一种无人接驳车多站点路径优化的改进遗传算法的制作方法
[0001]
本发明涉及一种无人接驳车多站点路径优化的改进遗传算法的方法。
背景技术:
[0002]
旅行商问题,即tsp问题(traveling salesman problem)又译为旅行推销员问题、货郎担问题,是数学领域中著名问题之一。假设有一个旅行商人要拜访n个站点,他必须选择所要走的路径,路径的限制是每个站点只能拜访一次,而且最后要回到原来出发的站点,求解出最优路径和最短距离。这是个np完全问题。如果运用穷举算法,效率则相当低下,(n=10时,计算机需要迭代10!次才能找出最短路径。n=100时,计算机需要迭代100!次)通常tsp问题的求解是由两步构成的:1.计算两两站点间的最短路径:利用类似dijkstra[3]、a*算法求出最短距离。2.计算最短巡回路径:利用类似遗传算法、蚁群算法的搜索算法求巡回拜访的次序。
[0003]
目前运用于解决tsp问题的主流方法是采用一些随机的、启发式的搜索算法,如遗传算法、蚁群算法、粒子群算法、模拟退火算法等。但这些算法都有相同且致命的缺点,那就是得到的解往往不是最优解,只能尝试最大限度地收敛于最优解,得到一个次优解。虽然各算法的实现思路有所差异,但也或多或少地相互借鉴,有的与随机因子有关,如蚁群算法更与种群状态相关,而遗传算法更与迭代次数相关;有的与初始状态有关,如粒子群算法就对种群的数量与个体的最大速度紧密联系;有的与随机函数有关,往往自适应概率函数比固定概率更具有鲁棒性;有的与选择策略有关,对于是否引入最优化思想来产生初始种群在各算法中的选择也各不相同。
[0004]
当tsp问题应用到无人车站点网络中时(如站点,学校等),考虑到障碍物的存在,就不能像宏观场景一样直接构建地图了,而需要构建特殊抽象地图。例如在学校中采用无人接驳车,需要根据需要在学校的固定定位进行启停操作,因其属于无人驾驶,故需要给车辆预先规划好行进的路线,而怎样对各点位进行遍历,同时满足最优路径,是需要在路径规划时需要考虑的问题,而在原始地图上,两个看起来很接近的点位(欧氏距离很小),也许会因为中间具有障碍物或车辆动力学约束的缘故,导致实际距离很远,那么就需要用两点之间的曼哈顿距离来作为代价对其路径进行约束,而目前的无人车路径规划优化这一块的算法复杂,且路径规划与现有具体场景匹配度低,其对路径规划也有所影响。
[0005]
专利cn201910878355.3提供了一种基于设置相似度阈值和进化过程中的收敛度系数的改进方法,虽然加快鉴别父代个体优劣的速度,但是由于设置的固定变异概率,导致迭代效率低下,当个体适应度小的时候,过低的变异概率会降低迭代效率,拖慢运算速度。而当个体适应度大的时候,优良个体容易被过高的变异概率破坏,得出次优解。
[0006]
专利cn201710145733.8中,初始种群是随机产生的,导致初始种群质量参差不齐,最终解的质量得不到保障。同样的该方法也是设置的固定概率,也具有专利cn201910878355.3同样的劣势。
[0007]
也有现有论文,如在于莹莹,陈燕,李桃迎改进遗传算法求解旅行商问题[j].控制
与决策,2014,14(8):1483-1488.中,提出采用纯粹的贪婪算法对初始个体进行优化。而常见的贪婪种群生成法是在随机生成一个初始站点c1后,穷举c1与其他站点之间的距离,并选出最小距离作为下一个起点c2,直到遍历所有的站点之后又回到起点,完成闭合。如此生成的初始种群确实要优于随机生成的初始种群,但是却也产生了新的问题:他的改进在当前总是做出最好的选择,也就是说通过这种方法算法容易过早收敛,通常只能得到局部最优解。
技术实现要素:
[0008]
本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
[0009]
为了实现根据本发明的这些目的和其它优点,提供了一种无人接驳车多站点路径优化的改进遗传算法,包括:
[0010]
基于无人机接驳车的多个站点进行抽象地图的构建,并采用改进的遗传算法对抽象地图进行路径规划;
[0011]
其中,所述抽象地图的构建方式在于,通过选取多个站点中的任意一个站点作为基准,把站点与站点之间的最短实际距离转化为欧式距离并进行地形加权得到真实代价之后逐一进行排列,逐个设置坐标得到最终的抽象地图。
[0012]
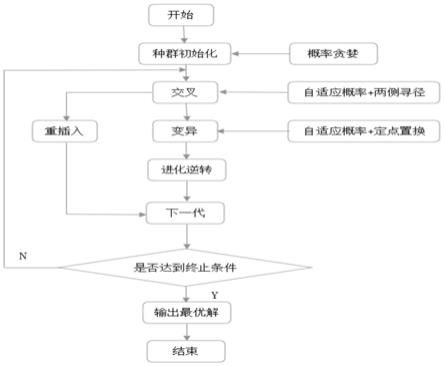
优选的是,采用改进的遗传算法对抽象地图进行路径规划的方法被配置为包括:
[0013]
s1,通过传统遗传算法对每个站点进行编码,并基于编码产生对应的初始种群,采用概率贪婪的方式对种群进行优化,以将预定范围的优化个体与其它个体进行区分;
[0014]
s2,在区分后的编码中引入动态自适应交叉概率与动态自适应变异概率,以对遗传算法中进行交叉算子、变异算子改进,并对改进结果进行进化逆转处理;
[0015]
s3,将优化个体重插入逆转处理的结果中,返回到s2步骤中,直到其优化结果达到终止条件。
[0016]
优选的是,在s1中,所述编码是采用1到n的整实数进行编码,以通过编码将遍历点编号顺次记录下来,以得到每一个染色体的遍历路径方案。
[0017]
优选的是,在s1中,在编码中随机选取一个编码c1作为基准点,穷举c1与其他编码之间的距离并求出其和,以得到其它编码被选中作为下一个起点的概率,以基于该概率对各编码的个体适应度进行计算,以基于个体适应度对编码进行优化区分。
[0018]
优选的是,在s2中,所述交叉算子改进被配置为包括:
[0019]
s21,在父代编码p1、p2中,寻找c1左右两侧的各编码,并分别计算各编码与c1的距离;
[0020]
s22,将右侧较小距离的编码放入p3中,将左侧较小距离的站点放入p4中,若距离相同,则取p1的点;
[0021]
s23,把p1,p2中的c1点删去,将新放入的点重新作为起点,往复直到p1、p2中的点仅剩1个时停止,并对p1、p2、p3、p4进行比较,输出代价最小的两个个体作为子代p1
′
,p2
′
。
[0022]
优选的是,所述变异算子改进被配置为采用定点置换;
[0023]
其中,所述定点置换被配置为随机选定一些位置,将对位元素进行互换,从而得到新的排列p1
″
、p2
″
。
[0024]
优选的是,在s2中,所述逆转是对p1
″
、p2
″
的预定范围之间进行反向排序,以得到对应的染色体排列,以通过适应度的判断逆转是否有效,进而得到对应的p1
″′
、p2
″′
。
[0025]
优选的是,所述重插入是将p1、p2中筛选出前10%适应度最大的个体将其保留在集合中,用以替换掉p1
″′
、p2
″′
中适应度最低的10%的个体。优选的是,所述自适应交叉概率被配置为基于以下公式以得到:
[0026][0027]
式中,p
c1
为预设最大交叉概率,设置为0.9,p
cmin
=0.6,f
max
为种群最大适应度,f
avg
为种群平均适应度,f
i
为两个即将进行交叉父代中较大的适应度。
[0028]
优选的是,所述自适应变异概率被配置为基于以下公式以得到:
[0029][0030]
式中,p
m1
为预设最大交叉概率,设置为0.05,p
mmim
=0.01,f
max
为种群最大适应度,f
avg
为种群平均适应度,f
i
为即将进行变异操作个体的适应度。
[0031]
本发明至少包括以下有益效果:其一、本发明可以根据需要对实际的复杂环境需要接驳的多个站点进行处理,以构建出需要遍历的抽象地图,以便于后期根据图中的点位对其遍历路径进行优化,具有更好的适应性,同时在需要删除某些站点后,通过对应的算法对新得到抽象地图进行实行计算,可以新的遍历路径,具有更好的适应性。
[0032]
其二、本发明针对传统遗传算法存在易陷入局部最优,收敛速度慢等问题,提出了一种改进的遗传算法。该算法利用概率贪婪的思想得到初始种群,并采用个体适应函数影响的动态自适应概率保护种群中的优化个体,淘汰劣等个体。此外,以贪婪思想为核心设计两侧寻径交叉算子,采取定点转换法设计变异算子,既增加了种群的多样性,又加快了收敛速度。最后,进化逆转的加入确保种群会向好的方向发展,增强搜索能力,而重插入操作使得适应度最高的染色体得以延续。通过对经典官方地图进行仿真实验,结果表明改进遗传算法在收敛速度、求解精度和稳定性上对比其他算法均得到了提高。
[0033]
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
[0034]
图1为本发明的算法处理流程示意图;
[0035]
图2为传统遗传算法在chn31下的迭代过程;
[0036]
图3为改进遗传算法在chn31下的迭代过程;
[0037]
图4为本发明的自适应概率下chn31的迭代过程;
[0038]
图5为文献[1]自适应概率下chn31的迭代过程;
[0039]
图6为固定概率下chn31的迭代过程;
[0040]
图7为改进遗传算法的chn31最优路径图;
[0041]
图8为改进遗传算法的att48最优路径图;
[0042]
图9为改进遗传算法的eil76最优路径图;
[0043]
图10为改进遗传算法的tsp225最优路径图。
具体实施方式
[0044]
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
[0045]
以在学校中使用无人接驳车为例,其抽象地图构建方法:选取各站点中的一个中心点为基准,把点与点之间的最短实际距离转化为欧式距离,(如整条路径全为平地,则代价就是欧氏距离。如遇坡度,则进行0.2的加权,如遇多弯道,则进行0.1的加权。例如点1到点2有三条路径,路径1距离为1000m,但有坡度,故代价为1000*(1+0.2)=1200。路径2为1250m,全为平地,代价为1250。路径3距离为1100m,多弯道,故代价为1100*(1+0.1)=1210。故我们选取路径3为合法路径,规定点1到点2的代价为1210)逐一进行排列,并在地图上逐个按其坐标进行标注设置,以在将各点标注完成后,形成在学校中对各站点按其坐标进行排布最终形成的一张抽象地图。虽然地图在外形上与实际地形并不一致,但是每一个点都与目的地一一对应,且距离相同,按照本方法规定的十进制编码,运用本发明的优化方法求得的路径就是当前场景下的最优路径,同理的本方法与可类似的应用于城市之间无人接驳车的路径规划,在抽象地图中对各城市进行路径规划后,可以形成遍历各城市,即将地图中的一个城市作为起始点,对各城市进行遍历后,回到起始城市的最优、最短路径规划。
[0046]
具体来说,在抽象地图完成后先对地图中的各站点采用十进行制数进行编码,并在编码后采用本发明的优化方法得到地图中的行车路径,包括:
[0047]
1.编码
[0048]
和传统遗传算法相同,对站点编码采用1到n的整实数编码,将遍历点编号顺次记录下来,以此来表示路径,每个染色体表示一种周游方案。
[0049]
2.初始种群的产生
[0050]
随机产生的初始种群染色体通常有质量参差不齐,平均适应度较小等问题,从而导致收敛速度缓慢,次优解误差率较大。本方法采用的初始种群生成方法引入了贪婪算法的思想,采用概率贪婪法来产生初始种群,概率贪婪法相较于随机生成法不仅提高了初始种群的整体质量,还很好的避免了陷入局部最优,算法的收敛速度也得到了提升,其具体方法为:
[0051]
随机生成一个初始站点(编码)c1,以c1为基准点,穷举c1与其他站点之间的距离并求出其和,每一个站点被选中作为下一个起点的概率用公式一表示为:
[0052][0053]
种群个数一定程度上影响了算法的运行速度,通过下式确定不同站点个数下的种群个数。若种群个数过少,则会使得运算速度大大降低,影响迭代效率。种群个数越少,找到最优解的速度就越慢。并且伴随着局部优化的问题。而若是种群个数过大,也会降低运算速
度,出现很多无效迭代,降低迭代效率。种群规模越大,个别的最优解就越不容易主导全体解的进化方向。种群规模的大小和个体基因的复杂程度有关,通过不断尝试,我们通常规定在不同的站点个数限定下确定一个估计数,并用公式二进行表示。
[0054][0055]
式中,nind为种群个数,city为tsp地图中站点数量。
[0056]
3.计算个体适应度
[0057]
设n个站点tsp问题中的一条合法染色体为(c1|c2|c3|
……
|ci|
……
|cn),则该个体的适应度值可以通过公式三求得为:
[0058][0059]
其中,d(c
i
c
i+1
)表示相邻两站点:站点ci和站点ci+1之间的距离。由遍历代价的倒数构成个体适应度,可以看出距离越大适应度值越小,染色体越劣;距离越小而适应度值越大,染色体越优。
[0060]
4.重插入选择法
[0061]
为了节省运算时间,保证子代种群的优越性,在选择操作中引入重插入的方法,即在交叉、变异之前,从父代中筛选出前10%适应度最大的个体将其保留在集合中,用以替换掉子代中适应度最低的10%的个体,如此往复循环,避免在接下来的交叉、变异操作中破坏种群的优良性,确保子代个体的最优者永远不会劣于亲代个体的最优者。
[0062]
5.自适应交叉概率的引入与交叉算子的改进
[0063]
传统遗传算法中把两个父代个体的部分结构加以替代重组而生成新个体的操作称为交叉。通过交叉,可以大大提高遗传算法的搜索能力。在遗传算法中,交叉算子因其全局搜索能力而起着核心作用,是产生新个体的主要方法,它直接影响着算法的最终实现和性能。
[0064]
在遗传算法中,除去交叉算子,交叉概率也是影响算法性能的关键因素之一,直接影响算法的收敛性。交叉概率与新个体产生的速度成正比。然而,交叉概率过大会增加模式被破坏的可能性,使得具有高适应度的个体结构很快就会被破坏;但是如果交叉概率过小,搜索过程又会被延缓,甚至停滞不前。
[0065]
所以本方法引入一种自适应操作,当种群各个体适应度趋于一致或者趋于局部最优时,令交叉概率和变异概率二者增加,而当群体适应度比较分散时,又相应的减少交叉概率和变异概率。
[0066]
同时,对于适应度高于群体平均适应度的个体,对应于较低的交叉概率,使该个体得以保护从而进入下一代;而低于平均适应度的个体,相对应于较高的交叉概率,使该个体被淘汰掉。因此,自适应遗传算法能够提供相对某个解的最佳概率。
[0067]
自适应交叉概率用公式四表示:
[0068][0069]
式中,p
c1
为预设最大交叉概率,设置为0.9,p
cmin
=0.6,f
max
为种群最大适应度,f
avg
为种群平均适应度,f
i
为两个即将进行交叉的父代中较大的适应度。
[0070]
影响交叉操作的除了交叉概率还有交叉算子,它影响交叉后子代的质量。传统交叉算子随机性太大,无法保证子代优越性。本方法采用贪婪思想改进交叉算子,两侧寻径交叉,其设置站点距离如表1所示:
[0071]
站点1234567810102030403020102100104030403020320100102030403043020100102030405403020100102030630403020100102072030403020100108102030403020100
[0072]
表1
[0073]
不妨设两个被选中即将开始进行交叉操作的父代编码分别为:p1=3|2|7|5|1|6|8|4,p2=6|2|7|3|4|8|1|5
[0074]
通过交叉操作后生成的子代为p1
′
,p2
′
。
[0075]
具体操作如下所示:
[0076]
1.随机生成起点c1,初始化子代已访问站点列表,使其有且仅有c1一个点。
[0077]
2.分别在p1和p2中找到c1两侧的站点,并分别计算左右两侧的站点与其距离,将右侧较小距离的站点放入p3中,将左侧较小距离的站点放入p4中,(若距离相同,则取p1的点)把p1,p2中的c1点删去,将新放入的点重新作为起点,如此往复。
[0078]
3.当p1,p2中的点仅剩1个时停止,比较p1,p2,p3,p4,输出代价最小的两个个体作为子代p1
′
,p2
′
。
[0079]
不妨设当初始站点选择为2,比较两父代右侧站点均为7,把7作为起点,对比右侧站点5、3。查表选择最短距离的站点5,再把5作为起点,如此循环,可以得到p3=2|7|5|6|8|1|3|4。同理,对双父代进行向左取小,可以得到子代p4=2|3|4|7|6|5|8|1。通过计算,可以得出p1,p2的代价分别为190、210,p3,p4的代价分别为120、110,输出p3,p4作为子代p1
′
,p2
′
。对比得知,两侧寻径交叉操作得到的子代适应度要高于父代。
[0080]
6.自适应变异概率的引入与变异算子的改进
[0081]
对于变异操作来说,如果变异概率取值过小,新的个体结构的产生就会变得相对困难;但如果其取值过大,极具随机性的变异操作就会将遗传算法改变为纯粹的随机搜索算法。若是采用固定的变异概率,在不同的情况下,需要通过反复实验来确定变异概率,通常很难找到适应于每种情况的最优概率。
[0082]
与交叉操作相同,对于变异操作,本方法用相同的思路设计自适应变异概率。
[0083]
自适应变异概率用公式五表示:
[0084][0085]
式中,p
m1
为预设最大交叉概率,设置为0.05,p
mmim
=0.01,f
max
为种群最大适应度,f
avg
为种群平均适应度,f
i
为即将进行变异操作的个体的适应度。
[0086]
变异算子增加种群的多样性,决定了遗传算法的局部搜索能力。通常采用的变异算子使得变异元素接近且单一,无法较好地实现种群多样化。本方法采用的变异算子被称为定点置换。随机选定一些位置,将对位元素进行互换,从而得到新的排列,以p1
′
:2|7|5|6|8|1|3|4为例,具体操作如下:
[0087]
(1)、随机产生偶数位变异序列(假设为6)。
[0088]
(2)、选择两组不同的来置换:d1=1,5,6;d2=2,3,4;
[0089]
(3)、互换对位元素,得到新的排列,p1
″
7|2|8|1|5|6|3|4。
[0090]
7.进化逆转操作。
[0091]
进化是指逆转操作具有单向性,即只有逆转之后个体变得更优才会执行逆转操作,否则逆转无效。具体操作为:随机产生同上文的1至8之间的两个随机数r1和r2,如果r1和r2取相同数,逆转就无效了。将r1和r2之间的基因进行反向排序。比如对于染色体:p=1|3|4|2|8|7|6|5,随机取得r1=3,r2=6,基因反向排列之后得到的染色体:p
′
=1|2|7|8|2|4|6|5。判断p的适应度f(p)和p
′
的适应度f(p
′
),如果f(p
′
)>f(p),那么逆转操作算作有效,否则无效。
[0092]
实施例1:使用matlab作为仿真平台,所用地图与得到的结果均与官方案例库中相应数据进行对比。使用权威tsplib实验数据分别对传统遗传算法和改进遗传算法进行验证,每个地图运行20次,得出平均结果如表2所示:
[0093][0094]
表2
[0095]
改进遗传算法相较于传统遗传算法具有更快的收敛速度,可以在很短的时间里避免局部最优,从而得到全局最优解。改进算法的误差率可以控制在2%以内,效果较好。传统遗传算法和改进遗传算法的迭代过程分别如图2图3所示。
[0096]
使用本算法与文献[1]和文献[2](文献[1]:于莹莹,陈燕,李桃迎.改进遗传算法
求解旅行商问题[j].控制与决策,2014,14(8):1483-1488.文献[2]:王震,刘瑞敏,朱阳光,王枭.一种求解tsp问题的改进遗传算法[j].电子测量技术,2019,33(12):91-96)的方法进行对比,实验结果对比如表3所示。与参考文献[2]一种求解tsp问题的改进遗传算法进行比较,所测地图的误差率均小于或等于该算法,且由于引入了自适应变异概率和自适应交叉概率,运算速度得到了极大的提升。
[0097][0098]
表3
[0099]
引入控制变量法思想,将变异概率和交叉概率设置为变量,保持其他参数不变,将本方法的自适应动态概率分别更改为固定概率(p
c
=0.8,p
d
=0.05)和文献[1]的动态概率进行对比实验,得到如下表4的控制变量实验结果对比结果:
[0100][0101][0102]
表4
[0103]
从表2,表3可知,改进遗传算法的误差率很小,得到的平均最优解可以达到已知最优解,在个别地图甚至还可以优于已知最优解。由表4可见,在其他条件不变的情况下,使用
本方法设置的动态自适应概率,较之文献[1]提出的动态自适应概率和固定概率,不仅误差率更小,运行速度还更快,在一定程度上规避了过早陷入局部最优的困境。使用本方法自适应概率、文献[1]自适应概率与固定概率在分别对chn31地图求解所产生的迭代过程如图4-6所示,由以上3图可更加直观的看出,在相同条件,相同地图的迭代过程中,使用本方法提出的自适应动态概率的迭代过程在前期更加陡峭,即优化速度更快。在算法进行到40%的预设迭代代数时,已经得到最优解。其余两种情况,不仅前期迭代缓慢,到了后期任在迭代,导致算法效率低下,且精度也不高,波动较大。
[0104]
将本发明的方法分别应用至chn31、att48、eil76、tsp225中,可以得到对应的最优路径,以通过对算法的优化,进而缩短其计算时间,保证其计算精度。
[0105]
更具体的以采用chn31地图进行说明,共有31个站点,有的人采用站点a,站点b
……
站点z来编码,有的人用二进制编码,有的人用8进制编码,本方法的编码则是站点1,站点2,站点3
……
站点31,这就是编码方法。具体的路径1-2-3-4-5
-……-
31-1这是一条合法的染色体,其闭合的路径曲线做为一个染色体个体。
[0106]
其它的路径1-3-2-4-5
-……-
31-1也是一样的。而编码产生的一般方法是随机产生,本发明的方法是采用概率贪婪,即比如我们随机产生的起点为站点1,那么我们就比较站点1和站点2的距离,站点1和站点3的距离
……
站点1和站点31的距离,但是并不直接选取最小距离的站点为下一个点,因为这样会陷入局部最优的困境,所以我们把他们所有的距离之和作为分母,把自己的距离作为分子,就得到了30个概率(30个概率加在一起肯定为1)然后根据概率来选择下一个点(不一定为距离最小的),这样就避免了局部最优,同时也提高了个体质量。
[0107]
更进一步来说,如设定一次性产生30个个体,交叉操作是选择两个个体,进行交叉之后比较各自代价,取代价最小两个作为新个体,进入子代。交叉操作全体结束之后,我们就得到了新的30个个体,这些个体删除了一些代价大的个体,加入了一些代价小的个体。接下来,这30个个体将进行变异操作,即变异操作是在交叉操作完成的基础上进行,在变异操作后进一步进行逆转,以确保个体的处理质量满足要求。
[0108]
实施例2,以学校中需要遍历停泊的20个站点(如宿舍、图书馆、教学楼、实验室等需要遍历停泊的站点)为例,选取宿舍作为基准点,把与其它邻近以及其它需要到达的点之间的最短实际距离转化为欧式距离并进行加权操作之后逐一进行排列,通过各点在gps或其它定位方式的经纬度或其它表现形式作为坐标进行标注,通过对各需要遍历的各点分别进行标注,得到各点在空间上的抽象地图;
[0109]
当得到与各点相配合的抽象地图后,对各点采用十进制进行编码,基于此编码产生初始种群,选取中其中的一个点为基准点,穷举该站点与其他站点之间的距离并求出其和,用每一距离与之相比得到每一个站点被选中作为下一个起点的概率,直至闭环,完成一条染色体的生成。计算该染色体中代价之和,并取倒数,求出适应度。染色体达到预设生产数量之后,复制前10%适应度最大的染色体留作后用,对种群进行由自适应交叉概率控制下的改进交叉算子的操作,完成之后进行由自适应变异概率控制下的改进变异算子的操作;
[0110]
对变异处理后的染色体进行进化逆转操作,并在逆转操作后得到新的排列,将之前复制的染色体替换处理之后的种群中适应度最小的染色体,完成一次迭代。得到新的种
群进一步重复进行处理,在达到终止条件后得到最终的遍历路径排列形式。
[0111]
所述无人车基于该排列路径得到在各点位之间进行遍历行驶的最优方式,进而使得无人车可以根据点位排列顺序依次遍历,完成某一特定场景中多站点情况下对无人车接驳行驶的路径优化。
[0112]
以上方案只是一种较佳实例的说明,但并不局限于此。在实施本发明时,可以根据使用者需求进行适当的替换和/或修改。
[0113]
这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
[0114]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1