一种用户意图识别方法、装置、设备和存储介质与流程
[0001]
本发明涉及人工智能领域,尤其涉及一种用户意图识别方法、装置、设备和存储介质。
背景技术:
[0002]
抓握是人类日常生活中一个重要的动作,但是因为中风,肢体损伤,帕金森疾病而导致上肢功能受损的患者无法自己实现抓握动作。诸如外肢体,外骨骼,智能假肢等可穿戴机器人能够用来帮助这些患者实现抓握功能。识别抓握意图则是控制可穿戴机器人的前提。目前已有的识别人类抓握意图的方法可以分为三类:基于肌电信号(eeg)的方法,基于脑电的方法(eeg)和基于肢体动作的方法。但是对于已经失去肢体运动能力的患者,他们的意图无法通过这种方式进行测量。
技术实现要素:
[0003]
本发明要解决的技术问题的用户意图预测不准确的问题,是提供一种用户意图识别方法,包括:
[0004]
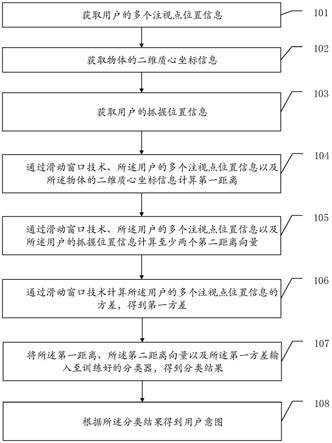
获取用户的多个注视点位置信息;
[0005]
获取物体的二维质心坐标信息;
[0006]
获取用户的抓握位置信息;
[0007]
通过滑动窗口技术、所述用户的多个注视点位置信息以及所述物体的二维质心坐标信息计算第一距离;
[0008]
通过滑动窗口技术、所述用户的多个注视点位置信息以及所述用户的抓握位置信息计算至少两个第二距离向量;
[0009]
通过滑动窗口技术计算所述用户的多个注视点位置信息的方差,得到第一方差;
[0010]
将所述第一距离、所述第二距离向量以及所述第一方差输入至训练好的分类器,得到分类结果;
[0011]
根据所述分类结果得到用户意图。
[0012]
在一些可能的设计中,所述获取用户的多个注视点位置信息,包括:
[0013]
通过眼动仪获取用户的多张输入图像;
[0014]
通过f(t
i
)=(f
x
(t
i
),f
y
(t
i
))获取用户的多个注视点位置信息,其中t
i
表示对应第i帧所述注视图像的时刻,f
x
(t
i
)表示在第i帧所述注视图像的二维注视横坐标,f
y
(t
i
)表示在第i帧所述注视图像的二维注视纵坐标,f(t
i
)表示所述注视点位置信息。
[0015]
在一些可能的设计中,所述获取物体的二维质心坐标信息,包括:
[0016]
将所述多张输入图像输入至训练好的神经网络模型,得到多个像素坐标;
[0017]
通过计算所述物体的二维质心坐标信息,其中p
ij
为第i帧所述注视图像的第j个目标的像素值,x
ij
为第i帧所述注视图像的第j个目标的所述
像素坐标的横坐标,y
ij
为第i帧所述注视图像的第j个目标的像素坐标的纵坐标,x,y为所述物体的二维质心坐标信息。
[0018]
在一些可能的设计中,所述获取用户的抓握位置信息,包括:
[0019]
获取数据库存储的抓握数据;
[0020]
通过统计分布获取食指抓握点坐标g1
xj
(t
i
),g1
yj
(t
i
);
[0021]
通过统计分布获取拇指抓握点坐标g2
xj
(t
i
),g2
yj
(t
i
)。
[0022]
在一些可能的设计中,述通过滑动窗口技术、所述用户的多个注视点位置信息以及所述物体的二维质心坐标信息计算第一距离,包括:
[0023]
通过计算所述第一距离,其中所述n为所述输入图像的数量,adf2c为所述第一距离。
[0024]
在一些可能的设计中,所述通过滑动窗口技术、所述用户的多个注视点位置信息以及所述用户的抓握位置信息计算至少两个第二距离向量,包括:
[0025]
通过计算食指距离,其中adf2i为所述食指距离;
[0026]
通过计算拇指距离,其中adf2t为所述拇指距离;
[0027]
将所述食指距离以及拇指距离组合成第二距离向量。
[0028]
在一些可能的设计中,所述通过滑动窗口技术计算所述用户的多个注视点位置信息的方差,得到第一方差,包括
[0029]
通过计算几何中心,其中o为几何中心;
[0030]
通过计算所述多个注视中心与所述几何中心的欧拉距离,其中d
i
表示第i个注视点到注视中心o的欧拉距离;
[0031]
通过计算所述欧拉距离的平均值,其中所述m为距离的均值;
[0032]
通过计算所述第一方差,其中var为所述第一方差。
[0033]
第二方面,本发明提供一种用户意图识别装置,具有实现对应于上述第一方面提供的用户意图识别平台的方法的功能。所述功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块,所述模块可以是软件和/或硬件。
[0034]
所述用户意图识别装置包括:
[0035]
输入输出模块,用于获取用户的多个注视点位置信息;获取物体的二维质心坐标信息;获取用户的抓握位置信息;
[0036]
处理模块,用于通过滑动窗口技术、所述用户的多个注视点位置信息以及所述物体的二维质心坐标信息计算第一距离;通过滑动窗口技术、所述用户的多个注视点位置信
息以及所述用户的抓握位置信息计算至少两个第二距离向量;通过滑动窗口技术计算所述用户的多个注视点位置信息的方差,得到第一方差;将所述第一距离、所述第二距离向量以及所述第一方差输入至训练好的分类器,得到分类结果;根据所述分类结果得到用户意图。
[0037]
在一些可能的设计中,所述处理模块还用于:
[0038]
通过眼动仪获取用户的多张输入图像;
[0039]
通过f(t
i
)=(f
x
(t
i
),f
y
(t
i
))获取用户的多个注视点位置信息,其中t
i
表示对应第i帧所述注视图像的时刻,f
x
(t
i
)表示在第i帧所述注视图像的二维注视横坐标,f
y
(t
i
)表示在第i帧所述注视图像的二维注视纵坐标,f(t
i
)表示所述注视点位置信息。
[0040]
在一些可能的设计中,所述处理模块还用于:
[0041]
将所述多张输入图像输入至训练好的神经网络模型,得到多个像素坐标;
[0042]
通过计算所述物体的二维质心坐标信息,其中p
ij
为第i帧所述注视图像的第j个目标的像素值,x
ij
为第i帧所述注视图像的第j个目标的所述像素坐标的横坐标,y
ij
为第i帧所述注视图像的第j个目标的像素坐标的纵坐标,x,y为所述物体的二维质心坐标信息。
[0043]
在一些可能的设计中,所述处理模块还用于:
[0044]
获取数据库存储的抓握数据;
[0045]
通过统计分布获取食指抓握点坐标g1
xj
(t
i
),g1
yj
(t
i
);
[0046]
通过统计分布获取拇指抓握点坐标g2
xj
(t
i
),g2
yj
(t
i
)。
[0047]
在一些可能的设计中,所述处理模块还用于:
[0048]
通过计算所述第一距离,其中所述n为所述输入图像的数量,adf2c为所述第一距离。
[0049]
在一些可能的设计中,所述处理模块还用于:
[0050]
通过计算食指距离,其中adf2i为所述食指距离;
[0051]
通过计算拇指距离,其中adf2t为所述拇指距离;
[0052]
将所述食指距离以及拇指距离组合成第二距离向量。
[0053]
在一些可能的设计中,所述处理模块还用于:
[0054]
通过计算几何中心,其中o为几何中心;
[0055]
通过计算所述多个注视中心与所述几何中心的欧拉距离,其中d
i
表示第i个注视点到注视中心o的欧拉距离;
[0056]
通过计算所述欧拉距离的平均值,其中所述m为距离的均值;
[0057]
通过计算所述第一方差,其中var为所述第一方差。
[0058]
本发明又一方面提供了一种用户意图识别设备,其包括至少一个连接的处理器、存储器、输入输出单元,其中,所述存储器用于存储程序代码,所述处理器用于调用所述存储器中的程序代码来执行上述各方面所述的方法。
[0059]
本发明又一方面提供了一种计算机存储介质,其包括指令,当其在计算机上运行时,使得计算机执行上述各方面所述的方法。
[0060]
相较于现有技术,本申请提出了一种基于自然注视行为的抓握意图识别方法。获取注视信息、场景目标信息以及抓握点数据,通过算法计算抓握数据以及注视数据的方差以及距离,通过输出结果并通过算法直接区分患者对于视野中的哪个目标存在着抓握意图。本申请结合了机器学习技术和人类行为规律,获取用户在抓握行为和查看行为下的注视规律并训练意图识别分类器。当意图识别分类器能够在自然无负担的情况下获取用户意图。
附图说明
[0061]
图1-1为本发明实施例中用户意图识别方法的流程示意图;
[0062]
图1-2为本发明实施例中用户意图识别方法的场景识别示意图;
[0063]
图1-3为本发明实施例中用户意图识别方法的数据提取示意图;
[0064]
图1-4为本发明实施例中用户意图识别方法的分类结果实例示意图;
[0065]
图1-5为本发明实施例中用户意图识别方法的相关性分析示意图;
[0066]
图1-6为本发明实施例中用户意图识别方法的意图识别模型结构示意图;
[0067]
图1-7为本发明实施例中用户意图识别方法的第一距离分析示意图;
[0068]
图1-8为本发明实施例中用户意图识别方法的第二距离向量分析示意图;
[0069]
图1-9为本发明实施例中用户意图识别方法的第一方差分析示意图;
[0070]
图2为本发明实施例中用户意图识别装置的结构示意图;
[0071]
图3为本发明实施例中计算机设备的结构示意图。
[0072]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0073]
应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的实施例能够以除了在这里图示或描述的内容以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或模块的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或模块,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或模块,本发明中所出现的模块的划分,仅仅是一种逻辑上的划分,实际应用中实现时可以有另外的划分方式,例如多个模块可以结合成或集成在另一个系统中,或一些特征可以忽略,或不执行。
[0074]
请参照图1-1,以下对本发明提供一种用户意图识别方法进行举例说明,所述方法包括:
[0075]
101、获取用户的多个注视点位置信息。
[0076]
本实施例中,用户的注视信息通过眼动仪进行获取,眼动仪能够获得用户的注视信息,然后根据:
[0077]
duration
max
=400ms,duration
min
=80ms,dispersion
max
=3.01三个参数从注视信
[0078]
息中获得用户的注视点(gaze fixations)。在第i帧的注视点表示为:f(t
i
)=(f
x
(t
i
),f
y
(t
i
)),dispersion
max
:表示注视过程中所有凝视位置之间距离的阈值,duration
min
:表示两次注视未超过dispersion
max
的最小持续时间,duration
max
:表示两次注视未超过dispersion
max
的最大持续时间。
[0079]
102、获取物体的二维质心坐标信息。
[0080]
本实施例中,通过利用yolact方法识别输入图像中的物体信息,利用该方法识别场景中目标的类别和区域,再根据区域计算二位质心坐标。如图1-2所示,识别出场景中物体的类别和区域,然后对每个目标所占的区域就能够计算出这个目标的二维质心。
[0081]
103、获取用户的抓握位置信息。
[0082]
本实施例中,如图1-3所示,本文提出的识别方法的数据获取包括三个部分:用户注视信息获取(gaze),场景目标信息获取(object information)和抓握点信息获取(grasp infomation)。
[0083]
104、通过滑动窗口技术、所述用户的多个注视点位置信息以及所述物体的二维质心坐标信息计算第一距离。
[0084]
本实施例中,第一距离为一个滑动窗口周期中所有注视点到目标物体二维质心的平均距离。滑动窗口技术可以将双层嵌套的循环问题,转换为单层遍历的循环问题。比如:需要说明的是,在本申请实施例中,本领域技术人员可以理解,所涉及的滑动窗口技术即为现有技术中的滑动窗口算法。例如本领域技术人员可以理解,所涉及的滑动窗口技术即为现有技术中的通过使用特定大小的子列表,在遍历完整列表的同时进行特定的操作,以达到降低了循环的嵌套深度。
[0085]
105、通过滑动窗口技术、所述用户的多个注视点位置信息以及所述用户的抓握位置信息计算至少两个第二距离向量
[0086]
本实施例中,第二距离向量至少包括:在一个滑动窗口周期内所有注视点到食指抓握点的距离的平均值,以及表示在一个滑动窗口周期内所有注视点到拇指抓握点的距离的平均值。
[0087]
106、通过滑动窗口技术计算所述用户的多个注视点位置信息的方差,得到第一方差。
[0088]
本实施例中,第一方差为一个滑动窗口周期内,所有注视点到注视点中心的距离的方差。
[0089]
107、将所述第一距离、所述第二距离向量以及所述第一方差输入至训练好的分类器,得到分类结果。
[0090]
本实施例中,所选择的备选模型包括:svm(linear),svm(guass),sgd,knn,dt。在训练过程中将带有标签的样本(抓握/查看)和与之对应的特征输入不同的分类器进行训
练,完成训练后进行测试,选择准确率较高的分类器作为意图识别的模型。分类的结果的实例如图1-4所示。
[0091]
108、根据所述分类结果得到用户意图。
[0092]
本实施例中,分类结果的相关性分析如图1-5所示,根据相关性结果分析,抓握和查看两种任务对所提出的特征具有不同影响,这使得这些特征在不同意图下表现出明显的不同。
[0093]
本实施例中,意图识别的整体结构如图1-6所示。在完成意图识别模型训练之后,用户使用眼动仪观察目标。算法会自动提取用户的注视点,物体的二维质心和用户的抓握点。根据这些信息计算文中所提出的多种特征并输入意图识别模型,意图识别模型会根据输入的判读出用户的当前意图并控制智能设备完成动作。
[0094]
相较于现有技术,相较于现有技术,本申请提出了一种基于自然注视行为的抓握意图识别方法。获取注视信息、场景目标信息以及抓握点数据,通过算法计算抓握数据以及注视数据的方差以及距离,通过输出结果并通过算法直接区分患者对于视野中的哪个目标存在着抓握意图。本申请结合了机器学习技术和人类行为规律,获取用户在抓握行为和查看行为下的注视规律并训练意图识别分类器。当意图识别分类器能够在自然无负担的情况下获取用户意图
[0095]
一些实施方式中,所述获取用户的多个注视点位置信息,包括:
[0096]
通过眼动仪获取用户的多张输入图像;
[0097]
通过f(t
i
)=(f
x
(t
i
),f
y
(t
i
))获取用户的多个注视点位置信息,其中t
i
表示对应第i帧所述注视图像的时刻,f
x
(t
i
)表示在第i帧所述注视图像的二维注视横坐标,f
y
(t
i
)表示在第i帧所述注视图像的二维注视纵坐标,f(t
i
)表示所述注视点位置信息。
[0098]
上述实施方式中,用户的注视信息通过眼动仪进行获取,眼动仪能够获得
[0099]
用户的注视信息,然后根据:
[0100]
duration
max
=400ms,duration
min
=80ms,dispersion
max
=3.01三个参数从注视信
[0101]
息中获得用户的注视点(gaze fixations)。在第i帧的注视点表示为:f(t
i
)=(f
x
(t
i
),f
y
(t
i
)),dispersion
max
:表示注视过程中所有凝视位置之间距离的阈值,duration
min
:表示两次注视未超过dispersion
max
的最小持续时间,duration
max
:表示两次注视未超过dispersion
max
的最大持续时间。
[0102]
一些实施方式中,所述获取物体的二维质心坐标信息,包括:
[0103]
将所述多张输入图像输入至训练好的神经网络模型,得到多个像素坐标;
[0104]
通过计算所述物体的二维质心坐标信息,其中p
ij
为第i帧所述注视图像的第j个目标的像素值,x
ij
为第i帧所述注视图像的第j个目标的所述像素坐标的横坐标,y
ij
为第i帧所述注视图像的第j个目标的像素坐标的纵坐标,x,y为所述物体的二维质心坐标信息。
[0105]
上述实施方式中,通过利用yolact方法识别输入图像中的物体信息,利用该方法识别场景中目标的类别和区域,再根据区域计算二位质心坐标。如图1-2所示,识别出场景中物体的类别和区域,然后对每个目标所占的区域就能够计算出这个目标的二维质心。
[0106]
一些实施方式中,所述获取用户的抓握位置信息,包括:
[0107]
获取数据库存储的抓握数据;
[0108]
通过统计分布获取食指抓握点坐标g1
xj
(t
i
),g1
yj
(t
i
);
[0109]
通过统计分布获取拇指抓握点坐标g2
xj
(t
i
),g2
yj
(t
i
)。
[0110]
上述实施方式中,如图1-3所示,本文提出的识别方法的数据获取包括三个部分:用户注视信息获取(gaze),场景目标信息获取(object information)和抓握点信息获取(grasp infomation)。
[0111]
一些实施方式中,所述通过滑动窗口技术、所述用户的多个注视点位置信息以及所述物体的二维质心坐标信息计算第一距离,包括:
[0112]
通过计算所述第一距离,其中所述n为所述输入图像的数量,adf2c为所述第一距离。
[0113]
上述实施方式中,如图1-7所示特征adf2c在两种不同意图下的结果。从图像和相关性分析结果可知不同意图下该特征区分并不是很明显,但是存在一定的差别。
[0114]
一些实施方式中,所述通过滑动窗口技术、所述用户的多个注视点位置信息以及所述用户的抓握位置信息计算至少两个第二距离向量,包括:
[0115]
通过计算食指距离,其中adf2i为所述食指距离;
[0116]
通过计算拇指距离,其中adf2t为所述拇指距离;
[0117]
将所述食指距离以及拇指距离组合成第二距离向量。
[0118]
上述实施方式中,如图1-8所示特征adf2t,adf2i在两种不同意图下的结果。从图像可以看出这两种特征在不同意图下存在明显的差别的,且在抓握任务中,用户倾向于观察食指的抓握位置。这可以用于识别用户的抓握意图。
[0119]
一些实施方式中,所述通过滑动窗口技术计算所述用户的多个注视点位置信息的方差,得到第一方差,包括
[0120]
通过计算几何中心,其中o为几何中心;
[0121]
通过计算所述多个注视中心与所述几何中心的欧拉距离,其中d
i
表示第i个注视点到注视中心o的欧拉距离;
[0122]
通过计算所述欧拉距离的平均值,其中所述m为距离的均值;
[0123]
通过计算所述第一方差,其中var为所述第一方差。
[0124]
上述实施方式中,如图1-9所示特征var在两种不同意图下的结果。该特征用户有抓握意图时值较小,这个特征反映出了用户在抓握时,注视点的相对更加集中,在多数情况下更加集中在食指的抓握位置。可以利用此信息来区分用户是否存在抓握意图。
[0125]
如图2所示的一种用户意图识别装置20的结构示意图,其可应用于用户意图识别。
本发明实施例中的用户意图识别装置能够实现对应于上述图1-1所对应的实施例中所执行的用户意图识别方法的步骤。用户意图识别装置20实现的功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块,所述模块可以是软件和/或硬件。所述用户意图识别装置可包括输入输出模块201和处理模块202,所述处理模块202和输入输出模块201的功能实现可参考图1-1所对应的实施例中所执行的操作,此处不作赘述。输入输出模块201可用于控制所述输入输出模块201的输入、输出以及获取操作。
[0126]
一些实施方式中,所述输入输出模块201可用于获取用户的多个注视点位置信息;获取物体的二维质心坐标信息;获取用户的抓握位置信息;
[0127]
所述处理模块202可用于通过滑动窗口技术、所述用户的多个注视点位置信息以及所述物体的二维质心坐标信息计算第一距离;通过滑动窗口技术、所述用户的多个注视点位置信息以及所述用户的抓握位置信息计算至少两个第二距离向量;通过滑动窗口技术计算所述用户的多个注视点位置信息的方差,得到第一方差;将所述第一距离、所述第二距离向量以及所述第一方差输入至训练好的分类器,得到分类结果;根据所述分类结果得到用户意图。
[0128]
一些实施方式中,所述处理模块202还用于:
[0129]
通过眼动仪获取用户的多张输入图像;
[0130]
通过f(t
i
)=(f
x
(t
i
),f
y
(t
i
))获取用户的多个注视点位置信息,其中t
i
表示对应第i帧所述注视图像的时刻,f
x
(t
i
)表示在第i帧所述注视图像的二维注视横坐标,f
y
(t
i
)表示在第i帧所述注视图像的二维注视纵坐标,f(t
i
)表示所述注视点位置信息。
[0131]
一些实施方式中,所述处理模块202还用于:
[0132]
将所述多张输入图像输入至训练好的神经网络模型,得到多个像素坐标;
[0133]
通过计算所述物体的二维质心坐标信息,其中p
ij
为第i帧所述注视图像的第j个目标的像素值,x
ij
为第i帧所述注视图像的第j个目标的所述像素坐标的横坐标,y
ij
为第i帧所述注视图像的第j个目标的像素坐标的纵坐标,x,y为所述物体的二维质心坐标信息。
[0134]
一些实施方式中,所述处理模块202还用于:
[0135]
获取数据库存储的抓握数据;
[0136]
通过统计分布获取食指抓握点坐标g1
xj
(t
i
),g1
yj
(t
i
);
[0137]
通过统计分布获取拇指抓握点坐标g2
xj
(t
i
),g2
yj
(t
i
)。
[0138]
一些实施方式中,所述处理模块202还用于:
[0139]
通过计算所述第一距离,其中所述n为所述输入图像的数量,adf2c为所述第一距离。
[0140]
一些实施方式中,所述处理模块202还用于:
[0141]
通过计算食指距离,
其中adf2i为所述食指距离;
[0142]
通过计算拇指距离,其中adf2t为所述拇指距离;
[0143]
将所述食指距离以及拇指距离组合成第二距离向量。
[0144]
一些实施方式中,所述处理模块202还用于:
[0145]
通过计算几何中心,其中o为几何中心;
[0146]
通过计算所述多个注视中心与所述几何中心的欧拉距离,其中d
i
表示第i个注视点到注视中心o的欧拉距离;
[0147]
通过计算所述欧拉距离的平均值,其中所述m为距离的均值;
[0148]
通过计算所述第一方差,其中var为所述第一方差。
[0149]
上面从模块化功能实体的角度分别介绍了本发明实施例中的创建装置,以下从硬件角度介绍一种计算机设备,如图3所示,其包括:处理器、存储器、输入输出单元(也可以是收发器,图3中未标识出)以及存储在所述存储器中并可在所述处理器上运行的计算机程序。例如,该计算机程序可以为图1-1所对应的实施例中用户意图识别方法对应的程序。例如,当计算机设备实现如图2所示的用户意图识别装置20的功能时,所述处理器执行所述计算机程序时实现上述图2所对应的实施例中由用户意图识别装置20执行的用户意图识别方法中的各步骤。或者,所述处理器执行所述计算机程序时实现上述图2所对应的实施例的用户意图识别装置20中各模块的功能。又例如,该计算机程序可以为图1-1所对应的实施例中用户意图识别方法对应的程序。
[0150]
所称处理器可以是中央处理单元(central processing unit,cpu),还可以是其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现成可编程门阵列(field-programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等,所述处理器是所述计算机装置的控制中心,利用各种接口和线路连接整个计算机装置的各个部分。
[0151]
所述存储器可用于存储所述计算机程序和/或模块,所述处理器通过运行或执行存储在所述存储器内的计算机程序和/或模块,以及调用存储在存储器内的数据,实现所述计算机装置的各种功能。所述存储器可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序(比如声音播放功能、图像播放功能等)等;存储数据区可存储根据手机的使用所创建的数据(比如音频数据、视频数据等)等。此外,存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如硬盘、内存、插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)、至少一个磁盘存储器件、闪存器件、或其他易失性固态存储器件。
[0152]
所述输入输出单元也可以用接收器和发送器代替,可以为相同或者不同的物理实体。为相同的物理实体时,可以统称为输入输出单元。该输入输出可以为收发器。
[0153]
所述存储器可以集成在所述处理器中,也可以与所述处理器分开设置。
[0154]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如rom/ram)中,包括若干指令用以使得一台终端(可以是手机,计算机,服务器或者网络设备等)执行本发明各个实施例所述的方法。
[0155]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1