基于安全等级的地图分析与寻优路径算法结合的工业建筑视频监控安装方法与流程
[0001]
本发明属于信息技术领域,涉及一种视频监控安装方法,具体地说是涉及一种基于安全等级的地图分析与寻优路径算法结合的工业建筑视频监控安装方法。
背景技术:
[0002]
现代化工厂建筑多存在诸多监控需求,如对出入库物体的监控、对危险入侵物的预防等,监控的安装能够有效满足此类需求。现代化工厂建筑存在建筑多为四边形,呈行列式分布,十分有序。根据此类特点,将地图信息以栅格图的形式表示,可直观的表达各建筑物与道路的位置关系,并有效进行监控摄像头的布置。
[0003]
而在传统方法中,根据不同的工厂建筑分别设计监控安装方案,在监控安装过程中存在耗费时间严重且会存在监控死区的情况,往往还需要安装更多的摄像头,更加重了监控方案的成本,也让电线布局更加复杂,不利于定时的维修检查。
技术实现要素:
[0004]
为了克服现有技术存在的不足,本发明提供了一种基于安全等级的地图分析与寻优路径算法结合的工业建筑视频监控安装方法。
[0005]
本发明采用的技术方案为:
[0006]
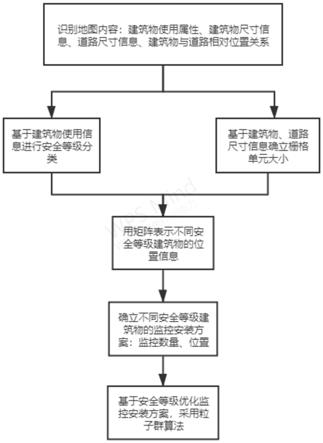
一种基于不同安全等级的地图分析与寻优路径算法结合的工业建筑监控安装方法,包括下述步骤:
[0007]
步骤1:识别获取的地图m
a
,根据识别内容中的建筑物使用属性对建筑物进行安全等级分类,统计不同等级建筑物数量;
[0008]
步骤2:基于步骤1中识别内容中的建筑物、道路、绿化地带的长度与宽度的关系,确立栅格地图中栅格单元的大小;基于步骤1识别内容中的建筑物、绿化与道路的相对位置关系,根据各类建筑的安全等级分类用矩阵表示获取地图m
a
的栅格图m
b
;
[0009]
步骤3:基于对特定道路区域进出监控的监控原则与步骤1中划分后不同安全等级的建筑物,确立每一安全等级建筑物的监控安装方案,包括依据不同起点至目标建筑物的路径规划、确立监控摄像安装个数与位置;
[0010]
步骤4:基于步骤3中确立的每一安全等级建筑物的监控安装方案,根据安全等级不同做方案优化,包括监控摄像头的个数、安装位置。
[0011]
作为优选,所述步骤1具体为:
[0012]
地图m
a
为语义地图,即地图中包含各个建筑的使用属性;基于地图中图像里的形状和颜色特征识别获取的地图m
a
,可识别其为建筑物、绿化与道路;建立平面直角坐标系,基于平面直角坐标系的方式,识别各建筑物、绿化与道路在此坐标系下的位置,即可得到它们的相对位置关系;
[0013]
为将地图m
a
各个建筑的使用属性与所识别到的建筑相对应,已知获得地图m
a
的各
个建筑的经纬度,可得知各个建筑的相对位置关系与各建筑在地图上的相对位置关系;通过前后相对位置对应,可确定识别出的各个建筑的使用属性;根据建筑物的使用属性,将其分为n类安全等级,如下所示:
[0014][0015]
g
a
表示建筑物的安全等级;
[0016]
统计数量:对各安全等级建筑物进行计数,如式(1)所示:
[0017]
q
n
=count(g
a
=n)
ꢀꢀꢀ
(1)
[0018]
q
n
表示安全等级为n的建筑物数量,count表示计数;
[0019]
地图m
a
识别内容包括:建筑物、绿化与道路的相对位置关系;建筑物长度、宽度;建筑物使用属性;道路长度、宽度;绿化地带长度、宽度;建筑入口e
a
、e
b
...e
o
。
[0020]
根据建筑物使用属性对建筑物进行安全等级分类,例如总共分为五级,其分类依据为:
[0021]
一级:绿化地带;
[0022]
二级:住宅区域,包括生活住宅,工人餐厅,健身房区域;
[0023]
三级:办公区域,包括办公楼;
[0024]
四级:普通工业建筑,包括制造、加工、贮存普通工业材料的工业厂房和库房;
[0025]
五级:高危工业建筑,包括制造、加工、贮存爆炸危险品的工业厂房和库房;
[0026]
按安全等级分类进行各建筑物数量统计:二级建筑物数量为p2,三级建筑物数量为p3,四级建筑物数量为p4,五级建筑物数量为p5。
[0027]
作为优选,步骤2中栅格单元大小的计算公式为:
[0028]
(i)预处理:对获得的数据建筑物长度l
bi
、建筑物宽度w
bi
,绿化带长度l
gi
、绿化带宽度w
gi
,道路长度l
ri
、道路宽度w
ri
进行四舍五入的数据处理,保留小数位为5的数;
[0029]
(ii)计算栅格地图中栅格单元长度如式(2)、(3)所示:
[0030]
l
c
=cf
m
(l
bi
,l
gi
,l
ri
)
ꢀꢀꢀ
(2)
[0031]
若预处理后的数据均为整数,则l
c
表示栅格地图中栅格单元的长度,l
bi
表示建筑物长度,l
gi
表示绿化带长度,l
ri
表示道路长度,cf
m
表示求其最大公因数;
[0032][0033]
若预处理后的数据有小数,则l
c
表示栅格地图中栅格单元的长度,l
bi
表示建筑物长度,l
gi
表示绿化带长度,l
ri
表示道路长度,cf
m
表示求其最大公因数;
[0034]
(iii)计算栅格地图中栅格单元宽度如式(4)、(5)所示:
[0035]
w
c
=cf
m
(w
bi
,w
gi
,w
ri
)
ꢀꢀꢀ
(4)
[0036]
若预处理后的数据均为整数,则w
c
表示栅格地图中栅格单元宽度,w
bi
表示建筑物宽度,w
gi
表示绿化带宽度,w
ri
表示道路宽度,cf
m
表示求其最大公因数;
[0037][0038]
若预处理后的数据有小数,则w
c
表示栅格地图中栅格单元的宽度,w
bi
表示建筑物长度,w
gi
表示绿化带长度,w
ri
表示道路长度,cf
m
表示求其最大公因数;
[0039]
(iv)栅格地图中栅格单元大小计算如式(7)所示:
[0040]
d
a
=l
c
×
w
c
ꢀꢀꢀ
(6)
[0041]
d
a
表示栅格单元的大小,l
c
表示栅格单元的长度,w
c
表示栅格单元的宽度;
[0042]
(v)确定比例尺关系为p。
[0043]
如实际需求的栅格图大小为50cm
×
50cm,实际建筑的大小为1000m
×
1000m,则比例尺关系p=1∶2000。
[0044]
作为优选,步骤3中建筑与道路关系可如此表示:
[0045]
基于步骤1识别内容中的建筑物、绿化与道路的相对位置关系,对栅格图中的单元进行排序处理,按照矩阵的第某个元素进行排列(形成m行n列);
[0046]
栅格单元c
ij
对应于栅格图的第m(i-1)+j单元,其中,1≤i≤m,1≤j≤n;
[0047]
例如c
34
对应于第m(3-1)+4个单元,即2m+4个单元;
[0048]
基于步骤1识别内容中的建筑物、绿化与道路的相对位置关系与确立的栅格单元的大小,矩阵中各元素的数值代表了其为道路或建筑物,在矩阵中表示可清晰明了的表示在栅格图下建筑物与道路之间的位置关系;
[0049]
建筑物与道路关系表示为:
[0050][0051]
z1为表示建筑物与道路关系的矩阵,z
mn
由0或1表示,0表示道路,1表示建筑物(若元素为0则为道路,1则为建筑物,而1,2,3...只是表示顺序,从栅格单元的大小以及建筑物、绿化的关系确认的);
[0052]
不同安全等级建筑物与道路的关系表示为:
[0053][0054]
z
u
为表示建筑物与道路关系的矩阵,z
mn
由0或u表示,0表示道路,u表示安全等级为u的建筑物;
[0055]
例如在三级建筑矩阵中,z
11
、z
12
、z
22
为三级建筑,则
[0056][0057]
监控原则为:目标为只监控道路上的进出情况,并实行对监控对象进出中的全面区域监控;作为优选,所述步骤4具体为:
[0058]
a.确立终点坐标
[0059]
根据得到的u级建筑矩阵的排列关系与其在矩阵中的位置关系,确立其坐标,对这些坐标进行筛选,终点坐标为道路可通行至建筑物的建筑坐标,即不可跨越单个建筑物坐标至另一个建筑坐标;计算如式(7)所示:
[0060]
d
t
=f
s
(d
u
)
[0061]
d
u
={c
u
(x1,y1),c
u
(x2,y2),c
u
(x3,y3),
……
}
[0062]
d
t
={c
t
(x1,y1),c
t
(x2,y2),c
t
(x3,y3),
……
}
ꢀꢀꢀ
(7)
[0063]
c
t
(x
i
,y
i
)表示终点坐标,d
t
表示筛选后的终点坐标集,c
u
(x
i
,y
i
)表示由u级建筑矩阵的排列关系与其在矩阵中的位置关系确实的坐标,d
u
表示由前面这些坐标组成的坐标集,由公式f
s
对坐标进行筛选;
[0064]
b.确立起点坐标
[0065]
起点为识别内容中的建筑入口e
a
、e
b
...、e
o
,其坐标表示为c
s
(x
i
,y
i
);
[0066]
c.路径规划
[0067]
对每个起点到同一安全等级建筑物确立的所有终点做路径规划,计算结果为由各个坐标集合组成的向量集;计算如式(8)所示:
[0068]
d
r
=f
r
(d
t
,c
s
(x
i
,y
i
))
[0069]
d
r
={d
r1
,d
r2
,
……
,d
ri
}
[0070]
d
ri
={c
ri
(x1,y1),c
ri
(x2,y2),
……
}
ꢀꢀꢀ
(8)
[0071]
d
r
表示由路径规划后各个向量集的集合,d
ri
表示路径规划后的一个向量集,c
ri
(x
i
,y
i
)表示路径规划后每个向量集中的单个坐标,由公式f
r
对终点坐标集与起点坐标进行路径规划计算;
[0072]
d.确立监控安装方案
[0073]
记录所有向量集上单个坐标的次数,筛选记录最多的几个坐标点做聚类计算;计算如式(9)所示:
[0074]
q=p
u
×
(n+3)
[0075]
q=p
u
+o
ꢀꢀꢀ
(9)
[0076]
q表示筛选的坐标点的个数,q表示聚类运算的质心个数,p
u
表示u级建筑物个数,o表示全部起点即建筑入口的个数;
[0077]
y的计算公式遵循原则:随着建筑安全等级的提高,其筛选点个数随之递增;计算如式(10)所示:
[0078]
d
a
=f
j
(c
h
(x1,y1),c
h
(x2,y2),
……
c
h
(x
q
,y
q
))
[0079]
d
a
={c
s
(x1,y1),c
s
(x2,y2),
……
}
ꢀꢀꢀ
(10)
[0080]
d
a
表示监控安装方案中监控摄像位置的坐标点集,c
h
(x
i
,y
i
)表示筛选的前q个点的坐标,c
s
(x
i
,y
i
)表示监控摄像位置的坐标。
[0081]
作为优选,步骤5具体为:
[0082]
u级建筑物监控安装方案中,对得到的监控安装方案进行优化;用粒子群优化算法对方案进行优化,把有监控区域重合的监控摄像头归为一组,用每组的坐标作为粒子群算法的输入,得出优化后的监控摄像位置,同时会减少监控摄像头的个数;计算如式(11)所示:
[0083]
d
li
=f
l
(c
fi
(x1,y1),c
fi
(x2,y2),
……
)
[0084]
d
li
={c
b
(x1,y1),c
b
(x2,y2),
…
}
[0085]
d
l
={d
l1
,d
l2
,
…
}
ꢀꢀꢀ
(11)
[0086]
d
li
表示每组经粒子群优化算法后得出的监控摄像坐标组成的坐标集,c
fi
(x
i
,y
i
)表示分组后每组中监控摄像的坐标,c
b
(x
i
,y
i
)表示每组经粒子群优化算法后得出的监控摄像坐标,d
l
表示所有经分组后经粒子群优化算法得出的监控摄像坐标。
[0087]
本发明通过识别地图信息中建筑物使用属性,进行安全等级分类,并通过地图信息中的各建筑物长度宽度的关系确立栅格单元大小,进而能够绘制栅格图,并用矩阵关系表示各安全等级建筑物与道路的相对位置关系;同时对不同安全等级的建筑物做预测路径规划,后设计视频监控安装方案,最后做监控安装方案的优化。
[0088]
本发明的技术效果在于:
[0089]
本发明采用对建筑物进行安全等级分类的方法,对不同安全等级的建筑物分别做监控安装方案,可根据防范的区域的权重不同做不同的方案,且安全性能有所提升;并且能够对多类类似工厂建筑做监控方案设计,优化监控摄像头的个数与布局,节约时间与成本。
附图说明
[0090]
图1为本发明的流程示意图;
[0091]
图2为具体实施方式中的地图信息图;
[0092]
图3为具体实施方式中的监控安装方案图。
具体实施方式
[0093]
下面结合具体实施例对本发明作进一步说明,但本发明所要保护的范围并不限于此。
[0094]
参照图1,一种基于不同安全等级的地图分析与寻优路径算法结合的工业建筑监控安装方法,包括下述步骤:
[0095]
步骤1:识别获取的地图m
a
,根据识别内容中的建筑物使用属性对建筑物进行安全等级分类,统计不同等级建筑物数量;
[0096]
具体操作为:
[0097]
为将地图m
a
各个建筑的使用属性与所识别到的建筑相对应,已知获得地图m
a
的各个建筑的经纬度,可得知各个建筑的相对位置关系与各建筑在地图上的相对位置关系;通过前后相对位置对应,可确定识别出的各个建筑的使用属性;根据建筑物的使用属性,将其分为n类安全等级,如下所示:
[0098][0099]
g
a
表示建筑物的安全等级;
[0100]
统计数量:对各安全等级建筑物进行计数,如式(1)所示:
[0101]
q
n
=count(g
a
=n)
ꢀꢀꢀ
(1)
[0102]
q
n
表示安全等级为n的建筑物数量,count表示计数;
[0103]
识别获取的地图m
a
,以航拍图为例,基于颜色和形状特征的目标检测与识别方法,可快速对获取地图上的绿化地带、道路地带与建筑物分开,因为此三者在获取的航拍图上颜色和形状呈明显差异。绿化地带基本呈为绿色;而道路则为矩形的形状且颜色为灰色;建筑入口需要人工指出其位置,便于提高监控安装方案的准确度;而剩余的地带则可确定为建筑物,或可直接通过对建筑物颜色与形状特征的规定进行识别。也可通过对建筑物直线特征的检测,用直线特征组成了建筑物的模型,进而有更高精度的识别,可利用opencv等软件实现。
[0104]
而建筑物的使用性质,则在上述步骤完成后,通过原先获取的地图的语义信息进行位置匹配,则可获得这些建筑物的使用属性。
[0105]
识别内容包括:建筑物、绿化与道路的相对位置关系;建筑物长度、宽度(建筑物尺寸信息);建筑物使用属性;道路长度、宽度(道路尺寸信息);绿化地带长度、宽度;建筑入口e
a
、e
b
...e
o
;根据建筑物使用属性对建筑物进行安全等级分类,总共分为五级,其分类依据为:
[0106]
一级:绿化地带;
[0107]
二级:住宅区域,包括生活住宅,工人餐厅,健身房区域;
[0108]
三级:办公区域,包括办公楼;
[0109]
四级:普通工业建筑,包括制造、加工、贮存普通工业材料的工业厂房和库房;
[0110]
五级:高危工业建筑,包括制造、加工、贮存爆炸危险品的工业厂房和库房;
[0111]
按安全等级分类进行各建筑物数量统计:二级建筑物数量为p2,三级建筑物数量为p3,四级建筑物数量为p4,五级建筑物数量为p5。
[0112]
对地图的识别可采用基于深度学习的目标检测算法,如two stage算法或one stage算法,包括了针对faster r-cnn、yolo、ssd等经典算法的升级版本。
[0113]
faster r-cnn网络包括两个步骤:
[0114]
1.使用rpn(region proposal network)提取proposal信息。即先通过输入测试图片到cnn(卷积神经网络),进行特征提取,可以得出不同建筑物的各种使用属性的特征、道路和绿化带的特征等;用rpn先生成一堆anchor box,对其进行裁剪过滤后通过softmax来判断anchors属于前景或者后景,即是物体或不是物体,所以这是一个二分类;同时,另一分支bounding box regression修正anchor box,形成较精确的proposal。这能提高目标检测的准确度和速度。
[0115]
2.使用r-cnn对候选框位置进行预测和物体类别识别。以输入的图像为例,每张图像生成1000~2000个候选区域,将建议窗口映射到cnn的最后一层卷积层feature map上,在通过roi pooling层使每个roi生成固定尺寸的feature map;最后利用softmax loss(探测分类概率)和smooth l1 loss(探测边框回归)对分类概率和边框回归(bounding box regression)联合训练。通过此训练可以在不断调整卷积网络滤镜矩阵参数后检测目标的类型,例如建筑物、道路、绿化等;也可检测建筑物的使用属性等。
[0116]
3.建筑物、道路、绿化地带长度与宽度的关系,可使用opencv技术对其关系进行测量。
[0117]
步骤2:基于步骤1中识别内容中的建筑物、道路、绿化地带的长度与宽度的关系,确立栅格地图中栅格单元的大小;基于步骤1识别内容中的建筑物、绿化与道路的相对位置关系,根据各类建筑的安全等级分类用矩阵表示获取地图ma的栅格图mb;
[0118]
即在确定栅格大小后,根据建筑物、绿化与道路的位置关系与大小,可确认它们在栅格图上的相对位置关系和所占用栅格大小,可将每个栅格用矩阵中的元素表示,若为道路则可表示为0,若为绿化则表示为1,若为二级建筑物则表示为2,以此类推。
[0119]
栅格单元大小的计算公式为:
[0120]
(i)预处理:对获得的数据建筑物长度l
bi
、建筑物宽度w
bi
,绿化带长度l
gi
、绿化带宽度w
gi
,道路长度l
ri
、道路宽度w
ri
进行四舍五入的数据处理,保留小数位为5的数;
[0121]
(ii)计算栅格地图中栅格单元长度如式(2)、(3)所示:
[0122]
l
c
=cf
m
(l
bi
,l
gi
,l
ri
)
ꢀꢀꢀ
(2)
[0123]
若预处理后的数据均为整数,则l
c
表示栅格地图中栅格单元的长度,l
bi
表示建筑物长度,l
gi
表示绿化带长度,l
ri
表示道路长度,cf
m
表示求其最大公因数;
[0124][0125]
若预处理后的数据有小数,则l
c
表示栅格地图中栅格单元的长度,l
bi
表示建筑物长度,l
gi
表示绿化带长度,l
ri
表示道路长度,cf
m
表示求其最大公因数;
[0126]
(iii)计算栅格地图中栅格单元宽度如式(4)、(5)所示:
[0127]
w
c
=cf
m
(w
bi
,w
gi
,w
ri
)
ꢀꢀꢀ
(4)
[0128]
若预处理后的数据均为整数,则w
c
表示栅格地图中栅格单元宽度,w
bi
表示建筑物宽度,w
gi
表示绿化带宽度,w
ri
表示道路宽度,cf
m
表示求其最大公因数;
[0129][0130]
若预处理后的数据有小数,则w
c
表示栅格地图中栅格单元的宽度,w
bi
表示建筑物长度,w
gi
表示绿化带长度,w
ri
表示道路长度,cf
m
表示求其最大公因数;
[0131]
(iv)栅格地图中栅格单元大小计算如式(6)所示:
[0132]
d
a
=l
c
×
w
c
ꢀꢀꢀ
(6)
[0133]
d
a
表示栅格单元的大小,l
c
表示栅格单元的长度,w
c
表示栅格单元的宽度;
[0134]
(v)确定比例尺关系为p;
[0135]
如实际需求的栅格图大小为50cm
×
50cm,实际建筑的大小为1000m
×
1000m,则比例尺关系p=1∶2000。
[0136]
步骤3:建筑与道路关系可如此表示:
[0137]
基于步骤1识别内容中的建筑物、绿化与道路的相对位置关系,对栅格图中的单元进行排序处理,按照矩阵的第某个元素进行排列;
[0138]
栅格单元c
ij
对应于栅格图的第m(i-1)+j单元,其中,1≤i≤m,1≤j≤n;
[0139]
例如c
34
对应于第m(3-1)+4个单元,即2m+4个单元;
[0140]
基于步骤1识别内容中的建筑物、绿化与道路的相对位置关系与确立的栅格单元的大小,矩阵中各元素的数值代表了其为道路或建筑物,在矩阵中表示可清晰明了的表示在栅格图下建筑物与道路之间的位置关系;
[0141]
建筑物与道路关系表示为:
[0142][0143]
z1为表示建筑物与道路关系的矩阵,z
mn
由0或1表示,0表示道路,1表示建筑物;
[0144]
不同安全等级建筑物与道路的关系表示为:
[0145][0146]
z
u
为表示建筑物与道路关系的矩阵,z
mn
由0或u表示,0表示道路,u表示安全等级为u的建筑物;
[0147]
例如在三级建筑矩阵中,z
11
、z
12
、z
22
为三级建筑,则
[0148][0149]
步骤4:基于对特定道路区域进出监控的监控原则与步骤1中划分后不同安全等级的建筑物,确立每一安全等级建筑物的监控安装方案,包括依据不同起点至目标建筑物的路径规划、确立监控摄像安装个数与位置;
[0150]
监控原则为:目标为只监控道路上的进出情况,并实行对监控对象进出中的全面区域监控。如二级安全等级建筑物的监控方案中,应能实现从建筑入口到各个二级建筑物的监控目标,能够对入侵对象的入侵路径进行监控,但只对其路径上的道路进行监控,而非对二级安全等级建筑物的周围全覆盖监控。
[0151]
建筑监控安装方法为:
[0152]
a.确立终点坐标
[0153]
根据得到的u级建筑矩阵的排列关系与其在矩阵中的位置关系,确立其坐标,对这些坐标进行筛选,终点坐标为道路可通行至建筑物的建筑坐标,即不可跨越单个建筑物坐标至另一个建筑坐标;计算如式(7)所示:
[0154]
d
t
=f
s
(d
u
)
[0155]
d
u
={c
u
(x1,y1),c
u
(x2,y2),c
u
(x3,y3),
……
}
[0156]
d
t
={c
t
(x1,y1),c
t
(x2,y2),c
t
(x3,y3),
……
}
ꢀꢀꢀ
(7)
[0157]
c
t
(x
i
,y
i
)表示终点坐标,d
t
表示筛选后的终点坐标集,c
u
(xi,y
i
)表示由u级建筑矩阵的排列关系与其在矩阵中的位置关系确实的坐标,d
u
表示由前面这些坐标组成的坐标集,由公式f
s
对坐标进行筛选;
[0158]
b.确立起点坐标
[0159]
起点为识别内容中的建筑入口e
a
、e
b
...、e
o
,其坐标表示为c
s
(x
i
,y
i
);
[0160]
c.路径规划
[0161]
对每个起点到同一安全等级建筑物确立的所有终点做路径规划,计算结果为由各个坐标集合组成的向量集;计算如式(8)所示:
[0162]
d
r
=f
r
(d
t
,c
s
(x
i
,y
i
))
[0163]
d
r
={d
r1
,d
r2
,
……
,d
ri
}
[0164]
d
ri
={c
ri
(x1,y1),c
ri
(x2,y2),
……
}
ꢀꢀꢀ
(8)
[0165]
d
r
表示由路径规划后各个向量集的集合,d
ri
表示路径规划后的一个向量集,c
ri
(x
i
,y
i
)表示路径规划后每个向量集中的单个坐标,由公式f
r
对终点坐标集与起点坐标进行路径规划计算;
[0166]
d.确立监控安装方案
[0167]
记录所有向量集上单个坐标的次数,筛选记录最多的几个坐标点做聚类计算;计算如式(9)所示:
[0168]
q=p
u
×
(n+3)
[0169]
q=p
u
+o
ꢀꢀꢀ
(9)
[0170]
q表示筛选的坐标点的个数,q表示聚类运算的质心个数,p
u
表示u级建筑物个数,o表示全部起点即建筑入口的个数;
[0171]
y的计算公式遵循原则:随着建筑安全等级的提高,其筛选点个数随之递增;计算如式(10)所示:
[0172]
d
a
=f
j
(c
h
(x1,y1),c
h
(x2,y2),
……
c
h
(x
q
,y
q
))
[0173]
d
a
={c
s
(x1,y1),c
s
(x2,y2),
……
}
ꢀꢀꢀ
(10)
[0174]
d
a
表示监控安装方案中监控摄像位置的坐标点集,c
h
(x
i
,y
i
)表示筛选的前q个点的坐标,c
s
(x
i
,y
i
)表示监控摄像位置的坐标。
[0175]
步骤4:基于步骤3中确立的每一安全等级建筑物的监控安装方案,根据安全等级不同做方案优化,包括监控摄像头的个数、安装位置;具体为:
[0176]
u级建筑物监控安装方案中,对得到的监控安装方案进行优化;用粒子群优化算法对方案进行优化,把有监控区域重合的监控摄像头归为一组,用每组的坐标作为粒子群算法的输入,得出优化后的监控摄像位置,同时会减少监控摄像头的个数;计算如式(11)所
示:
[0177]
d
li
=f
l
(c
fi
(x1,y1),c
fi
(x2,y2),
……
)
[0178]
d
li
={c
b
(x1,y1),c
b
(x2,y2),
…
}
[0179]
d
l
={d
l1
,d
l2
,
…
}
ꢀꢀꢀ
(11)
[0180]
d
li
表示每组经粒子群优化算法后得出的监控摄像坐标组成的坐标集,c
fi
(x
i
,y
i
)表示分组后每组中监控摄像的坐标,c
b
(x
i
,y
i
)表示每组经粒子群优化算法后得出的监控摄像坐标,d
l
表示所有经分组后经粒子群优化算法得出的监控摄像坐标。
[0181]
本发明通过识别地图信息中建筑物使用属性,进行安全等级分类,并通过地图信息中的各建筑物长度宽度的关系确立栅格单元大小,进而能够绘制栅格图,并用矩阵关系表示各安全等级建筑物与道路的相对位置关系;同时对不同安全等级的建筑物做预测路径规划,后设计视频监控安装方案,最后做监控安装方案的优化。本发明可根据防范的区域的权重不同做不同的方案,且安全性能有所提升;并且能够对多类类似工厂建筑做监控方案设计,优化监控摄像头的个数与布局,节约时间与成本。
[0182]
具体到如图2所示的地图信息时,识别信息:
[0183]
根据建筑使用属性,图2中建筑可分为:一级绿化建筑,二级住宅区域(食堂、员工宿舍),三级办公区域(办公楼),四级普通工业建筑(普通工业材料生产区、库房);
[0184]
对上述建筑的长度、宽度与道路的长度、宽度进行识别。
[0185]
分别计算上述长度与宽度的最大公因数,确立栅格单元大小为:2m*2m;
[0186]
根据建筑物与道路相对位置关系与安全等级分类后的建筑物,用矩阵表示其相对关系。
[0187]
计算各安全等级建筑物的预测路径,确立监控安装方案,并做优化,最终布局如图3所示(默认摄像头朝着入口方向,摄像头监控角度为60
°
,监控拍摄范围为20m)。
[0188]
应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1