基于特征点重投影的单眼虹膜匹配方法与流程
[0001]
本发明属于计算机视觉图像识别领域,特别涉及一种单眼虹膜匹配方法,可用于在各种需要判断目标人员身份的场景中进行身份认证。
背景技术:
[0002]
虹膜识别是指通过特殊设备采集到双眼虹膜图像,并将图像与数据库中已有的数据进行比对,来识别目标人身份信息的技术。目前,主流的虹膜识别有两种方法:基于深度学习的虹膜识别和基于特征点的虹膜识别。其中:
[0003]
基于深度学习的虹膜识别方法,是数据驱动的识别过程,其通过加入眼睛偏斜、姿态变化、带有噪声的图像数据样本,使得模型能够识别出这些状态下的虹膜特征。但是,这种方法存在可解释性差、对抗样本的问题,在实际场景中很难保证安全性。
[0004]
基于特征点的虹膜识别方法,是从图像本身的特征人手,从多个角度判断两个图像的观测数据,具有省时、成本低、实用性强的优势,可以部署室内外甚至是手机、电脑等设备中,具有很高的研究价值。向来被认为是身份识别中最具安全、便捷的一种。从上个世纪发展至今,基于特征点的方法已经发展出了一套完善的理论,有强大的数学原理做基础。虹膜识别是身份识别领域的研究热点。该方法由于瞳孔尺度变化、睫毛头发遮挡,存在提取出的虹膜特征点误差大的问题。
[0005]
基于特征点的虹膜识别属于计算机视觉、计算机图形学、图像处理的交叉研究领域。如何在识别速度和精度上进行权衡,是领域内研究人员需要考虑的一大课题。例如,申请专利号为cn202010167257.1,名称为“一种采用图像增广和小样本学习的虹膜识别方法”的专利申请,是通过构建cnn网络来提取虹膜的特征向量,最后通过比较序列距离来获取匹配结果。该方法看似取得了不错的结果,实际在识别速度上还远远达不到可以实际应用的标准。同时,该方法直接使用采集的眼部图像进行处理,使得算法有很大一部分精力都在处理与虹膜区域无关的部分。这不仅造成了时间上的浪费,而且,由于这些额外区域很可能会淡化虹膜部分对最终结果的影响,最终将会导致错误的识别情况。在目前已发表的使用特征点进行虹膜识别的算法中,这种情况并不是个例。因此,如何在提高识别速度的同时保持绝对的识别准确度,
[0006]
如何使识别算法更“专注”于虹膜的区域,是目前虹膜识别算法研究人员应该迫切解决的问题。
技术实现要素:
[0007]
本发明的目的在于针对上述现有技术的不足,提出一种基于特征点重投影的单眼虹膜匹配方法,以在提高识别速度的同时保持绝对的匹配准确度。
[0008]
实现本发明目的的技术方案是:对于获取到的眼部图像,首先进行分割,仅提取出虹膜的区域,剔除虹膜边界特征点,然后再进行下一步的识别,具体步骤包括如下:
[0009]
1.一种基于特征点重投影的单眼虹膜匹配方法,其特征在于,包括如下:
[0010]
(1)采用摄像头获取单眼虹膜图像i,并对其进行数据预处理:
[0011]
(1a)采用hough变换的方法对单眼虹膜图像i进行虹膜定位,得到虹膜区域分割图像i’;
[0012]
(1b)采用orb特征点检测方法对虹膜区域分割图像i’中的特征点进行检测,得到虹膜区域分割图像i’的特征点集合p和特征点的特征描述信息集合b;
[0013]
(1c)剔除虹膜区域分割图像i’在虹膜区域边界处的特征点及其特征描述;
[0014]
(2)构建虹膜识别数据库,即将步骤(1)重复多次,用每次预处理后的虹膜区域分割图像i’构成虹膜识别数据库d;
[0015]
(3)采用摄像头获取待识别单眼虹膜图像i
a
;
[0016]
(4)将待识别单眼虹膜图像i
a
与虹膜识别数据库d中的第i个虹膜区域分割图像i
i’进行匹配,其中i∈[1,n
d
],n
d
为数据库内存储信息总数:
[0017]
(4a)对待识别单眼虹膜图像i
a
,采用(1)所述方法进行数据预处理,得到待识别虹膜区域分割图像i
a
以及待识别虹膜区域分割图像i
a
的特征点集合p
a
和特征点的特征描述信息;
[0018]
(4b)将待识别虹膜区域分割图像i
a’与虹膜区域分割图像i
i’中的相同的特征点进行匹配,得到多个初始特征匹配点对,筛选出所有初始特征匹配点对中符合极线约束的特征点对q
f
;
[0019]
(4c)根据特征点对q
f
,计算待识别虹膜区域分割图像i
a’与虹膜识别数据库d中第i个虹膜区域分割图像i
i’的单应矩阵h;
[0020]
(4d)通过单应矩阵h将特征点对q
f
中虹膜区域分割图像i
i’的特征点p
i
,重投影到待识别虹膜区域分割图像i
a’的空间中,得到虹膜区域分割图像i
i’重投影后的特征点集合p
i’;
[0021]
(4e)根据实际识别精准度需求设定像素位置偏差的阈值t;
[0022]
(4f)计算待识别虹膜区域分割图像i
a’的特征点集合p
a
与虹膜区域分割图像i
i’重投影后的特征点集合p
i’间的像素位置偏差并将其与像素位置偏差的阈值t进行比较:
[0023]
若像素位置偏差小于阈值t,则判定待识别单眼虹膜图像i
a
与虹膜识别数据库d中第i个虹膜区域分割图像i
i’匹配成功;
[0024]
否则,匹配失败。
[0025]
本发明具有如下优点:
[0026]
第一:本发明以单眼虹膜区域分割图像作为输入,去除了无关的背景杂点,例如巩膜、瞳孔,使识别过程只关注虹膜区域,避免了特征提取过程中产生大量冗余的特征,有效提高了识别的准确性和效率。
[0027]
第二:本发明在特征提取部分提取图像的orb特征,避免了经典的gabor滤波器法需要从分辨率统一的归一化虹膜图像中提取虹膜纹理特征的做法。同时由于orb特征具有旋转和尺度一致性,顾可以省略掉从分辨率统一的归一化虹膜图像中提取虹膜纹理特征的步骤,进一步提高了识别的效率。
[0028]
第三:本发明通过计算单应矩阵和最小化重投影误差的方式完成单眼虹膜图像之间的匹配。与现有二值编码即特征模板匹配的方式相比,使用特征点进行重投影的技术能更好的利用图像的纹理特征,进一步提高识别的准确度。
附图说明:
[0029]
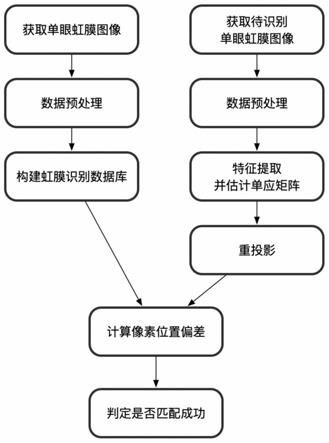
图1为本发明的实现总流程图;
[0030]
图2为本发明中对单眼虹膜图像进行数据预处理的实现子流程图。
具体实施方式:
[0031]
以下结合附图,对本发明的具体实施例和效果作进一步详细描述:
[0032]
参照图1,本发明包括如下步骤:
[0033]
步骤一:获取单眼虹膜图像i,并对其进行数据预处理。
[0034]
参照图2,本步骤的具体实现如下:
[0035]
(1.1)采用摄像头对人眼进行拍照,获取单眼虹膜图像i;
[0036]
(1.2)采用hough变换的方法对单眼虹膜图像i进行虹膜定位,得到虹膜区域分割图像i’,即先采用hough变换的方法,检测单眼虹膜图像i中虹膜边界,并将该虹膜边界外的像素点灰度值置0;再采用hough变换的方法,检测单眼虹膜图像i中瞳孔边界,并将瞳孔边界内的像素点灰度值置0,获得虹膜区域分割图像i’;
[0037]
(1.3)采用orb特征点检测方法对虹膜区域分割图像i’中的特征点进行检测,得到虹膜区域分割图像i’的特征点集合p和特征点的特征描述信息集合b:
[0038]
(1.3.1)采用fast关键点检测方法,检测虹膜区域分割图像i’中局部像素灰度变化明显的点,构成特征点集合p;
[0039]
(1.3.2)采用brief特征描述计算方法,对(1.3.1)中的每个特征点计算128维由0、1组成的向量,构成特征描述信息集合b;
[0040]
(1.4)根据特征点位置处的像素四邻域实际像素,剔除虹膜区域分割图像i’在虹膜区域边界处的特征点及其特征描述:
[0041]
若一个特征点位置处的像素四邻域里存在有像素值为0的像素点,则表示该特征点位于区域边界,把该特征点及其特征描述剔除;
[0042]
否则,保留此特征点及其特征描述。
[0043]
步骤二:构建虹膜识别数据库,即将步骤(1)重复多次,用每次预处理后的虹膜区域分割图像i’构成虹膜识别数据库d。
[0044]
步骤三:获取待识别单眼虹膜图像i
a
并与虹膜识别数据库d中的第i个虹膜区域分割图像i
i’进行匹配,其中i∈[1,n
d
],n
d
为数据库内存储信息总数。
[0045]
(3.1)采用摄像头获取待识别单眼虹膜图像i
a
;
[0046]
(3.2)对待识别单眼虹膜图像i
a
,采用步骤一所述方法进行数据预处理,得到待识别虹膜区域分割图像i
a
以及待识别虹膜区域分割图像i
a
的特征点集合p
a
以及特征点的特征描述信息;
[0047]
(3.3)将待识别虹膜区域分割图像i
a’与虹膜区域分割图像i
i’中的相同的特征点进行匹配,得到多个初始特征匹配点对,从这些初始特征匹配点对中筛选出所有初始特征匹配点对中符合极线约束的特征点对q
f
;
[0048]
(3.4)根据特征点对q
f
,计算待识别虹膜区域分割图像i
a’与虹膜识别数据库d中第i个虹膜区域分割图像i
i’的单应矩阵h,其实现如下:
[0049]
(3.4.1)根据特征点对q
f
,利用对极几何方法确定虹膜区域分割图像i
a’与虹膜识
别数据库d中第i个虹膜区域分割图像i
i’所在平面的平面方程:
[0050]
n
t
p+d=0
[0051]
其中,n为平面的法向量,d为点到平面的距离;
[0052]
(3.4.2)根据特征点对q
f
,利用对极几何方法确定虹膜区域分割图像i
a’与虹膜识别数据库d中第i个虹膜区域分割图像i
i’的旋转矩阵r和平移向量t;
[0053]
(3.4.3)根据(3.4.1)中的法向量n、点到平面的距离d和(3.4.2)中的旋转矩阵r、平移向量t,确定待识别虹膜区域分割图像i
a’与虹膜识别数据库d中第i个虹膜区域分割图像i
i’的单应矩阵h:
[0054][0055]
其中,k为摄像头的固定的内参矩阵,在实际求解过程中也可直接使用直接线性变换dlt方法计算单应矩阵h;
[0056]
(3.5)通过单应矩阵h将特征点对q
f
中虹膜区域分割图像i
i’的特征点p
i
,重投影到待识别虹膜区域分割图像i
a’的空间中,得到虹膜区域分割图像i
i’重投影后的特征点集合p
i’,其中重投影公式为p
i’=hp
i
,p
i
为特征点对q
f
中虹膜区域分割图像i
i’的特征点,h为单应矩阵;
[0057]
(3.6)根据实际识别精准度需求设定像素位置偏差的阈值t,本实例的像素位置偏差阈值设为2.35;
[0058]
(3.7)计算待识别虹膜区域分割图像i
a’的特征点集合p
a
与虹膜区域分割图像i
i’重投影后的特征点集合p
i’间的像素位置偏差集合error
i
计算像素位置偏差error
i
的公式为:
[0059][0060]
其中,j表示error
i
中第j个元素,为重投影后的特征点集合p
i’的二维的特征点像素坐标,为待识别虹膜区域分割图像i
a’的特征点集合p
a
的二维的特征点像素坐标;
[0061]
(3.8)对每个error
i
求均值,得到平均像素位置偏差并将其与像素位置偏差的阈值t进行比较:
[0062]
若平均像素位置偏差小于阈值t,则判定待识别单眼虹膜图像i
a
与虹膜识别数据库d中第i个虹膜区域分割图像i
i’匹配成功;
[0063]
否则,匹配失败。
[0064]
以上描述仅是本发明的一个具体实例,并未构成对本发明的任何限制,显然对于本领域的专业人员来说,在了解了本发明内容和原理后,都可能在不背离本发明原理、结构的情况下,进行形式和细节上的各种修改和改变,但是这些基于本发明思想的修正和改变仍在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1