一种基于局部匹配度的高效轨迹融合方法与流程
[0001]
该发明创造属于计算机技术领域,尤其涉及一种基于局部匹配度的高效轨迹融合方法。
背景技术:
[0002]
随着电子信息技术的发展,获取移动实体轨迹的方法逐渐丰富,如雷达信号、激光定位设备、ais(信息系统领域学术专业组织,船舶定位技术)、ads-b(广播式自动相关监视,民航定位技术)等,每一种方法在一定时间空间范围内都能够独立获得移动实体的轨迹。
[0003]
但是,对于综合信息系统来说,如果接入了相同时空范围内不同来源的轨迹数据,就会出现数据重复问题;此外不同来源的轨迹数据特点各异,不同来源的数据定位精度、属性完整度都不相同。为了将重复的轨迹进行合并,实现移动实体轨迹数据唯一、完整、准确,需要对实时接入的多路轨迹数据进行融合处理。
[0004]
轨迹融合处理的基础是轨迹相似度计算,通过比对不同来源数据的轨迹相似度,找到相似度足够高的轨迹组,将这些轨迹判定为同一个移动实体的轨迹,进一步进行属性补全和定位精度的选优。在实际系统中,不同来源的轨迹数据以数据流形式不断进入融合处理程序,融合处理程序需要缓存一段时间的数据,然后定时进行所有不同编号和来源数据的相似度计算。
[0005]
假设融合处理程序进行相似度计算的时间开销是c,缓存的原始移动实体数量是n,那么一次处理过程需要的时间开销就是n
×
(n-1)
×
c/2,由此可知随着数据流量的增加,每一次融合处理过程的时间开销大幅上升,可能会造成系统崩溃。
技术实现要素:
[0006]
为解决上述技术问题,本发明提供一种基于局部匹配度的高效轨迹融合方法,本方法通过移动实体轨迹数据预先分组大幅度减少轨迹相似度计算的次数,从而提高融合处理的效率。
[0007]
本发明提供的一种基于局部匹配度的高效轨迹融合方法,其包括以下步骤:
[0008]
步骤1,初始参数设定,包括轨迹数据缓存寿命和匹配成功条件判定参数;轨迹数据缓存寿命t
life
定义为:实时轨迹数据类栅格化处理后每一个栅格区域中轨迹数据的生存时间;匹配成功条件判定参数包括:匹配半径r
e
、匹配个数m
c
和匹配比率m
p
,其中,匹配半径r
e
:对不同的轨迹数据序列作匹配度计算时,同一时刻两点之间的位置误差上限;匹配个数m
c
及匹配比率m
p
:对两个不同的实体编号对应的轨迹数据序列作匹配度计算,当匹配个数不小于m
c
,且匹配比率不小于m
p
时,匹配成功,否则匹配失败。
[0009]
步骤2,轨迹数据类栅格化缓存处理,将实时缓存的轨迹数据划入不同类栅格区域,完成缓存数据的分组过程;
[0010]
步骤3,对任意一分组的缓存数据进行寿命检测,并根据步骤1设定的轨迹数据缓存寿命实时清除缓存的无效数据;
[0011]
步骤4,轨迹数据序列匹配度计算;
[0012]
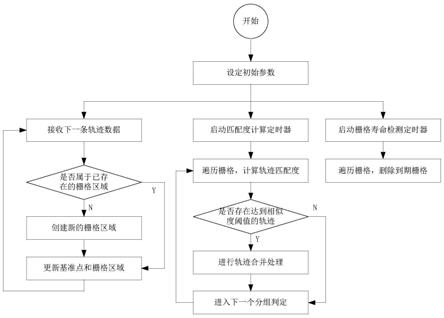
步骤5,根据步骤4的计算结果与步骤1设定的匹配成功条件判定参数进行匹配,匹配成功,将匹配成功的移动实体轨迹进行合并处理,融合成为同一个移动实体;匹配失败,返回步骤3进行下一个分组的判定过程,直到遍历所有缓存数据。
[0013]
进一步的,所述步骤2中轨迹数据类栅格化缓存处理基于最近邻法实现,具体流程如下:
[0014]
步骤
①
:给定t
i
时刻轨迹点t
i
=(x
i
,y
i
,z
i
),其中x
i
,y
i
,z
i
分别为轨迹点的经度、纬度和高度;以t
i
为基准,确定栅格区域r={p(t)|p(t)≤t
i
+v
max
|t-t
i
|},式中p(t)为t时刻任意轨迹点,v
max
为预先设定运动实体最大速度;
[0015]
步骤
②
:给定t
j
时刻轨迹点t
j
=(x
j
,y
j
,z
j
),若轨迹点t
j
位于栅格区域r,执行步骤
③
,否则创建新区域r
*
={p(t)|p(t)≤t
j
+v
max
|t-t
j
|},继续执行步骤
②
;
[0016]
步骤
③
:更新基准点及栅格区域;
[0017]
若t
i
≤t
j
,基准点更新为t
j
,栅格区域更新为r=r
*
={p(t)|p(t)≤t
j
+v
max
|t-t
j
|},否则栅格区域r保持不变;
[0018]
步骤
④
:如此往复,更新基准点及栅格区域,同时将实时轨迹数据划入不同类栅格区域。
[0019]
进一步的,所述步骤3中实时检测第i(i=1,2,3,
…
)个类栅格区域轨迹数据的生存时间t
i
,当t
i
>t
life
时,清除第i个类栅格区域内所有轨迹数据,否则保留第i个类栅格区域内所有轨迹数据,其中,t
life
为轨迹数据缓存寿命。
[0020]
进一步的,所述步骤4中基于插值算法实现轨迹数据序列的匹配度计算,且计算步骤如下:
[0021]
步骤
①
:对同一类栅格区域内的轨迹数据序列根据点列个数从多到少进行排序,记为s
i
(i=1,2,3,
…
);
[0022]
步骤
②
:以点列个数较多的轨迹数据序列为基准,对轨迹数据序列s
i
及s
j
(i=1,2,3,
…
,j=1,2,3,
…
,i≠j)进行匹配度计算;
[0023]
步骤
③
:基于插值算法计算数据序列s
i
与数据序列s
j
之间的匹配度,即计算相同时刻s
i
数据序列轨迹点与s
j
数据序列轨迹点之间的距离差,当距离差小于匹配半径r
e
时,匹配个数m
j
加1。
[0024]
进一步的,所述步骤5中当匹配个数m
j
大于等于给定阈值m
c
,且匹配个数m
j
与s
j
数据序列个数的比值大于给定匹配比率m
p
时,匹配成功,此时将匹配成功的移动实体轨迹进行合并处理,变成同一个移动实体;否则匹配失败,进行下一个分组的判定过程。
[0025]
有益效果:
[0026]
本方法通过移动实体轨迹数据预先分组大幅度减少轨迹相似度计算的次数,从而提高融合处理的效率。特别适用于轨迹数据来源多样,数据流量大,轨迹分布地理范围广的场景。
[0027]
具体的:判断分组的时间开销小于轨迹相似度计算,通过预先分组减少轨迹相似度计算的次数,大幅度降低时间开销,从而提高轨迹融合处理的效率。假设融合处理程序进行相似度计算的时间开销是c,通过预处理方式将n个实体分成了p组,其中组内实体数量大于1的分组个数为p2,组内实体数量最大为q,那么一次处理过程需要的最大时间开销就是q
×
(q-1)
×
p2
×
c/2。由计算公式可以推导出本方法的时间开销远小于传统方法。
附图说明
[0028]
图1地理网格到二维数组的映射;
[0029]
图2飞机轨迹融合试验系统截图;
[0030]
图3船舶轨迹融合试验系统截图。
具体实施方式
[0031]
本发明的主要思路是将缓存的轨迹数据按照时空关联属性进行分组,具备融合条件的移动实体放到相同的组内;然后通过异步线程定时在包含多个移动实体的组内进行轨迹相似度计算。
[0032]
整个过程的流程图如图1所示,本发明的基于局部匹配度的高效轨迹融合方法包括以下步骤:
[0033]
1.初始参数设定
[0034]
根据不同来报单位实时轨迹数据置信度的不同设定相应的初始参数。主要包括轨迹数据缓存寿命t
life
和匹配成功条件判定参数,即匹配半径r
e
、匹配个数m
c
和匹配比率m
p
。
[0035]
轨迹数据缓存寿命t
life
:实时轨迹数据类栅格化处理后每一个栅格区域中轨迹数据的生存时间。取值范围一般为[1,30](单位分钟),时间越长轨迹相似度计算越准确,但时间开销也越大,需要根据数据量和硬件性能进行调整。
[0036]
匹配半径r
e
:对不同的轨迹数据序列作匹配度计算时,同一时刻两点之间的位置误差上限。取值范围一般为[1,1000](单位米),需要根据数据源的定位精度进行调整。
[0037]
匹配个数m
c
及匹配比率m
p
:对两个不同的实体编号对应的轨迹数据序列作匹配度计算,当匹配个数不小于m
c
,且匹配比率不小于m
p
时,匹配成功,否则匹配失败。m
c
的取值范围为[1,1000],可以根据需要融合判定的严格程度进行调整,数值越大融合判定越严格;m
p
的取值范围为[0.8,0.99]。
[0038]
2.轨迹数据类栅格化缓存处理
[0039]
轨迹数据类栅格化缓存处理基于最近邻法实现,具体流程如下:
[0040]
步骤
①
:给定t
i
时刻轨迹点t
i
=(x
i
,y
i
,z
i
),其中x
i
,y
i
,z
i
分别为轨迹点的经度、纬度和高度;以t
i
为基准,确定栅格区域r={p(t)|p(t)≤t
i
+v
max
|t-t
i
|},式中p(t)为t时刻任意轨迹点,v
max
为预先设定运动实体最大速度,若运动实体为飞机,则|v
max
|=5*340m/s,若运动实体为船舶,则|v
max
|=150*1852/3600m/s;如果运动实体为车辆,则|v
max
|=350000/3600m/s
[0041]
步骤
②
:给定t
j
时刻轨迹点t
j
=(x
j
,y
j
,z
j
),若轨迹点t
j
位于栅格区域r,执行步骤
③
,否则创建新区域r
*
={p(t)|p(t)≤t
j
+v
max
|t-t
j
|},继续执行步骤
②
;
[0042]
步骤
③
:更新基准点及栅格区域。若t
i
≤t
j
,基准点更新为t
j
,栅格区域更新为r=r
*
={p(t)|p(t)≤t
j
+v
max
|t-t
j
|},否则栅格区域r保持不变;
[0043]
步骤
④
:如此往复,更新基准点及栅格区域,同时将实时轨迹数据划入不同类栅格区域。
[0044]
本步骤是对缓存数据进行分组的过程,这也是提高融合效率的关键步骤。
[0045]
3.缓存数据寿命检测
[0046]
实时检测第i(i=1,2,3,
…
)个类栅格区域轨迹数据的生存时间t
i
,当t
i
>t
life
时,清除第i个类栅格区域内所有轨迹数据,否则保留第i个类栅格区域内所有轨迹数据。
[0047]
4.轨迹数据序列匹配度计算
[0048]
基于插值算法实现轨迹数据序列的匹配度计算。计算步骤如下:
[0049]
步骤
①
:对同一类栅格区域内的轨迹数据序列根据点列个数从多到少进行排序,记为s
i
(i=1,2,3,
…
);
[0050]
步骤
②
:以点列个数较多的轨迹数据序列为基准,对轨迹数据序列s
i
及s
j
(i=1,2,3,
…
,j=1,2,3,
…
,i≠j)进行匹配度计算;
[0051]
步骤
③
:基于插值算法计算数据序列s
i
(基准数据序列)与数据序列s
j
之间的匹配度。即计算相同时刻s
i
数据序列轨迹点与s
j
数据序列轨迹点之间的距离差,当距离差小于匹配半径r
e
时,匹配个数m
j
加1。
[0052]
5.匹配成功条件判定
[0053]
当匹配个数m
j
大于等于给定阈值m
c
,且匹配个数m
j
与s
j
数据序列个数的比值大于给定匹配比率m
p
时,匹配成功,此时将匹配成功的移动实体轨迹进行合并处理,变成同一个移动实体;否则匹配失败,进行下一个分组的判定过程。
[0054]
通过仿真试验验证,本发明的方法可以在每分钟10万轨迹点的数据流量下稳定运行,仿真试验系统截图如图2和图3所示,图2是成功实现融合的飞机轨迹,图3是成功实现融合的船舶轨迹。
[0055]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1