基于数据学习的智能环保转运方法与流程
1.本发明属于转运设备技术领域,具体涉及一种基于数据学习的智能环保转运方法,主要应用于监控转运料斗实际运行状态。
背景技术:
2.目前,在料场、电厂、廊道输送工程中,常规的转运站配备转运料斗常因散料黏连、积压而造成料斗堵料,进而导致散料输送能力不足,引发停机维护,造成生产停滞。配备振动电机能有效消除积料、堵料问题,但是散料堵塞、堆积的阶段和程度不同,激振强度和有效作用时间不同,长期工作振动电机的使用寿命不能保证并引发额外的故障损耗。
技术实现要素:
3.本发明旨在提供一种基于数据学习的智能环保转运方法,该方法检测精度可靠,配合使用的料斗运行稳定、功能强大、使用寿命长。
4.本发明公开了一种基于数据学习的智能环保转运方法,步骤如下:
5.步骤a)检测料流通过数据,后台中央集控器将得到的数据和设定模型对比,得输送量与积料程度;
6.步骤b)结合步骤a所得数据,对异常数据进行计算并作出作用强度-作用时间的非线性关系曲线的plc程序指令;
7.步骤c)按照步骤b所得plc程序指令,执行振动除积料作业,并实时更新料流通过数据,后台中央集控器进一步优化执行解决方案;
8.步骤d)当料流通过数据恢复正常后,中央集控器发出振动电机停机信号并保持待机。
9.优选地,步骤a)具体为:借助流速传感器和压力传感器检测料流通过数据,将料流形态、通过流速、积压重量分布数据传递至后台中央集控器与设定料斗运行状态计算模型运行结果进行比对,判断输送量与积料程度。
10.优选地,步骤b)具体为:若判断输送量与积料程度异常,结合检测的料流形态、通过流速、积压重量分布数据,基于计算模型通过算法求解得出积料解决方案并模拟换算得出实现预期效果的振动电机振动作业指令程序。
11.优选地,步骤c)具体为:振动电机接收到plc控制指令后执行振动除积料作业,流速传感器和压力传感器检测数据因积料缓解而发生实时变化并更新传递于中央集控器数据库作记录分析,中央集控器基于计算模型将理论激振指令参数、预期执行效同实时传递检测数据进行比对,进一步修正计算模型和算法参数,不断迭代计算、学习优化执行解决方案。
12.优选地,步骤d)具体为:流速、压力测定数据恢复到正常参数范围值区间后,中央集控器依据检测数据释放振动电机停机信号,流速、压力传感器原件持续状态巡检,中央集控器保持执行待机。
13.本发明还公开了一种采用上述基于数据学习的智能环保转运方法的环保转运料斗,包括料斗钢结构体、振动电机和连接于所述转运料斗本体的plc系统,所述环保转运料斗位于转运站,所述plc系统用于控制卸料斗本体上附着的振动电机的工作状态。
14.特别地,还包括现场值守系统,所述现场值守系统和plc系统均连接于服务器平台,所述服务器平台连接于后台操作系统。实现堵料巡检与解决的无人值守。
15.本发明的有益效果:
16.1、本发明使用现场值守系统对转运料斗的现场工作情况进行现场值守,将压力传感器和流速检测仪的数据通过服务器平台将值守情况发送给后台操作系统,使后台操作系统的分析模块就现场工作数据进行分析,通过预先结构输送模型的计算结果数据匹配振动电机最优工作指令程序,控制振动电机依据散料流速、料斗内散料的积存重量信息数据进而能够智能控制振动电机作调控业,实时调控工作强度与启停。实现积料解决的智能分析与方案决策。
17.2、根据振动执行后的流速、激振强度、压力信号等执行历史数自动修正和校正调振动强度、启停介入时间,该plc控制系统具有智能学习能力。基于历史数据实现解决方案的适应与优化。
附图说明
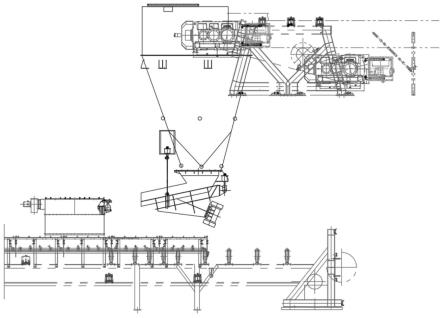
18.图1是本发明实施例提供的环保转运场景模拟图;
19.图2是本发明实施例提供的环保转运料斗结构示意图;
20.图3是本发明实施例提供的环保转运方法的工作原理图;
21.图4是本发明实施例提供的环保转运方法的工艺流程图。
具体实施方式
22.下文将结合具体实施例对本发明的技术方案做更进一步的详细说明。应当理解,下列实施例仅为示例性地说明和解释本发明,而不应被解释为对本发明保护范围的限制。凡基于本发明上述内容所实现的技术均涵盖在本发明旨在保护的范围内。
23.除非另有说明,以下实施例中使用的原料和试剂均为市售商品,或者可以通过已知方法制备。
24.如图1所示的基于数据学习的智能环保转运方法,步骤如下:
25.步骤a)借助流速传感器和压力传感器检测料流通过数据,将料流形态、通过流速、积压重量分布数据传递至后台中央集控器与设定料斗运行状态计算模型运行结果进行比对,判断输送量与积料程度;
26.步骤b)若判断输送量与积料程度异常,结合检测的料流形态、通过流速、积压重量分布数据,基于计算模型通过算法求解得出积料解决方案并模拟换算得出实现预期效果的振动电机振动作业指令程序(实现作用强度-作用时间的非线性关系曲线的plc程序指令);
27.步骤c)振动电机接收到plc控制指令后执行振动除积料作业,流速传感器和压力传感器检测数据因积料缓解而发生实时变化并更新传递于中央集控器数据库作记录分析,中央集控器基于计算模型将理论激振指令参数、预期执行效同实时传递检测数据进行比对,进一步修正计算模型和算法参数,不断迭代计算、学习优化执行解决方案;
28.步骤d)流速、压力测定数据恢复到正常参数范围值区间后,中央集控器依据检测数据释放振动电机停机信号,流速、压力传感器原件持续状态巡检,中央集控器保持执行待机。
29.一种采用上述基于数据学习的智能环保转运方法的环保转运料斗,包括料斗钢结构、振动电机和连接于所述转运料斗本体的plc系统,所述环保转运料斗位于转运站,所述plc系统用于控制卸料斗本体上附着的振动电机的工作状态。特别地,还包括现场值守系统,所述现场值守系统和plc系统均连接于服务器平台,所述服务器平台连接于后台操作系统。实现堵料巡检与解决的无人值守。
30.以上,对本发明的实施方式进行了说明。但是,本发明不限定于上述实施方式。凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.基于数据学习的智能环保转运方法,其特征在于,包括如下步骤:步骤a)检测料流通过数据,后台中央集控器将得到的数据和设定模型对比,得输送量与积料程度;步骤b)结合步骤a所得数据,对异常数据进行计算并作出作用强度-作用时间的非线性关系曲线的plc程序指令;步骤c)按照步骤b所得plc程序指令,执行振动除积料作业,并实时更新料流通过数据,后台中央集控器进一步优化执行解决方案;步骤d)当料流通过数据恢复正常后,中央集控器发出振动电机停机信号并保持待机。2.根据权利要求1所述的基于数据学习的智能环保转运方法,其特征在于,步骤a)具体为:借助流速传感器和压力传感器检测料流通过数据,将料流形态、通过流速、积压重量分布数据传递至后台中央集控器与设定料斗运行状态计算模型运行结果进行比对,判断输送量与积料程度。3.根据权利要求1所述的基于数据学习的智能环保转运方法,其特征在于,步骤b)具体为:若判断输送量与积料程度异常,结合检测的料流形态、通过流速、积压重量分布数据,基于计算模型通过算法求解得出积料解决方案并模拟换算得出实现预期效果的振动电机振动作业指令程序。4.根据权利要求1所述的基于数据学习的智能环保转运方法,其特征在于,步骤c)具体为:振动电机接收到plc控制指令后执行振动除积料作业,流速传感器和压力传感器检测数据因积料缓解而发生实时变化并更新传递于中央集控器数据库作记录分析,中央集控器基于计算模型将理论激振指令参数、预期执行效同实时传递检测数据进行比对,进一步修正计算模型和算法参数,不断迭代计算、学习优化执行解决方案。5.根据权利要求1所述的基于数据学习的智能环保转运方法,其特征在于,步骤d)具体为:流速、压力测定数据恢复到正常参数范围值区间后,中央集控器依据检测数据释放振动电机停机信号,流速、压力传感器原件持续状态巡检,中央集控器保持执行待机。6.一种采用权利要求1所述的基于数据学习的智能环保转运方法的环保转运料斗,包括料斗钢结构体、振动电机和连接于所述转运料斗本体的plc系统,所述环保转运料斗位于转运站,所述plc系统用于控制卸料斗本体上附着的振动电机的工作状态。7.根据权利要求6所述的环保转运料斗,其特征在于,还包括现场值守系统,所述现场值守系统和plc系统均连接于服务器平台,所述服务器平台连接于后台操作系统,实现堵料巡检与解决的无人值守。
技术总结
本发明公开了一种基于数据学习的智能环保转运方法,包括检测料流通过数据,后台中央集控器将得到的数据和设定模型对比,得输送量与积料程度;对异常数据进行计算并作出作用强度-作用时间的非线性关系曲线的PLC程序指令;按照所得PLC程序指令,执行振动除积料作业,并实时更新料流通过数据,后台中央集控器进一步优化执行解决方案;当料流通过数据恢复正常后,中央集控器发出振动电机停机信号并保持待机。与现有技术相比,本发明通过预先输送计算结果数据匹配振动电机最优工作指令程序,控制振动电机依据积存重量信息数据进而能够智能控制振动电机作调控业,实时调控工作强度与启停,实现积料解决的智能分析与方案决策。实现积料解决的智能分析与方案决策。实现积料解决的智能分析与方案决策。
技术研发人员:戚一男 涂璐 穆磊
受保护的技术使用者:泰富重工制造有限公司
技术研发日:2020.12.08
技术公布日:2022/6/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1