用于产生笛卡尔运动系统的数字的孪生品的方法与流程
1.本发明涉及一种用于产生笛卡尔运动系统的数字的总模型的方法。这种数字的总模型也称为数字的孪生品。
背景技术:
2.由2019年10月30日在网址http:www.boschrexroth.com/various/utilities/mediadirectory/download/index.jspobject_nr=r999000044下能访问的目录已知能组装成笛卡尔运动系统的线性运动系统的产品集。线性运动系统的每条线性的纵轴线或运动轴线在此优选对应相应的笛卡尔坐标系统的轴。用相应的组件能以简单的方式构建笛卡尔运动系统的多种变型方案。
3.在使用这种笛卡尔运动系统的生产设备的规划设计的范畴内,经常构建数字的三维模型,以便简化所述生产设备的规划设计。手动构建这些模型很是耗费。
技术实现要素:
4.本发明的一个优点是,在安装笛卡尔运动系统时自动构建数字的总模型。此外,能将所述产品集的各个线性运动系统特别简单和快速地组装成笛卡尔运动系统。因此能快速和简单地构建真实的运动系统和其数字的总模型。
5.按照权利要求1,建议了一种用于产生笛卡尔运动系统的数字的总模型的方法,该方法包括下列步骤:a)提供由能组装成笛卡尔运动系统的线性运动系统构成的产品集,其中,每个线性运动系统包括壳体、滑块、驱动器和转动位置传感器以及数字的铭牌,其中,滑块沿纵轴线的方向能线性运动地支承在壳体处,其中,能用驱动器朝着纵轴线的方向驱动滑块,其中,壳体和/或滑块分别具有标准化的固定器件,这样来构造所述固定器件,使得从所述产品集的两种线性运动系统中选出的、优选任意选出的固定器件能在至少一种固定地预定的相对布置中牢固地相互连接,其中,用转动位置传感器能测量纵轴线相对重力的方向和/或相对地磁场的转动位置,其中,在数字的铭牌中储存有数字的信息,由所述数字的信息可以推导出相关的线性运动系统的结构类型,其中,能无线地或有线地读取这些数字的信息;b)提供所述产品集的每个线性运动系统的数字的单独模型,其中,数字的单独模型包括对线性运动系统的三维的几何形状的描述,优选包含了涉及到相关的纵轴线的可运动性;c)在使用所述产品集的任意选出的线性运动系统的情况下组装笛卡尔运动系统;d)读取组装好的笛卡尔运动系统的各个线性运动系统的数字的铭牌并且在使用从相关的数字的铭牌中读取的数据的情况下调用所配属的数字的单独模型;e)在使用相关的转动位置传感器的情况下测量组装好的笛卡尔运动系统的各个线性运动系统的转动位置并且在使用所测得的转动位置和各个线性运动系统的所调用的数字的单独模型的情况下生成组装好的整个笛卡尔运动系统的数字的总模型。
6.优选以所述顺序实施所述步骤。线性运动系统的壳体优选分别朝着所配属的纵轴线的方向延伸。线性运动系统优选分别包括至少一个线性滚动轴承,其带有导轨和导向车,其中,导轨平行于纵轴线延伸,其中,线性滚动轴承最多具有优选连续环绕的球形的滚动体。线性运动系统的驱动器优选分别包括皮带驱动器、特别是齿形皮带传动机构和/或丝杠传动机构、特别是滚珠丝杠传动机构。线性运动装置的驱动器优选包括电动机。所述产品集的所有的电动机优选具有一致的电气的插塞接头,通过所述插塞接头能与控制装置交换电能和电气的控制和测量信息。优选自动化地读取数字的铭牌。整个方法除了组装笛卡尔运动系统外优选均自动化地执行。数字的单独模型和/或总模型可以例如在使用所谓的step标准(http://en.wikipedia.org/wiki/iso_10303)的情况下储存,其中,可以使用任意其它用于储存几何的3d模型的数据格式。
7.在独立权利要求中说明了本发明的有利的扩展设计方案和改进方案。
8.可以规定,数字的单独模型储存在数据库中并且能从那里调用。由此可以用很短的访问时间提供特别详细的单独模型。此外,还可以毫无问题地维持大量单独模型。
9.可以规定,为数据库中的每个数字的单独模型配设明确的实例码并且将其储存在数据库中,其中,所述实例码储存在相关的线性运动系统的数字的铭牌中,因而可以在使用实例码的情况下从数据库调用数字的单独模型。因此在数字的铭牌中仅需很少的存储空间,因而数字的铭牌可以例如设计成rfid标签。明确的实例码可以例如涉及自然数。
10.可以规定,数字的单独模型储存在各所配属的数字的铭牌中并且能从那里调用。由此可以在分配单独模型和线性运动系统时避免混淆。此外,可以取消用于提供数据库的服务器的运行。
11.可以规定,这样来构造标准化的固定器件,使得从所述产品集的两种线性运动系统中选出的、优选任意选出的固定器件仅能以唯一的固定预定的相对布置相互牢固地连接。在这种唯一的相对布置中,两条相关的纵轴线优选垂直于彼此布置。因此需要用转动位置传感器仅还求出笛卡尔坐标系统的轴向。可以使用特别简单的转动位置传感器。在产生总模型时,仅需考虑到两种线性运动系统中的其中一种可能的相对布置。
12.可以规定,标准化的固定器件包括至少一个夹紧器件,所述夹紧器件在没有工具的情况下能手动夹紧并且再次松开。因此可以特别快速地组装笛卡尔运动系统。
13.可以规定,标准化的固定器件包括形状配合的校准器件,所述校准器件在夹紧器件松开时能形状配合地嵌接,其中,当夹紧器件夹紧时,形状配合地确定了两个处于嵌接的固定器件的相对位置。当夹紧器件夹紧时,优选仅形状配合地确定所述相对位置。与此对应地正好不应给定摩擦配合的固定,特别是不能给定能无级地调整相对位置的摩擦配合的固定。相对位置应当通过校准器件和夹紧器件更确切地说牢固地预定。因此在产生总模型时仅需考虑到两种线性运动系统中的其中一种可能的相对位置。
14.可以规定,固定器件包括电气的插塞连接器。优选能同时在一个方法步骤中建立起在电气的插塞连接器处的接触嵌接和在固定器件之间的校准嵌接。电气的插塞连接器和形状配合的校准器件优选具有相同的运动方向来松开或建立相应的嵌接。
15.可以规定,预定笛卡尔运动系统的运动轨迹,其中,在使用数字的总模型的情况下自动地这样来优化所述运动的时序,使得运动时间尽可能短,其中同时笛卡尔运动系统不会过载和/或不会低于笛卡尔运动系统的预定的使用寿命。用按本发明所建立的总模型,基
本上存在所述优化所需的所有的数据。用户仅需预定运动轨迹,以便执行所述优化。
16.可以规定,检测笛卡尔运动系统的运动,其中,在使用数字的总模型的情况下计算出笛卡尔运动系统的剩余的使用寿命。在使用按本发明的总模型的情况下可以自动实行剩余使用寿命计算,用户无需为此输入其它数据。优选以如下方式检测笛卡尔运动系统的运动,即,检测驱动器的驱控信号,其中,由这些驱控信号能计算出笛卡尔运动系统的运动。
17.可以规定,检测笛卡尔运动系统的运动,其中,在使用数字的总模型的情况下这样来确定润滑时间点,即,基本上排除缺少润滑的状态。在使用按本发明的总模型的情况下,可以自动确定润滑时间点,用户无需为此输入其它的数据。润滑时间点应当指的是这样的时间点,在该时间点上向笛卡尔运动系统供应润滑剂。这种润滑剂供应可以手动进行。例如通过将润滑脂输送给运动系统的润滑接头。但也可以自动进行润滑剂供应。
18.当然,之前所述的并且接下来还将阐释的特征不仅能以所说明的组合使用,而且也能以其它组合或者单独使用,而不会脱离本发明的范畴。
附图说明
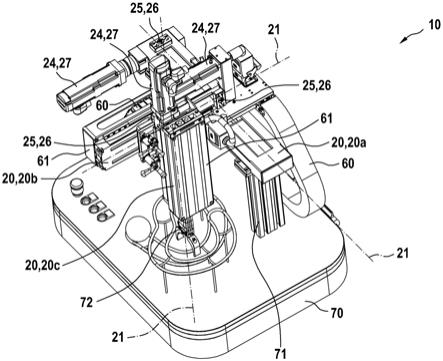
19.下文中借助附图更为详细地阐释本发明。图中:图1是带有线性运动系统的笛卡尔运动系统的立体视图;图2是第一种线性运动系统的立体的局部视图,其中,可以看到第一种类型的相应的固定器件;图3是第二种线性运动系统的立体视图,其中,可以看到两个相应的固定器件;图4是第三种线性运动系统的立体视图,其中,可以看到第二种类型的相应的固定器件。
具体实施方式
20.图1示出了带有三种线性运动系统20;20a;20b;20c的笛卡尔运动系统10的立体视图。由de 197 38 988 b4、ep 340 751 b2、de 200 80 368 u1、ep 828 083 b1、ep 1 975 463 b1、de 103 54 040 a1、de 10 2008 026 770 a1、ep 2 218 926 b1或者us 2005/265639已知能在本发明的范畴内使用的没有能量导链60和所配属的链壳体61的相应的线性运动系统。这些线性运动系统的线性导向机构典型地包括线性滚动轴承,其大多具有连续环绕的、球形的滚动体。驱动器可以电动地、气动地、线性驱动地、压电机械地或者以任意其它可以想到的方式设计。
21.所述产品集的所有线性运动系统20(由这些线性运动系统组装成了一个笛卡尔运动系统10)的共同点在于它们分别具有壳体(图2至4中的编号22),所述壳体沿着所配属的纵轴线21延伸。所配属的滑块(图2至4中的编号23)以能朝着相关的纵轴线21的方向运动的方式支承在壳体(图2至4中的编号22)中或壳体处。此外,还设有所配属的驱动器24,用所述驱动器能朝着纵轴线21的方向驱动滑块。带有这些特征的产品集由2019年10月30日在网址http:www.boschrexroth.com/various/utilities/mediadirectory/download/index.jspobject_nr=r999000044下能访问的目录公知。
22.当前的线性运动系统20;20a;20b;20c此外还分别装备有转动位置传感器25,其优选固定在所配属的壳体22处。用所述转动位置传感器25能测量相关的纵轴线21相对重力方
向和/或相对地磁场的转动位置。相应的传感器例如由网页http:www.bosch
‑
sensortec.com/bst/products/all_products/bno055公知。所述传感器优选包括微机械系统(mems),所述微机械系统由半导体基板借助光化学刻蚀工艺制造。此外,为每个线性运动系统20;20a;20b;20c配设电子的铭牌26。电子的铭牌26涉及数字的信息存储器,其内储存有数字的信息,由所述信息可以推导出相关的线性运动系统20;20a;20b;20c的结构类型,其中,能自动无线地或有线地读取这些数字的信息。这种信息存储器可以和转动位置传感器25一起联合成一个组件。但也可以考虑的是,数字的铭牌26集成到相关的电动机27中,因而能通过其连接电缆读取数字的铭牌。在数字的铭牌26中可以储存着实例码,其中,为每种可能的结构类型的线性运动系统20;20a;20b;20c配设明确的实例码。实例码在最为简单的情况下涉及自然数。
23.此外,线性运动系统20;20a;20b;20c分别装备有至少一个标准化的固定器件,该固定器件参考图2至4更为详细地阐释。在使用固定器件的情况下,线性运动系统20;20a;20b;20c被这样组装成一个笛卡尔运动系统10,即,相关的纵轴线21分别成对地垂直于彼此,因而三条纵轴线21撑开了一个笛卡尔坐标系。借助三个驱动器24在当前使夹具72能自由地在这个坐标系中运动。取代夹具72地可以设置任意其它优选能自动操纵的工具。这样来设计当前的固定器件,使得它们分别允许了两个彼此靠紧安装的线性运动系统20;20a;20b;20c的仅一个唯一的相对位置。同时在本实施例中还可能的是,第三种线性运动系统20c直接加建到第一种线性运动系统20a处。
24.图2示出了第一种线性运动系统20a的立体的局部视图,其中,可以看到固定器件33的第一种实施方式,该固定器件按照第一种类型31设计。第一种类型的固定器件31设置用于与第二种类型的固定器件(图3和4中的编号32)组装在一起。第一种类型的固定器件31在此是设计更为耗费的固定器件。该固定器件包括校准板80,校准板具有平坦的表面82,该平坦的表面面朝第二种类型的所配属的固定器件,其中,校准板80在当前牢固地与滑块23连接。但也可以考虑的是,第一种类型的固定器件31的校准板80与壳体22连接,因而获得了在线性运动系统的产品集中的相应的组合可能性。当然,平坦的表面82也可以一体地设置在滑块23处或壳体22处,其中取消了校准板80。
25.平坦的表面82平行于线性运动系统20a的纵轴线21地与第一种类型的相关的固定器件31对准并且平行于另一种线性运动系统(图3中的编号20b)的纵轴线地与第二种类型的固定器件(图3中的编号32)对准。平坦的表面82在当前配设有形式为两个校准螺栓42的校准器件41,所述两个校准螺栓垂直于平坦的表面82取向。校准螺栓42在当前构造成单独的构件,其与校准板80拧固。它们可以配设有球头以便于安装。相应的校准螺栓42也称为“带有球形附件的容纳螺栓”。在din 6321 b和din 6321 c中示出了其它能使用的校准螺栓。
26.此外,校准板配设有支撑销44,所述支撑销用于在安装期间支撑其它线性运动系统的重量。为此参考文件号为102019209806的德国专利申请。通过平坦的表面82和校准螺栓42形状配合地确定了两种所参与的线性运动系统的唯一一个可能的相对位置。这个位置在当前用形式为两个夹紧杆83的夹紧器件40保证。夹紧杆83的当前所选择的实施方案也称为“有偏心杆的枢转夹具”。能用偏心杆相对第二种类型的固定器件夹紧的夹钳86能关于一条垂直于平坦的表面82取向的轴线枢转。由此简化了其它线性运动系统的装配。在图2中,
同时示出了夹紧杆83和夹钳86的两个最终位置。
27.此外,校准板80配设有插塞连接器84。这个插塞连接器在当前设计成纯电气的,其中,可以附加或备选地设有气动的插塞连接器。插塞连接器84在当前设置用于插入松开的对接插塞连接器(图3中的编号85)并且因此布置在校准螺栓80旁不远处。但也可以考虑的是,所配属的对接插塞连接器固定地集成到第二种类型的所配属的固定器件中。然后校准螺栓42和插塞连接器84优选能以彼此间小的间距布置,因此能简单地建立相应的嵌接。
28.转动位置传感器25和数字的铭牌26在当前集成到了共同的子壳体中,所述子壳体在用虚线标注的部位处牢固地布置在壳体22处。子壳体尤其处在第一种线性运动系统20a的端部区域中。
29.第一种线性运动系统20a的驱动器在当前包括齿形皮带,该齿形皮带与电动机27处于驱动连接。
30.图3示出了第二种线性运动系统20b的立体视图,其中,可以看到两个相应的固定器件30;31;32;34;35。在滑块23处布置有第一种类型的固定器件31,所述固定器件基本上和布置在第一种线性运动系统处的固定器件一样设计。这可以参考针对图2的解释,其中,在图2和3中,相同的或相应的部分用相同的附图标记标注。在固定器件的第一种实施方式(图2中的编号33)和第二种实施方式34之间的差别仅在第一种和第二种类型的固定器件之间的嵌接旁不远处产生。在那里尤其可以尽量随意构造第一种类型的固定器件31,只要不妨碍在第一种和第二种类型的固定器件之间的标准化的嵌接。在固定器件34的第二种实施方式中,当前取消了支撑销(图2中的编号44),其中,同样可以设置这些支撑销。在支撑销和固定螺栓之间的相对位置在间距尺寸87方面在所有的实施方式中优选均设计成相同。这个间距87从对接校准板81的侧面起测量,所述侧面在安装的范畴内与校准销贴靠。
31.此外,在第二种线性运动系统20b处设有第二种类型的固定器件32,所述固定器件形成了固定器件35的第三种实施方式。固定器件35包括平坦的表面82,该平坦的表面与第一种类型的固定器件处的平坦的表面贴靠。平坦的表面82在当前布置在单独的对接校准板81处,该对接校准板在当前固定在第二种线性运动系统20b的壳体22处。所述壳体22在当前包括单独的链壳体61,在链壳体中布置有能量导链。对接校准板81在当前固定在这个链壳体处。它当然也可以固定在壳体22的另一个部分处或者与壳体22一体式构造。平坦的表面82典型地布置在壳体22的端部区域中,因此能最优地充分利用滑块的运动路径。对接校准板81在当前设计成有恒定不变的厚度的平坦的板的形式,所述平坦的板具有矩形的轮廓。但就此而言仅重要的是,在背对平坦的表面82的侧面上,存在用于夹紧器件40的夹钳(图2中的编号86)的对接夹紧面,所述对接夹紧面具有标准化的布置。
32.此外,对接校准板81配设有形式为校准钻孔43的两个校准器件41,所述校准钻孔与第一种类型的固定器件的校准螺栓(图2中的编号42)相匹配。校准钻孔设计成圆柱形,其中,它们具有用于校准螺栓的导入斜面。在当前,校准螺栓设置在第一种类型的固定器件处并且校准钻孔设置在第二种类型的固定器件处。当然,相反的配设也是可能的。重要的是,所述配设在所述产品集内是统一的,因而实现了线性运动系统20的尽可能多的组合。
33.还要指出的是对接插塞连接器85,其插入到第一种类型的固定器件处的插塞连接器(图2中的编号84)中。对接插塞连接器85在当前布置在柔性的电线的自由端部处,因而该对接插塞连接器能自由地运动。在校准器件41上的形状配合的连接的建立和在对接插塞连
接器85处的电接触的建立在当前在两个单独的工序中完成。可以这样来设计对接插塞连接器85和插塞连接器,使得为此仅需唯一一个工序。
34.转动位置传感器25和数字的铭牌26在当前集成到共同的子壳体中,所述子壳体在用虚线标注的部位处牢固地布置在壳体22处。子壳体尤其处在第二种线性运动系统20b的端部区域中。
35.第二种线性运动系统20b的驱动器在当前包括滚珠丝杠传动机构,其通过齿形皮带与电动机27处于驱动连接。
36.图4示出了第三种线性运动系统20c的立体视图,其中,可以看到第二种类型的相应的固定器件32。带有平坦的表面82的相应的对接校准板81固定在滑块23处。该对接校准板又设计成有恒定不变的厚度的矩形的平坦的板。校准钻孔43的间距在固定器件36的第四种实施方式中与在第三种实施方式中的固定器件(图3中的编号35)一致,因而获得了两种变型方案的互换性。对接校准板81的轮廓在两种所述实施方式中则设计成不同的,因为所述轮廓在标准化的范畴内,除间距尺寸87外,基本上不重要。
37.在当前,在第三种线性运动系统20c的壳体22处固定有夹具72。也可以考虑的是,壳体22装备有第一种类型的固定装置,以便实现另一种线性运动系统的加装。在按本发明的产品集的范畴内,优选提供至少两种线性运动系统,它们仅在装备的固定器件方面有所不同。
38.转动位置传感器25和数字的铭牌26在当前集成到共同的子壳体中,所述子壳体在用虚线标注的部位处牢固地布置在壳体22处。子壳体尤其处在第三种线性运动系统20c的端部区域中。
39.第三种线性运动系统20c的驱动器在当前包括滚珠丝杠传动机构,其直接与电动机27处于驱动连接。
40.附图标记列表10
ꢀꢀꢀ
笛卡尔运动系统20
ꢀꢀꢀ
线性运动系统20a
ꢀꢀ
第一种线性运动系统20b
ꢀꢀ
第二种线性运动系统20c
ꢀꢀ
第三种线性运动系统21
ꢀꢀꢀ
纵轴线22
ꢀꢀꢀ
壳体23
ꢀꢀꢀ
滑块24
ꢀꢀꢀ
驱动器25
ꢀꢀꢀ
转动位置传感器26
ꢀꢀꢀ
数字的铭牌27
ꢀꢀꢀ
电动机30
ꢀꢀꢀ
固定器件31
ꢀꢀꢀ
第一种类型的固定器件32
ꢀꢀꢀ
第二种类型的固定器件33
ꢀꢀꢀ
第一种实施方式的固定器件
34
ꢀꢀꢀ
第二种实施方式的固定器件35
ꢀꢀꢀ
第三种实施方式的固定器件36
ꢀꢀꢀ
第四种实施方式的固定器件40
ꢀꢀꢀ
夹紧器件41
ꢀꢀꢀ
校准器件42
ꢀꢀꢀ
校准螺栓43
ꢀꢀꢀ
校准钻孔44
ꢀꢀꢀ
支撑销45
ꢀꢀꢀ
在固定器件处的插塞连接器50
ꢀꢀꢀ
电动机51
ꢀꢀꢀ
电动机的电气的插塞连接器60
ꢀꢀꢀ
能量导链61
ꢀꢀꢀ
链壳体70
ꢀꢀꢀ
底板71
ꢀꢀꢀ
立架72
ꢀꢀꢀ
夹具80
ꢀꢀꢀ
校准板81
ꢀꢀꢀ
对接校准板82
ꢀꢀꢀ
平坦的表面83
ꢀꢀꢀ
夹紧杆84
ꢀꢀꢀ
插塞连接器85
ꢀꢀꢀ
对接插塞连接器86
ꢀꢀꢀ
夹钳87
ꢀꢀꢀ
校准钻孔到用于支撑销的侧面的间距
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1