一种环焊缝自动识别方法及系统与流程
1.本发明涉及管道检测技术领域,尤其涉及一种环焊缝自动识别方法及系统。
背景技术:
2.管道作为天然气、石油等介质的长距离输送设施,被设于世界各地的陆地、海洋等各种环境之中。我国长输管道总里程已经超过11万里,定期进行管道内检测是保障安全运行的重要手段之一。漏磁内检测技术作为一种电磁无损检测技术对管道工况要求较低,能够实现缺陷的初步量化,所以目前在役管道的内检测主要采用漏磁技术。
3.一个完整的漏磁数据分析系统主要包括漏磁数据有效性判断、漏磁数据预处理、组件检测识别、管道缺陷检测识别、管道缺陷量化以及管道安全性评估六个模块。组件检测识别主要包括焊缝、法兰、阀门等,其中,环焊缝不仅作为管道中最常见组件,对于环焊缝的正确检测也直接关系到后续管道中缺陷检测;同时,环焊缝周围也是最容易发生缺陷的区域。所以,对于管道中环焊缝的自动识别非常重要。
4.一个良好的自动检测算法不但具备位置准确性和边缘准确性,同时要具备快速能力。在实际管道检测中,楼此数据对于管道中任何可能出现的异常都有信号上的显示,故要从中定位并识别出环焊缝极其困难,而且穷举式的搜索算法在信号复杂的管道试验中会耗费大量的时间。为了能够快速准确的定位到环焊缝的位置,提供一种能够快速准确的自动识别环焊缝的方法和系统时基本需求。
技术实现要素:
5.鉴于上述的分析,本发明实施例旨在提供一种环焊缝自动识别方法及系统,用以解决现有定位并识别环焊缝较为困难且花费时间较长的问题。
6.一方面,本发明实施例提供了一种环焊缝自动识别方法,包括:
7.获取待识别管道的漏磁信号数据;
8.对所述漏磁信号数据进行梯度域转换,获得梯度域数据;
9.对所述梯度域数据进行数据清洗,获得有效特征数据集;
10.对所述有效特征数据集进行窗体层级划分,获得窗体数据集;
11.对所述窗体数据集进行筛选,获得优选窗体数据集;
12.计算所述优选窗体数据集中的任意两个窗体的交叠程度,获得窗体最外围边界,根据所述窗体最外围边界确定所述环焊缝位置区域。
13.进一步的,所述对所述梯度域数据进行数据清洗,获得有效特征数据集包括:
14.设定梯度阈值,将梯度值大于所述梯度阈值的梯度域数据设置为所述有效特征数据集;
15.将梯度值小于所述梯度阈值的梯度域数据置零。
16.进一步的,对所述有效特征数据集进行窗体层级划分,获得窗体数据集包括:
17.将所述有效特征集划分为n个窗体层级f1,......,fk,......,fn,对每个所述窗体
层级进行窗体划分,获得初始窗体数据集{e1,......,ek,......en},其中,为第k个窗体层级的窗体集合,b为第k个窗体层级包含的窗体数;
18.将每一窗体层级的窗体集合中同一轴向区间的窗体进行环向合并,得到窗体数据集。
19.进一步的,所述对窗体数据集进行筛选,获得优选窗体数据集包括:
20.设定第一阈值范围以及第二阈值,根据窗体数据集中各个窗体的轴向长度和环向长度,对窗体数据集进行筛选,得到优选窗体数据集。
21.进一步的,所述计算所述优选窗体数据集中的任意两个窗体的交叠程度包括:
22.计算所述优选窗体数据集中的每一个窗体的窗体面积;
23.根据所述每一个窗体的窗体面积,计算所述优选窗体数据集中的任意两个窗体的交叠程度。
24.进一步的,所述获得窗体最外围边界包括:
25.设定交叠程度阈值,根据所述优选窗体数据集中的任意两个窗体的交叠程度以及所述交叠程度阈值判断所述任意两个窗体是否需要合并;
26.遍历所述优选窗体数据集中的所有窗体,获得窗体的最外围边界。
27.进一步的,所述交叠程度阈值为0.7。
28.进一步的,所述获取待识别管道的漏磁信号包括:
29.获得原始漏磁信号数据;
30.对所述原始漏磁信号数据进行有效性判断以及预处理。
31.另一方面,本发明实施例提供了一种环焊缝自动识别系统,包括:
32.梯度域转换模块,用于将漏磁信号数据转换为梯度域数据;
33.数据清洗模块,用于对梯度域数据进行数据清洗,获得有效特征数据集;
34.数据自适应修正模块,用于对所述有效特征数据集进行窗体层级划分,获得窗体数据集;
35.窗体筛选模块,用于对所述窗体数据集进行筛选,获得优选窗体数据集;
36.边缘精细化模块,用于计算所述优选窗体数据中的任意两个窗体的交叠程度,获得窗体最外围边界
37.与现有技术相比,本发明至少可实现如下有益效果之一:
38.1、采用将漏磁信号数据转换为梯度域数据,使得异常信号,即缺陷信号的边界处差异性变大,便于后续对梯度域数据进行数据清洗。
39.2、通过对梯度域数据进行数据清洗,提高后续数据处理的准确性以及效率。
40.3、采用划分窗体层级并将每一窗体层级的窗体集合中同一轴向区间的窗体进行环向合并,使得根据信号宽度自动定义窗体的尺寸,将信号特征用窗体表示,具有明显的快速性。
41.4、通过对窗体打分以及判断窗体交叠程度,能够快速准确的定位出环焊缝的位置区域。
42.本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而
易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
43.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
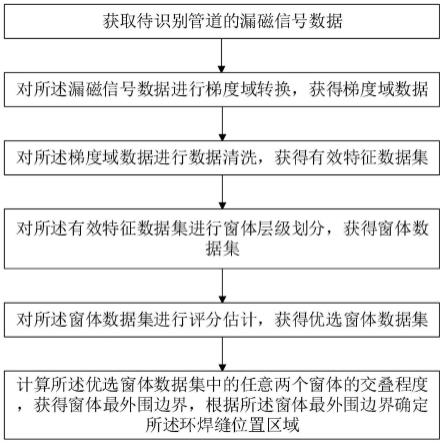
44.图1为本发明实施例中一种环焊缝自动识别方法的流程图;
45.图2为输入的漏磁信号数据示意图;
46.图3为梯度域数据示意图;
47.图4为经过数据清洗后的梯度域数据示意图;
48.图5(a)为窗体层级划分之后的窗体数据集示意图;
49.图5(b)为图5(a)的放大示意图;
50.图6为对窗体数据集筛选后的优选窗体数据集示意图;
51.图7为对优选窗体数据集进行边缘精细化处理后的窗体最外围边界示意图
52.图8为本发明实施例中一种环焊缝自动识别系统的框架图;
具体实施方式
53.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
54.本发明的一个具体实施例,公开了一种环焊缝自动识别方法,如图1所示,包括如下步骤:
55.步骤1:获取待识别管道的漏磁信号数据。
56.具体的,步骤1包括通过尾部安装有里程轮的漏磁内检测器获得原始漏磁信号数据,并且对原始漏磁信号数据进行有效性判断以及预处理,获得待识别管道的漏磁信号数据,例如图2所示,横坐标表示里程采集点,纵坐标表示高斯值。进一步的,有效性判断的标准为连续原始漏磁信号数据缺失小于等于管线长度的0.5%,非连续原始漏磁信号数据缺失小于等于管线长度的3%,连续原始漏磁信号数据缺失来源为小于4个相邻传感器或者25mm周长,其中,二者取最小值;预处理包括数据差值处理、异常值判断删除以及补充等。
57.步骤2:对漏磁信号数据进行梯度域转换,获得梯度域数据。
58.具体的,对漏磁信号数据进行梯度域转换,得到如图3所示的梯度域数据,求取梯度域数据可以使得环焊缝部位对应的信号差异更加明显,能够更加准确地定位到环焊缝的位置。
59.步骤3:对梯度域数据进行数据清洗,获得有效特征数据集。
60.具体的,设置梯度阈值,将梯度域数据中的梯度值大于梯度阈值的梯度域数据保留,形成有效特征数据集;将梯度值小于梯度阈值的梯度域数据置零,清洗后的梯度域数据示意图请参见图4。
61.可选的,基于正态分布统计概率,所述梯度阈值可以设置为|3σ|,具体的梯度阈值的大小可以根据实际情况进行确定,本技术对此不作限定。
62.步骤4:对有效特征数据集进行窗体层级划分,获得窗体数据集。
63.具体的,将有效特征数据集划分为n个窗体层级f1,......,fk,......,fn,对每个窗体层级进行窗体划分,获得初始窗体数据集{e1,......,ek,......en},其中,为第k个窗体层级的窗体集合,b为第k个窗体层级包含的窗体数;将每一窗体层级的窗体集合中同一轴向区间的窗体进行环向合并,得到窗体数据集,即,该窗体数据集是基于初始窗体数据集,并且对初始窗体数据集中的每一窗体层级的窗体集合中同一轴向区间的窗体进行环向合并得到的,对窗体层级进行划分后的示意图如图5(a)、图5(b)所示,图中的1~8为窗体的编号。因为环焊缝是环形,因此对窗体进行环向合并,有利于进一步筛选出环焊缝位置区域。
64.进一步的,根据有效特征集中梯度值的最大值以及最小值之间的差值,并对差值进行等值划分,得到窗体层级的个数;可选的,n可以选自3~10中的任一整数,进一步的,n可以设置为5,具体的n的大小可以根据实际情况确定,本技术对此不做限定。
65.步骤5:对窗体数据集进行筛选,获得优选窗体数据集,如图6所示,该步骤包括:设定第一阈值范围以及第二阈值,根据窗体数据集中各个窗体的轴向长度和环向长度,对窗体数据集进行筛选,得到优选窗体数据集。
66.具体的,所述窗体数据集中的窗体都存在轴向长度以及环向长度,轴向长度是指该窗体所占的采集点数;环向长度是指窗体所占的信号通道数;根据公式(1)对窗体的环向长度进行评估,根据公式(2)对窗体的轴向长度进行评估:
[0067][0068]
其中,si为窗体环向长度评估值,a为窗体环向长度,即窗体所占的信号通道数,num为检测器的全通道数,视检测器的具体规格而定。
[0069]
sj=b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0070]
其中,sj为窗体轴向长度评估值,b为窗体轴向长度,即该窗体所占的采集点数。
[0071]
当si大于第二阈值,且sj位于第一阈值范围内时,窗体数据集中符合该条件的窗体组成优选窗体数据集。可选的,第二阈值为0.8,第一阈值范围为15~30;第一阈值范围以及第二阈值可根据实际情况设定,本技术对此不做限定。
[0072]
步骤6:对优选窗体数据集进行边缘精细化处理,即,计算优选窗体数据集中的任意两个窗体的交叠程度,获得窗体最外围边界,根据所述窗体最外围边界确定所述环焊缝位置区域,如图7所示。
[0073]
步骤6.1:计算所述优选窗体数据集中的每一个窗体的窗体面积;
[0074]
步骤6.2:根据所述每一个窗体的窗体面积,计算所述优选窗体数据集中的任意两个窗体的交叠程度;
[0075]
具体如公式(2)所示:
[0076][0077]
o(pp
′
)为任意两个窗体的交叠程度,从公式(2)中可以看出任意两个窗体的交叠程度o(pp
′
)等于任意两个窗体的交集面积与任意两个窗体的并集面积的比值;其中,p和p
′
为优选窗体数据集中的任意两个窗体,area(p)为窗体p的窗体面积,area(p
′
)为窗体p
′
的
窗体面积。
[0078]
步骤6.3:设定交叠程度阈值,根据所述优选窗体数据集中的任意两个窗体的交叠程度以及所述交叠程度阈值判断所述任意两个窗体是否需要合并;
[0079]
具体的,当任意两个窗体的交叠程度大于等于所述交叠程度阈值时,将该两个窗口进行合并;当任意两个窗体的交叠程度小于所述交叠程度阈值时,则继续按照两个窗体进行后续操作。
[0080]
可选的,所述交叠程度阈值可以设置为0.7,可以根据具体情况对交叠程度阈值进行设定,本技术对此不作限定。
[0081]
步骤6.4:遍历所述优选窗体数据集中的所有窗体,获得窗体的最外围边界;
[0082]
可选的,选取优选窗体数据集中的任一窗体,根据上述方案一一判断该窗体与剩余其他窗体的交叠程度,进而判断该窗体与剩余其他窗体是否需要合并;选取该窗体之外的另一窗体,判断该另一窗体与剩余其他窗体(未与该另一窗体进行过判断的剩余窗体)的交叠程度,进而判断该另一窗体与剩余其他窗体是否需要合并;循环上述步骤,直至遍历优选窗体数据集中的所有窗体,得到最终的合并之后的窗体,保留窗体的最外围边界,根据合并后的窗体的最外围边界即可确定环焊缝位置区域。
[0083]
与现有技术相比,本实施例提供的环焊缝自动识别方法通过将漏磁信号数据转换为梯度域数据,对梯度域数据进行数据清洗、窗体层级划分、窗体筛选以及交叠程度判断,提高了数据处理的效率以及准确性,能够快速准确的定位出管道中环焊缝的位置区域。
[0084]
本技术的一个具体实施例,公开了一种环焊缝自动识别系统,包括:
[0085]
输入模块,用于获取待识别管道的漏磁信号数据;
[0086]
梯度域转换模块,用于将漏磁信号数据转换为梯度域数据;
[0087]
数据清洗模块,用于对所述梯度域数据进行数据清洗,获得有效特征数据集;
[0088]
数据自适应修正模块,用于对所述有效特征数据集进行窗体层级划分,获得窗体数据集;
[0089]
窗体筛选模块,用于对所述窗体数据集进行筛选,获得优选窗体数据集;
[0090]
边缘精细化模块,用于计算所述优选窗体数据中的任意两个窗体的交叠程度,获得窗体最外围边界。
[0091]
与现有技术相比,本实施例提供的环焊缝自动识别系统通过输入模块、梯度域转换模块、数据清洗模块、数据自适应修正模块、窗体筛选模块以及边缘精细化模块的结合,提高了数据处理的效率以及准确性,能够快速准确的定位出管道中环焊缝的位置区域。
[0092]
在本技术的一个具体实施例中,环焊缝自动识别系统还包括:
[0093]
输出模块,用于接收边缘精细化模块输出的窗体最外围边界信息并处理,得到环焊缝位置区域信息。
[0094]
本领域技术人员可以理解,实现上述实施例方法的全部或部分流程,可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于计算机可读存储介质中。其中,所述计算机可读存储介质为磁盘、光盘、只读存储记忆体或随机存储记忆体等。
[0095]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1