术的同时,采用人脸识别二次复合认证,能更加有效的保证定位的准确性,避免冒名顶替,极大地提高门禁系统的安全性。
附图说明
[0029]
利用附图对本发明作进一步说明,但附图中的实施例不构成对本发明的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图。
[0030]
图1,为本发明一种基于rfid与人脸识别技术的定位系统的一种示例性实施例图。
具体实施方式
[0031]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0032]
本发明提供了一种基于rfid与人脸识别技术的定位系统,其包括定位标签、定位基站、服务器和监控终端;
[0033]
所述定位标签设置在监狱人员身上,用于在接收到所述定位基站发送的激活信号后,向所述定位基站发送自身的标签信息;
[0034]
所述定位基站分布设置在监狱中,用于周期性地向其工作范围内发送激活信号以及将接收到的标签信息和定位基站自身的识别信息发送至所述服务器;
[0035]
所述服务器用于接收所述标签信息和识别信息,并将所述标签信息和识别信息发送至所述监控终端;
[0036]
所述监控终端用于根据所述标签信息和识别信息,获取所述监狱人员的定位图像,并判断所述标签信息和所述定位图像是否匹配,若否,则发出警报提示。
[0037]
在一种实施例中,所述定位系统还包括摄像机,所述摄像机分布设置在监狱中。
[0038]
在一种实施例中,所述根据所述标签信息和识别信息,获取所述监狱人员的定位图像,包括:
[0039]
所述监控终端根据所述标签信息和识别信息确定所述监狱人员的位置,并通过距离所述位置最近的摄像机对所述监狱人员进行拍照,获取所述监狱人员的定位图像。
[0040]
在一种实施例中,所述监狱人员包括服刑人员和警务人员,所述定位标签包括防拆定位手环和定位胸卡,所述防拆定位手环由所述服刑人员佩戴,所述定位胸卡由所述警务人员佩戴;所述定位基站包括壁挂型定位基站和吸顶型定位基站,所述壁挂型定位基站悬挂在监狱的墙壁上,所述吸顶型定位基站悬挂在监狱的屋顶上。
[0041]
在一种实施例中,所述监控终端包括固定式监控终端和移动式监控终端;所述固定式监控终端包括设置在监控室的台式电脑,所述移动式监控终端包括警务人员的工作手机、工作平板电脑和工作笔记本电脑。
[0042]
在一种实施例中,所述定位标签为包含电池的主动式或半主动式定位标签。
[0043]
在一种实施例中,所述监控终端包括人脸数据库,所述人脸数据库用于存储监狱人员对应的定位标签的标签信息、定位基站的识别信息和监狱人员的脸部的特征信息;所述标签信息包括监狱人员的名字和标签编号,所述识别信息包括定位基站的编号和定位基站的位置。
[0044]
在一种实施例中,判断所述标签信息和所述定位图像是否匹配,包括:
[0045]
将定位图像中的监狱人员的脸部特征信息和人脸数据库中预存的监狱人员的特征信息进行匹配,确定定位图像中的监狱人员的名字;
[0046]
将定位图像中的监狱人员的名字与所述标签信息中包含的名字进行对比,判断两者是否一致,若是,则所述标签信息和所述定位图像互相匹配,若否,则所述标签信息和所述定位图像不匹配。
[0047]
在一种实施例中,根据所述标签信息和识别信息确定所述监狱人员的位置,包括:
[0048]
通过toa定位算法、tdoa定位算法或rssi定位算法确定定位标签的位置。
[0049]
在一种实施例中,所述监控终端还包括门禁管理单元和非法聚集报警单元;
[0050]
所述门禁管理单元用于在所述标签信息和所述定位图像互相匹配时,将监狱人员前方的门锁远程打开,并对所述门锁的打开时间和所述监狱人员的身份信息进行存储,得到门禁记录;
[0051]
所述非法聚集报警单元用于检测指定区域内的监狱人员的数量是否超过设定的阈值,若是,则发出报警提示;
[0052]
所述监狱人员的数量通过统计指定区域内定位标签的数量获得,或者是通过摄像机获取所述指定区域中的实时图像,并对所述实时图像进行人脸检测,通过统计人脸的数量获得。
[0053]
在一种实施例中,定位图像中的监狱人员的脸部特征信息通过如下方式获取:
[0054]
获取定位图像的拍摄条件;
[0055]
获取预先存储的,在所述拍摄条件下拍摄的背景图像,将所述背景图像记为bgp;
[0056]
对所述定位图像进行人脸检测,获得人脸区域图像;
[0057]
对人脸区域图像进行灰度化处理,获得灰度图像;
[0058]
对所述灰度图像进行降噪处理,获得降噪图像;
[0059]
获取所述降噪图像中包含的脸部特征信息。
[0060]
所述拍摄条件包括拍摄所述定位图像的摄像机的编号和所述摄像机的拍摄角度。
[0061]
在一种实施例中,对所述定位图像进行人脸检测,获得人脸区域图像,包括:
[0062]
将定位图像记为loacp,将loacp和bgp进行差分处理,获得定位图像中的运动物体区域图像movp;
[0063]
统计所述运动物体区域图像movp的像素点的行数movn,将所述运动区域图像movp平均划分为aves部分,每个部分包含行像素点,将aves部分从上到下进行编号,编号组成的集合为{1,2,3
…
,aves};
[0064]
获取编号为1的部分,所述部分组成的图像记为onep;
[0065]
对onep进行皮肤检测,获得属于人脸的像素点的集合faceu
1
;
[0066]
使用大津法对onep进行图像分割,获得前景部分像素点的集合faceu
2
;
[0067]
获取faceu
1
和faceu
2
的交集lsu;
[0068]
在faceu
2
中获取lsu的补集bu;
[0069]
计算bu中的每个像素点与faceu
1
中的像素点的最小距离,将bu中最小距离小于预设的距离阈值的像素点存入集合faceu
1
中,获得最终的属于人脸的像素点集合faceu
final
;
[0070]
集合faceu
final
中的像素点组成人脸区域图像。
[0071]
由于定位图像中包含了大量的背景像素点,这些背景像素点对脸部识别来说是没有作用的,反而会影响识别的速度。本申请通过对定位图像进行划分,划分为面积相同的aves部分,并选择处于最上方的一部分作为进一步处理的区域,这种处理方式,能够极大地减少参与运算的像素点的数量。对选出来的部分使用大津法和皮肤检测进一步获取人脸区域的图像,能够进一步减少无用的像素点参与后续的识别运算。具体的,由于皮肤检测获得的像素点一般都是不连续的,这样子是不利于后续的特征提取。本申请上述实施例,创造性地将集合faceu
2
中的像素点对faceu
1
中的像素点所在的区域进行填充,从而获得了连续的
人脸区域图像,有利于后续进一步进行识别。而且在填充的过程中,获取了补集bu,避免了对faceu
2
每个像素点求取与faceu
1
中的像素点的最小距离,能够有效地加快运行速度。有利于提升本申请的定位系统的定位速度。
[0072]
在一种实施例中,aves的取值为7。
[0073]
在一种实施例中,对所述灰度图像进行降噪处理,获得降噪图像,包括:
[0074]
对所述灰度图像进行numcut层小波分解,获得小波高频系数和小波低频系数;
[0075]
对第numcut层小波分解获得的第i个小波高频系数f
numcut,i
(x,y),进行如下处理:
[0076]
若|f
numcut,i
(x,y)|≥thre
1
,则使用下述公式对f
numcut,i
(x,y)进行处理:
[0077]
af
numcut,i
(x,y)=sgn(f
numcut,i
(x,y))
×
(|f
numcut,i
(x,y)|-ctrpa
×
thre
1
)
[0078]
式中,af
numcut,i
(x,y)表示对f
numcut,i
(x,y)进行处理的结果,sgn表示符号函数,ctrpa表示控制参数,0<ctrpa<1,thre
1
表示预设的处理阈值,(x,y)表示像素点的位置;
[0079]
若a
×
thre
1
<|f
numcut,i
(x,y)<thre
1
,则使用下述公式对f
numcut,i
(x,y)进行处理:
[0080][0081]
式中,a表示关系参数;
[0082]
若|f
numcut,i
(x,y)|<a
×
thre
1
,则使用下述公式对f
numcut,i
(x,y)进行处理:
[0083]
af
numcut,i
(x,y)=z
×
|f
numcut,i
(x,y)|
[0084]
式中,z表示预设的比例参数;
[0085]
i∈{1,2,3},f
numcut,1
(x,y)、f
numcut,2
(x,y)、f
numcut,3
(x,y)分别表示第numcut层小波分解获得的水平方向的小波高频系数、垂直方向的小波高频系数、对角线方向的小波高频系数;numcut∈[1,numcut];
[0086]
关系参数a通过下述方式进行确定:
[0087][0088]
式中,b为预设的常数型参数,grayp表示灰度图像的所有像素点的集合,avegra
j
表示grayp中的像素点j的梯度幅值,numgrayp表示grayp中的像素点的总数;
[0089]
将对小波高频系数进行处理的结果和小波低频系数进行重构,获得降噪图像。
[0090]
本发明上述实施例,通过对灰度图像进行小波分解,对分解得到的小波高频系数进行处理,然后将小波低频系数和处理后的小波高频系数进行重构,获得降噪图像。这种处理方式,能够在保持灰度图像中的图像细节的同时,有效地对灰度图像中的噪声进行去除,有利于为后续的识别提供高质量的图像。具体地,在对小波高频系数进行处理时,通过设置处理阈值,并将小波高频系数与处理阈值进行对比,为不同情况的小波高频系数自适应地选取不同的处理函数,使得对小波高频系数的处理更具有针对性,重构后的降噪效果更好。能够避免出现如现有技术中,使用硬阈值的方式对小波高频系数进行处理时,图像失真的问题。值得一提的是,现有技术中,还会采用软阈值的方式对小波高频系数进行处理,但是传统的软阈值处理方式,容易出现降噪过度,使得图像的细节信息丢失的问题,主要原因是两个阈值之间的取值范围的不好把握。因此,本申请通过设置关系参数a来控制所述取值范
围,在灰度图像的梯度幅值均值变大时,所述取值范围会逐渐变小,而在灰度图像的梯度幅值均值变小时,所述取值范围会逐渐变大。相较于传统的硬阈值和软阈值的处理方式,本发明上述实施例,提出了一种取值范围的自适应调节公式,能够在尽可能地保留更多图像细节的同时,尽可能地降噪。
[0091]
在一种实施例中,小波分解的层数numcut通过下述方式进行确定:
[0092]
(1)对灰度图像进行k层小波分解,获得小波高频系数hp
k
和小波低频系数lp
k
,k∈[1,k];
[0093]
对小波高频系数hp
k
进行硬阈值处理,获得处理后的小波高频系数ahp
k
;
[0094]
将lp
k
和ahp
k
进行重构,获得k层小波分解的降噪图像p
k
;
[0095]
(2)对灰度图像进行k+1层小波分解,获得小波高频系数hp
k+1
和小波低频系数lp
k+1
,k+1∈[1,k+1];
[0096]
对小波高频系数hp
k+1
进行硬阈值处理,获得处理后的小波高频系数ahp
k+1
;
[0097]
将lp
k+1
和ahp
k+1
进行重构,获得k+1层小波分解的降噪图像p
k+1
;
[0098]
(3)计算p
k
和p
k+1
之间的区别程度:
[0099][0100]
式中,表示p
k
和p
k+1
之间的区别程度,表示p
k
中的像素点n的视觉优先级,表示p
k
中的像素点n和和p
k+1
中对应的位置的像素点的之间的细节信息区别度,pku表示p
k
中的像素点的集合;
[0101]
视觉优先级通过如下方式进行计算:
[0102][0103]
式中,xw(p
k
)表示p
k
的相位谱,cl(p
k
)表示p
k
的残余谱,cl(p
k
)=ln(fd(p
k
))-avelb*ln(fd(p
k
)),式中,fd(p
k
)表示p
k
的幅值谱,avelb表示预设的均值滤波模板,*表示卷积符号,ftr表示傅里叶运算,g
pk
(n)表示像素点n处非局部均值降噪模板;
[0104]
细节信息区别度通过如下方式进行计算:
[0105][0106]
式中,grau={1,2,3},grax
1
(p
k
,n)表示p
k
中的像素点n的水平方向的梯度,grax
1
(p
k+1
,n)表示像素点n在p
k+1
中对应的位置的像素点的水平方向的梯度,grax
2
(p
k
,n)表示p
k
中的像素点n的竖直方向的梯度,grax
2
(p
k+1
,n)表示像素点n在p
k+1
中对应的位置的像素点的竖直方向的梯度,grax
3
(p
k
,n)表示p
k
中的像素点n的梯度方向,grax
3
(p
k+1
,n)表示像素点n在p
k+1
中对应的位置的像素点的梯度方向,s表示预设的常数型系数;π表示连乘符号;
[0107]
(4)使用不同的k值进行(1)-(3)的运算,直到p
k
和p
k+1
之间的区别程度小于设定的区别程度阈值,将此时k+1的值作为小波分解的层数numcut的值。
[0108]
现有技术中,小波分解的层数经常是由人工试验所得,这种方式显然不能适用于本申请的定位系统。本发明上述实施例,实现了小波分解层数的自动计算,在计算时区别程
度时,充分考虑了分解层数相邻的两幅降噪图像在梯度值和梯度方向以及视觉优先级方面的差异,通过对区别程度的收敛判定来获取合适的分解层数,使得分解层数具有自适应性,针对不同情况的图像自动计算得到不同的分解层数,使得后续的计算结果更为准确。在获取降噪图像时,使用的是运算速度极快的硬阈值处理的方式,这种方式能够实现快速实现对灰度图像降噪效果的初步评估,然后再根据评估结果调整k的值,有利于提高小波分解层数的确定速度。
[0109]
在一种实施例中,z的取值为0。
[0110]
尽管已经示出和描述了本发明的实施例,本领域技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变形,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1