基于多视图对抗自编码器的机械设备健康状态识别方法
1.本发明属于机械装备故障诊断技术领域,具体涉及一种考虑信号中故障频率特征的基于多视图对抗自编码器的机械设备健康状态识别方法。
背景技术:
2.随着物联网技术及数字孪生技术的发展,机械装备故障诊断的智能化终端产品在社会生产和生活中应用越来越广泛。其健康状态诊断能力的好坏不仅关系到企业的经济效益,更关系到小到机床设备,大到核电站等大型设备的安全。而轴承作为其中的核心元件,具有举足轻重的作用。研究表明,机械设备40%
‑
50%的故障由轴承产生。因此,基于轴承,在没有大量数据标签、信噪比较低的轴承早期故障阶段及时的诊断出故障,具有重要的意义。
3.在现有的众多诊断方法中,大量数据无标签及数据信噪比低是影响其实用性的关键因素,基于此,传统的方法主要包括无监督学习方法和迁移学习方法。无监督学习可以在不借助数据标签的前提下,通过研究数据本身中的统计规律实现对数据的分类。但是这种学习方式无法定性的学习到轴承中的故障特性,从而实现较好的泛化和精确的故障诊断。此外,在噪声混叠较为严重时,冲击信号被淹没在信号中,想要完整提取故障冲击成分是一件困难的事情。迁移学习通过在源域中学习数据的分布,再通过网络训练,使目标域数据与源域数据的特征分布逼近。相比于无监督学习,其可以通过源域数据的特点,为目标域中的特征提取提供一定的指导性。但是迁移学习方法对源域和目标域的数据相似度要求较高,噪声、工况、故障频率、振动传递路径的变化都有可能造成方法的失效。
4.对抗自编码,作为一种前沿的机器学习方法已经在诸多领域有了较好的应用。也有学者将其引入了轴承的故障诊断领域。然而,其并没有考虑以下问题:1)早期信号往往信噪比较高,对网络特征提取能力要求较高;2)基于少量的带标签的数据的单个半监督学习模型,其预测结果的准确率可信度有限。
技术实现要素:
5.为了克服上述现有技术的缺点,本发明的目的在于提供一种考虑信号中故障频率特征的基于多视图对抗自编码器的机械设备健康状态识别方法,通过半监督学习方式,解决了机械设备进行诊断而数据标签缺少的问题;通过多视图学习和集成学习的引入,解决了标签缺乏且信号信噪比低时,网络特征提取能力不足、及结果是否可信的问题,提高了网络在实际工程中的适用性。
6.为达到上述目的,本发明采取的技术方案为:
7.基于多视图对抗自编码器的机械设备健康状态识别方法,包括以下步骤:
8.步骤1:获取机械设备的n1个带标签的数据集{(x
i
,d
i
)|i=0,1,...,n1},和n2个不带标签的数据集{x
j
|j=0,1,...,n2};
9.步骤2:使用频谱fs、包络谱es和连续小波变换cwt三种方法分别对步骤一的数据
集进行分析,其中连续小波变换cwt获得两种不同分辨率的时频图像,因此三种分析方法可以提取到数据中的四种不同特征,且特征间存在互补性,之后,对数据集进行归一化处理,数据集可以表示为x=[fs,es,cwt
‑
1,cwt
‑
2];
[0010]
步骤3:在对抗自编码器的基础上构建多视图对抗自编码器c,分别在对抗自编码器的编码器部分en和解码器部分de,将其拓展成多个具有相同拓扑结构的网络,并在中间的特征提取层进行融合,所构造的网络能同时提取到步骤2中的多个视图数据x=[fs,es,cwt
‑
1,cwt
‑
2]中的特征,并能融合互补的特征,去除冗余的特征;
[0011]
步骤4:在步骤3所构造的网络的输入部分使用步骤2中的多个视图数据x=[fs,es,cwt
‑
1,cwt
‑
2];在网络的数据分布假设部分,使用不同的假设分布n
d
来训练网络,获得多个训练好的多视图对抗自编码器{c1,c2,
…
,c
n
};
[0012]
步骤5:通过集成学习的方法将步骤4中训练好的网络的编码器部分en联合起来,构建了集成多视图对抗自编码器enc,其则样本x属于某个类别l
k
的总概率p(y=l
k
|x=x)为各个网络c
i
的概率的和,即:
[0013]
步骤6:使用步骤5中所训练的集成多视图对抗自编码器enc对机械设备进行故障诊断。
[0014]
所述的步骤1中,无标签数据的个数可远大于有标签数据的个数,即n2>n1。
[0015]
所述的步骤2中,连续小波变换以morlet小波为基函数。
[0016]
所述的步骤3中,信号的编码器en与解码器de通过并行结构实现对多视图数据的学习,并行的数量即为视图的数量,辨识器d不存在并行的结构,其用于辨识分布的真假,并强迫编码器en将学习到的特征与所假设的分布一致,自编码部分以均方误差作为损失函数。
[0017]
所述的步骤4中,所假设的分布包括高斯分布、混合高斯分布、瑞士卷分布、均匀分布,这四种假设分布使多视图网络生成不同的特征分布,提高最终预测的置信度。
[0018]
本发明的有益效果为:针对工程实际中所存在的问题,本发明通过对抗自编码器实现了模型对大量无标签数据的学习,通过结合不同的信号处理方法构造了多视图对抗自编码器,实现了低信噪比信号中故障频率相关特征的提取,通过集成学习提高了结果的可信度。所提出的模型在实际工程中具有较强的适用性,不仅适用于基于机械设备终端硬件的故障诊断,同时也可以拓展到其它机械设备,包括基于大型离线系统的机械设备的故障诊断。
附图说明
[0019]
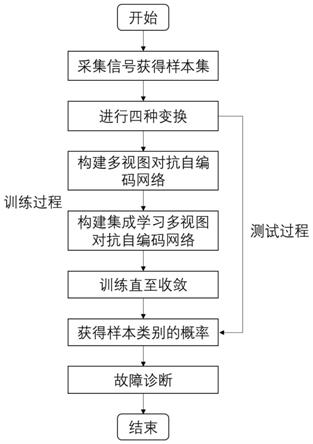
图1为本发明的流程图。
[0020]
图2为多视图对抗自编码器c的网络结构图。
[0021]
图3是本发明方法在实施例一中数据集a上的诊断结果,及其与不同输入、不同假设分布的对抗自编码器的诊断结果的对比。
[0022]
图4是本发明方法在实施例一中数据集b上的诊断结果,及其与不同输入、不同假设分布的对抗自编码器的诊断结果的对比。
[0023]
图5是本发明方法在实施例一中数据集c上的诊断结果,及其与不同输入、不同假
设分布的对抗自编码器的诊断结果的对比。
[0024]
图6是发明方法在实施例一中数据集d上的诊断结果,及其与不同输入、不同假设分布的对抗自编码器的诊断结果的对比。
[0025]
图7是本发明方法在实施例一中数据集e上的诊断结果,及其与不同输入、不同假设分布的对抗自编码器的诊断结果的对比。
具体实施方式
[0026]
下面结合附图对本发明进一步详细描述。
[0027]
如图1所示,一种考虑信号中故障频率特征的基于多视图对抗自编码器的机械设备健康状态识别方法,包括以下步骤:
[0028]
步骤1:获取机械设备的n1个带标签的数据集{(x
i
,d
i
)|i=0,1,...,n1},和n2个不带标签的数据集{x
j
|j=0,1,...,n2}。无标签数据的个数可远大于有标签数据的个数,即n2>n1。无标签数据量越多,网络越能更好的学习到数据中的统计规律。
[0029]
步骤2:使用频谱fs(傅里叶变换)、包络谱es(希尔伯特变换+傅里叶变换)、连续小波变换cwt对数据集进行分析。其中连续小波变换(cwt)获得两种不同分辨率的时频图像。不同的分析方法可以提取到数据中的不同特征,且特征间存在互补性。之后,对数据集进行归一化处理,数据集可以表示为x=[fs,es,cwt
‑
1,cwt
‑
2]。进行变换后的数据是信号频率分析后的结果,可以使信号中的故障冲击特征得到增强,更适于低信噪比环境下的诊断。连续小波变换以morlet小波为基函数。morlet小波不仅可以保证较好的时频分辨率,而且也具有相对较快的计算速度。
[0030]
步骤3:在对抗自编码器的基础上构建多视图对抗自编码器c。分别在对抗自编码器的编码器部分en和解码器部分de,将其拓展成多个具有相同拓扑结构的网络,并在中间的特征提取层进行融合,参照图2。所构造的网络能同时提取到步骤2中的多个视图数据x=[fs,es,cwt
‑
1,cwt
‑
2]中的特征,并一定程度上融合互补的特征,去除冗余的特征。构建多视图对抗自编码器c,信号的编码器部分en,可以输入多维数据来提取信号特征f;信号的解码器部分de与编码器部分en结构相对应,将特征f再还原为输入x形式;信号的辨识器d用来判断所学习到的特征是否和假设的特征一致。自编码部分以均方误差作为损失函数。
[0031]
步骤4:在步骤3所构造的网络的输入部分使用步骤2中的多个视图数据x=[fs,es,cwt
‑
1,cwt
‑
2];在网络的数据分布假设部分,使用不同的假设分布n
d
来训练网络,获得多个训练好的多视图对抗自编码器{c1,c2,
…
,c
n
}。所假设的分布包括高斯分布、混合高斯分布、瑞士卷分布、均匀分布。四种假设分布使多视图网络生成不同的特征分布,提高最终预测的置信度。
[0032]
步骤5:通过集成学习的方法将步骤4中训练好的网络的编码器部分en联合起来,构建了集成多视图对抗自编码器enc,其则样本x属于某个类别l
k
的总概率p(y=l
k
|x=x)为各个网络c
i
的概率的和,即:通过集成学习,样本预测的置信度得到提高。
[0033]
步骤6:使用步骤4中所训练的集成多视图对抗自编码器enc对机械设备进行故障诊断。
[0034]
实施例一
[0035]
以某轴承的健康状态智能识别为例,验证本发明的可行性。
[0036]
步骤1:利用某滚动轴承实验数据进行分析,实验中采用的轴承规格为6309和7308b,采样频率为32k/s,故障通过加速寿命试验产生。在本发明中,总共构造了5个数据集,详细信息如表1所示。每个数据集包含4个不同故障类型的轴承健康状况,每个样本包含1000个数据点。72个有标签样本和6048个无标签样本同时用于训练,其中6048个无标签也被用于测试集,测试方法的有效性。
[0037]
表1滚动轴承数据样本
[0038][0039][0040]
步骤2:使用频谱fs(傅里叶变换)、包络谱es(希尔伯特变换+傅里叶变换)、连续小波变换cwt对信号进行不同角度的分析,从不同的方面初步提取信号中特征。其中连续小波变换(cwt)获得两种不同分辨率的时频图像。之后,对数据进行归一化处理,数据集可以表示为x=[fs,es,cwt
‑
1,cwt
‑
2]。连续小波变换以morlet小波为基函数。
[0041]
步骤3:构建多视图对抗自编码器c,信号的编码器部分en为并行排列的多视图网络,可以输入多维数据来提取信号特征f;信号的解码器部分de与编码器部分en对应,将特征f再还原为输入x形式;辨识器d比较真实特征分布与假设特征分布间的差异。三个部分分别由两层组成,每层中包含1000个神经元。并设置特征层的维数为2,输出层的维度为4。自编码部分以均方误差作为损失函数。
[0042]
步骤4:在步骤3所构造的网络的输入部分使用步骤2中的多个视图数据x=[fs,es,cwt
‑
1,cwt
‑
2];在网络的数据分布假设部分,使用高斯分布、混合高斯分布、瑞士卷分布、均匀分布来训练网络。获得多个训练好的多视图对抗自编码器{c1,c2,c3,c4}。
[0043]
步骤5:构建集成多视图对抗自编码器enc,其通过集成学习的方法将多个多视图自编码器c结合起来,可表示为enc={c
(i)
|i=1,2,...,m}。多个学习器分别由不同的假设分布n
d
训练得到,其样本属于某个类别c
k
的概率为通过集成学习,样本预测的置信度得到提高。所假设的分布包括高斯分布、混合高斯分布、瑞士卷分布、均匀分布。使用rmsprop算法训练网络,最大迭代次数设为1000。
[0044]
步骤6:使用步骤5中所训练的集成多视图对抗自编码器enc对机械设备进行故障诊断。
[0045]
通过本发明对所构造的不同数据集进行训练并测试,其平均测试精度也能达到100%,即使对于较难辨识的微弱故障,模型也可将其准确分类。
[0046]
效果对比:
[0047]
选择基于aae及不同假设分布的方法进行对比,基于表格1中的5个数据集的准确率如图3
‑
7所示。可以看出,本发明方法拥有最高的测试准确率。对比结果也证明了单个视图及单个分布对数据中特征的学习具有局限性,其不能较好的划分故障类型。尤其是时域信号,由于噪声的淹没,其在各数据集中只有50%左右的测试准确率,难以实现对机械设备的健康状态进行判断。频谱的平均准确率最高,但是也不是所有的数据集中频谱都能表现良好,如图4所示的高斯分布和图6所示的高斯混合分布,相比于频谱数据,低分辨率的cwt具有更高的识别准确率。这也证明了多视图融合学习的必要性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1