一种基于聚类分析的飞行物目标对受保护低空无人机的威胁度识别方法与流程
[0001]
本发明属于信息技术领域,涉及一种低空安防技术,具体地说是涉及一种基于聚类分析的飞行物目标对受保护低空无人机的威胁度识别方法。
背景技术:
[0002]
威胁度评估一词,最早来源于防空作战。它是作战部队进行情报收集信息处理后,做出火力安排的前提和核心。虽然应用范围较广,但是在国际上很少公开讨论,在国内讨论也相对较少。低空飞行物在防空领域中,由于具有低空飞行,速度慢,不容易被发现等特点,给低空航线带内携带任务的低空无人机带来极大的威胁和挑战,及时对低空飞行物作出威胁判断,对低空防空具有重要的意义。
[0003]
现有技术中也有低空飞行物的威胁度评估方法的公开,例如中国专利cn 111413681a公开了一种基于熵权法的飞行目标威胁度识别方法、系统和存储介质,其中方法包括以下步骤:获取雷达数据,所述雷达数据包括若干个飞行目标的起批数据;根据起批数据对飞行目标的记录表进行更新处理,以及对起批数据进行规范化处理;结合规范化处理后的起批数据和熵权法计算飞行目标对应的威胁度值,获得威胁度识别结果。但是,其威胁度评估方法只适用于受保护对象为固定不动的建筑物或者某种固定不动的其他物体,不适用于对移动的受保护低空无人机对象进行威胁等级识别。
[0004]
另外,现有的威胁度评估方法,大部分还是采用获取数据,通过一些加权算法对数据进行处理运算,随着大数据来临,这些威胁度评估方法会显得运算缓慢。
[0005]
目前,威胁评估获取的数据多为受保护对象所携带的雷达获取的,例如cn 111086616a,其所获取的数据多由无人艇上雷达采集获取,其测得的数据很多时候并不全面。
技术实现要素:
[0006]
为了克服现有技术存在的不足,本发明提供了一种基于聚类分析的飞行物目标对受保护低空无人机的威胁度识别方法。
[0007]
本发明采用的技术方案为:
[0008]
一种基于聚类分析的飞行物目标对受保护低空无人机威胁度识别方法,包括以下步骤:
[0009]
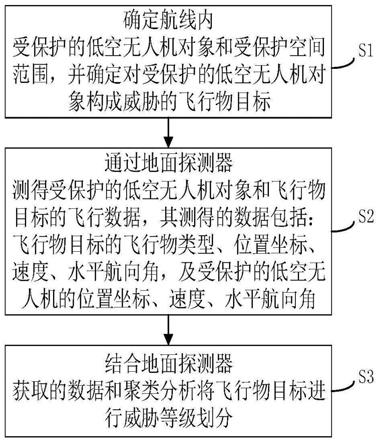
s1:确定低空航线带内受保护的低空无人机对象及其受保护空间范围,并确定对受保护的低空无人机对象构成威胁的飞行物目标;
[0010]
s2:通过地面探测器测得受保护的低空无人机对象和飞行物目标的飞行数据,其测得的数据包括:飞行物目标的飞行物类型、位置坐标、速度、水平航向角,及受保护的低空无人机的位置坐标、速度、水平航向角;
[0011]
s3:结合地面探测器获取的数据和聚类分析将飞行物目标进行威胁等级划分。
[0012]
作为优选,步骤s1具体为:
[0013]
选取在低空固定航线内飞行的低空无人机作为受保护的对象,低空无人机的受保护空间范围是以低空无人机质心为球心,半径为k的球与低空航线带上界与下界相交的范围内,k的取值为该球体与低空航线带上界或低空航线带下界相切的这两种情况下的最大球半径;
[0014]
选取在低空无人机受保护空间范围内出现的飞行物作为对受保护的低空无人机构成威胁的飞行物目标。
[0015]
作为优选,s3包括以下步骤:
[0016]
s301:基于地面探测器测得的数据,选取飞行物目标对低空无人机构成威胁的五个威胁度评估因子;
[0017]
s302:根据五个威胁度评估因子,构建五个威胁度评估因子的隶属度函数,将测得的数据量化在[0,1]区间内;
[0018]
s303:对每个飞行物目标的五个威胁度评估因子的隶属度函数的量化值采用熵的方法,求解出每个飞行物目标的五个威胁度评估因子的权重;
[0019]
s304:根据每个飞行物目标的五个威胁度评估因子的权重,构建一个权重频率计算函数,以此来表现飞行物目标飞行的稳定性;
[0020]
s305:将各个飞行物目标的五个威胁度因子的隶属度函数的量化值和建立的权重频率计算函数值作为聚类算法k的输入,通过聚类分析将飞行物目标进行威胁等级划分。
[0021]
作为优选,s301中五个威胁度评估因子包括:飞行物目标类别、飞行物目标的武装性能、受保护的低空无人机与飞行物目标间的相对距离、受保护的低空无人机与飞行物目标间的水平航向角关系、受保护的低空无人机与飞行物目标间的相对速度。
[0022]
作为优选,s302中飞行物目标类别隶属度函数f
类别
:
[0023][0024]
飞行物目标武装性能隶属度函数f
武装
:
[0025][0026]
受保护的低空无人机与飞行物目标间的相对距离隶属度函数f
距离
:
[0027][0028]
其中d为受保护的低空无人机与飞行物目标间的相对距离,h为航线带上界与下界的距离,k为受保护低空无人机受保护范围的最大球半径;
[0029]
受保护的低空无人机与飞行物目标间的水平航向角关系隶属度函数f
航向角
:
[0030]
f
航向角
=|sin(|θ
2-θ1|)|θ1∈[0
°
,360
°
],θ2∈[0
°
,360
°
]
[0031]
其中θ2为飞行物目标的水平航向角,θ1为受保护的低空无人机目标的水平航向角;
[0032]
受保护的低空无人机与飞行物目标间的相对速度隶属度函数f
相对速度
:
[0033][0034]
其中v2为飞行物目标的瞬时速度,v1为受保护的低空无人机目标的瞬时速度。
[0035]
作为优选,步骤s303具体为:
[0036]
第一步,有n个飞行物,五个威胁度因子,首先构造目标属性矩阵a=[a
ij
]
n
×5;
[0037]
其中n代表受保护范围内出现的飞行物个数,i代表n个飞行物中具体的第i个飞行物,j代表五个威胁度因子中的第j个威胁度因子,a
ij
表示第i个飞行物的第j个威胁因子的值,a表示a
ij
的值构成的n
×
5阶矩阵;
[0038]
第二步,目标属性矩阵进行规范化过程如下,目标属性矩阵为a=[a
ij
]
n
×5,将其进行规范化后的决策矩阵r=[r
ij
]
n
×5:
[0039][0040]
其中r表示规范化后的n
×
5阶决策矩阵,r
ij
表示第i个飞行物的第j个威胁因子规范化后的值;
[0041]
第三步,计算第j个威胁度评估因子下第i个飞行物的指标值的比重p
ij
:
[0042][0043]
其中p
ij
表示第j个威胁度评估因子下第i个飞行物的指标值的比重;
[0044]
第四步,计算第j个威胁度评估因子的熵值e
j
:
[0045]
其中,k=1/lnn
[0046]
其中e
j
表示j个威胁度评估因子的熵值;
[0047]
第五步,计算第j个威胁度评估因子的熵权重w
j
:
[0048][0049]
其中w
j
表示第j个威胁度评估因子的熵权重。
[0050]
作为优选,步骤s304具体为:综合每个飞行物目标的五个威胁度评估因子的权重前后时间变化,通过计算任意两个前后两个时间t1,t2内五个威胁度评估因子w
j
差值,构建一个关于威胁度评估因子权重w
j
的频率计算函数:
[0051]
f
频率
=f(w
jt2-w
jt1
)
[0052]
其中w
jt2
,w
jt1
分别表示t2,t1两个时刻第j个威胁度评估因子的熵权重;
[0053]
在受保护的低空无人机对象的受保护空间范围内,权重频率计算值高的飞行物目标飞行不稳定,权重频率计算值低的飞行物目标飞行稳定。
[0054]
作为优选,步骤s305具体为:
[0055]
根据地面探测器测得飞行物t1,t2两个时刻内的数据集d1={x1,x2,x3,...,x
a
},d2={x1',x2',x3',...,x
a
'}均包含a个样本,对于d1每个样本x
s
=(f
类别
,f
武装
,f
距离
,f
航向角
,f
相对速度
),s∈{1,2,...,a}是五维样本空间内的一个特征向量,同样对于d2每个样本x
s
'=(f
类别
',f
武装
',f
距离
',f
航向角
',f
相对速度
'),s'∈{1,2,...,a}是五维样本空间内的一个特征向量,取这两个时刻的五维特征向量每个维度的平均数重新构成新的五维向量s∈{1,2,...,a},再将此五维特征向量与t1,t2两个时刻五维特征向量x
s
,x
′
s
算得的频率计算函数构成一个六维特征向量g∈{1,2,...,a}依此六维特征向量可以将d1,d2组成一个新的数据集d3={x1″
,x2″
,x3″
,...,x
a
″
};
[0056]
用聚类算法k将样本集d3划分为p个不相交的簇,表示将样本集分成了p个不同的威胁度等级,每一簇得到一个质心向量e
h
=(e
h0
,e
h1
,e
h2
,e
h3
,e
h4
,e
h5
),h∈{1,2,...,p},对每簇样本引入一个簇标记λ={λ1,λ2,...,λ
p
},将簇标记与质心向量间构建一个函数关系式λ
q
=z(e
h
),q∈{1,2,...,p},每个簇标记λ
q
值表示威胁度的一个威胁等级,属于该质心范围内飞行物数据与质心的威胁度等级相同,将λ
q
的值进行一个从大到小的排序,则将每个飞行物对低空无人机的威胁度进行了一个威胁等级划分。
[0057]
本发明首先确定航线内受保护的低空无人机对象及其受保护空间范围,并确定对受保护的低空无人机对象构成威胁的飞行物目标;然后通过地面探测器测得受保护的低空无人机对象和飞行物目标的飞行数据,最后结合地面探测器获取后的数据和聚类分析将飞行物目标进行威胁等级划分。
[0058]
本发明的技术效果在于:
[0059]
本发明能够实现对移动的受保护低空无人机对象进行威胁等级识别,通过采用机器学习中的聚类算法可以明显提高数据的处理计算能力,另外,受保护对象为低空无人机,可通过地面探测器测得数据,其测得的数据较雷达获取的数据更为丰富全面;本发明能够实现对多变动态环境下空中运动目标很好的动态威胁度预测评估。
附图说明
[0060]
图1是本发明识别方法的步骤流程图;
[0061]
图2是结合地面雷达获取的数据和聚类分析将飞行物目标进行威胁等级划分的步骤流程图;
[0062]
图3是确定受保护的低空无人机对象的受保护空间范围的截面图示。
具体实施方式
[0063]
下面结合附图和具体实施例对本发明作进一步说明,但本发明所要保护的范围并不限于此。
[0064]
参照图1~3,一种基于聚类分析的飞行物目标对受保护低空无人机威胁度识别方法,包括以下步骤:
[0065]
s1:确定低空航线带内受保护的低空无人机对象及其受保护空间范围,并确定对受保护的低空无人机对象构成威胁的飞行物目标;
[0066]
选取在低空固定航线内飞行的低空无人机作为受保护的对象,低空无人机的受保护空间范围是以低空无人机质心为球心,半径为k的球与低空航线带上界与下界相交的范围内,k的取值为该球体与低空航线带上界或低空航线带下界相切的这两种情况下的最大球半径,如图3所示;
[0067]
选取在低空无人机受保护空间范围内出现的飞行物作为对受保护的低空无人机构成威胁的飞行物目标;
[0068]
s2:通过地面探测器测得受保护的低空无人机对象和飞行物目标的飞行数据,其测得的数据包括:飞行物目标的飞行物类型、位置坐标、速度、水平航向角,及受保护的低空无人机的位置坐标、速度、水平航向角;
[0069]
s3:结合地面探测器获取的数据和聚类分析将飞行物目标进行威胁等级划分,具体包括以下步骤:
[0070]
s301:基于地面探测器测得的数据,选取飞行物目标对低空无人机构成威胁的五个威胁度评估因子;
[0071]
五个威胁度评估因子包括:飞行物目标类别、飞行物目标的武装性能、受保护的低空无人机与飞行物目标间的相对距离、受保护的低空无人机与飞行物目标间的水平航向角关系、受保护的低空无人机与飞行物目标间的相对速度;
[0072]
s302:根据五个威胁度评估因子,构建五个威胁度评估因子的隶属度函数,将测得的数据量化在[0,1]区间内;
[0073]
飞行物目标类别隶属度函数f
类别
:
[0074][0075]
飞行物目标武装性能隶属度函数f
武装
:
[0076][0077]
受保护的低空无人机与飞行物目标间的相对距离隶属度函数f
距离
:
[0078][0079]
其中d为受保护的低空无人机与飞行物目标间的相对距离,h为航线带上界与下界的距离,k为受保护低空无人机受保护范围的最大球半径;
[0080]
受保护的低空无人机与飞行物目标间的水平航向角关系隶属度函数f
航向角
:
[0081]
f
航向角
=|sin(|θ
2-θ1|)|θ1∈[0
°
,360
°
],θ2∈[0
°
,360
°
]
[0082]
其中θ2为飞行物目标的水平航向角,θ1为受保护的低空无人机目标的水平航向角;
[0083]
受保护的低空无人机与飞行物目标间的相对速度隶属度函数f
相对速度
:
[0084][0085]
其中v2为飞行物目标的瞬时速度,v1为受保护的低空无人机目标的瞬时速度;
[0086]
s303:对每个飞行物目标的五个威胁度评估因子的隶属度函数的量化值采用熵的方法,求解出每个飞行物目标的五个威胁度评估因子的权重;具体为:
[0087]
第一步,有n个飞行物,五个威胁度因子,首先构造目标属性矩阵a=[a
ij
]
n
×5;
[0088]
其中n代表受保护范围内出现的飞行物个数,i代表n个飞行物中具体的第i个飞行物,j代表五个威胁度因子中的第j个威胁度因子,a
ij
表示第i个飞行物的第j个威胁因子的值,a表示a
ij
的值构成的n
×
5阶矩阵。
[0089]
第二步,目标属性矩阵进行规范化过程如下,目标属性矩阵为a=[a
ij
]
n
×5,将其进行规范化后的决策矩阵r=[r
ij
]
n
×5:
[0090][0091]
其中r表示规范化后的n
×
5阶决策矩阵,r
ij
表示第i个飞行物的第j个威胁因子规范化后的值。
[0092]
第三步,计算第j个威胁度评估因子下第i个飞行物的指标值的比重p
ij
:
[0093]
[0094]
其中p
ij
表示第j个威胁度评估因子下第i个飞行物的指标值的比重。
[0095]
第四步,计算第j个威胁度评估因子的熵值e
j
:
[0096]
其中,k=1/lnn
[0097]
其中e
j
表示j个威胁度评估因子的熵值。
[0098]
第五步,计算第j个威胁度评估因子的熵权重w
j
:
[0099][0100]
其中w
j
表示第j个威胁度评估因子的熵权重。
[0101]
s304:根据每个飞行物目标的五个威胁度评估因子的权重,构建一个权重频率计算函数,以此来表现飞行物目标飞行的稳定性;
[0102]
综合每个飞行物目标的五个威胁度评估因子的权重前后时间变化,通过计算任意两个前后两个时间t1,t2内五个威胁度评估因子w
j
差值,构建一个关于威胁度评估因子权重w
j
的频率计算函数:
[0103]
f
频率
=f(w
jt2-w
jt1
)
[0104]
其中w
jt2
,w
jt1
分别表示t2,t1两个时刻第j个威胁度评估因子的熵权重。
[0105]
其中f
频率
=f(w
jt2-w
jt1
)可表示为:
[0106][0107]
其中[]表示取整函数,表示在(1,10)之间的任意常量,f
频率
单位为:次/秒
[0108]
在受保护的低空无人机对象的受保护空间范围内,权重频率计算值高的飞行物目标飞行不稳定,权重频率计算值低的飞行物目标飞行稳定。
[0109]
s305:将各个飞行物目标的五个威胁度因子的隶属度函数的量化值和建立的权重频率计算函数值作为聚类算法k的输入,通过聚类分析将飞行物目标进行威胁等级划分;
[0110]
根据地面探测器测得低空无人机受保护范围内出现的60个飞行物t1,t2两个时刻内的数据集d1={x1,x2,x3,...,x
60
},d2={x1',x2',x3',...,x
60
'}均包含60个样本,对于d1每个样本x
s
=(f
类别
,f
武装
,f
距离
,f
航向角
,f
相对速度
),s∈{1,2,...,60}是五维样本空间内的一个特征向量,同样对于d2每个样本x
s
'=(f
类别
',f
武装
',f
距离
',f
航向角
',f
相对速度
'),s'∈{1,2,...,60}是五维样本空间内的一个特征向量,取这两个时刻的五维特征向量每个维度的平均数重新构成新的五维向量s∈{1,2,...,60},再将此五维特征向量与t1,t2两个时刻五维特征向量x
s
,x
′
s
算得的频率计算函数构成一个六维特征向量g∈{1,2,...,60}依此六维特征向量可以将d1,d2组成一个新的数据集d3={x1″
,x2″
,x3″
,...,x
60
″
}。
[0111]
用聚类算法k将样本集d3划分为3个不相交的簇,表示将样本集分成了3个不同的威胁度等级,即将60个飞行物分为3个不同威胁度等级,每一簇得到一个质心向量e1=(0.1,0.3,0.7,0.2,0.4,3)、e2=(0.3,0.7,0.6,0.4,0.7,5)、e3=(0.8,0.7,1.0,0.4,0.8,10),每簇样本引入一个簇标记λ={λ1,λ2,λ3},将簇标记与质心向量间构建一个函数关系式
λ
q
=z(e
h
),其中该函数关系式可表示为其中[]表示取整函数,计算得λ=(7,4,3),则这三个不同簇内的数据被分为7,4,3三个不同威胁度等级,即这60个飞行物被划分为7,4,3这三个不同威胁等级,其中λ
q
值越小,威胁度越高。
[0112]
应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1