基于动态数据分析的公共空间行人流运动风险判别方法与流程
1.本发明涉及行人流运动风险判断技术,特别涉及一种基于动态数据分析的公共空间行人流运动风险判别方法。
背景技术:
2.公共空间在人们的生活中随处可见,其重要程度不言而喻。随着人们生活水平的提高,在公共空间的活动也越来越多,不论是日常通勤、娱乐,还是大型集会都离不开公共空间的支持。因此人群在公共空间活动的安全性显得尤为重要,如果发生人群踩踏事件,不仅会扰乱社会治安秩序,造成只有及时有效地掌握公共空间的行人状态,才能在异常发生伊始及时加以干预与调控,稳定行人流的秩序。
3.由于相关分析数据的匮乏,目前对于行人流运动风险的判别缺乏有效性和时效性。当前学术界对于行人监控、风险识别主要聚焦于以下两点:(1)静态异常点识别。主要为行人异常行为的识别,如下蹲、跳跃、爬行、奔跑;(2)基于大型踩踏事件的视频分析。这类研究主要通过历史上真实发生的灾难视频获得数据,或者由大学或实验室进行实验所得的数据。但是这两点中,前者识别出的异常行为与行人冲突、行人状态风险之前的联系不紧密,后者通常为事后分析,即对已发生的事故分析,时效性不足。
技术实现要素:
4.本发明的目的是提供一种基于动态数据分析的公共空间行人流运动风险判别方法,能实时进行行人流状态和风险水平的评估,时效性高,有效性高。
5.本发明的上述技术目的是通过以下技术方案得以实现的:
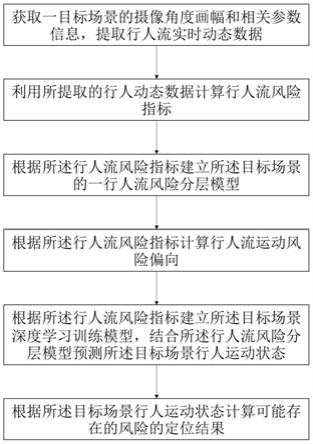
6.一种基于动态数据分析的公共空间行人流运动风险判别方法,包括有以下步骤:
7.s1、获取一目标场景的摄像角度画幅信息和相关参数信息,提取行人流实时动态数据;
8.s2:利用提取的行人流实时动态数据计算获取行人流风险指标;
9.s3:根据行人流风险指标建立所述目标场景的一行人流风险分层模型;
10.s4:根据行人流风险指标计算获取行人流运动风险偏向;
11.s5:根据行人流风险指标建立目标场景深度学习训练模型,并结合行人流风险分层模型预测所述目标场景的行人运动状态;
12.s6:根据所述目标场景的行人运动状态计算获取存在的风险定位结果。
13.作为优选,步骤s1具体包括有:
14.选择目标场景,包括有室内及室外公共场所;
15.确定摄像角度画幅信息,确定相关参数信息,相关参数信息包括有相关集合尺寸参数及测距参照物长度;
16.通过摄像角度画幅信息相关参数信息将拍摄画面投影成二维俯视图;
17.提取二维俯视图中的行人流实时动态数据。
18.作为优选,步骤s2具体包括有:
19.计算获取行人流风险指标,包括有人群速度方差、互信息、速度方向大小熵、粒子熵变化率、异常度能量、总能量、帧非同向指数、帧非同向指数变化率、冲突次数、受力和,具体计算分别为:
20.(1)人群速度方差:
[0021][0022]
(2)互信息:
[0023]
i(x,y)=h(x)+h(y)
‑
h(x,y)
[0024]
其中,
[0025]
h(x)和h(x,y)分别为熵与联合熵的计算公式,p(x
i
)为视频某帧下位于第i个区间内的速度方向概率分布;
[0026]
(3)速度方向大小熵:
[0027]
e=e
m
·
e
d
[0028]
其中,p(x
m,i
)为视频某帧下位于第i个区间内的速度大小概率分布;e
d
=h(x)。
[0029]
(4)粒子熵变化率:
[0030][0031]
其中,dt为一次分析时长;
[0032]
(5)异常度能量:
[0033][0034]
其中,p
i
为图像中速度交点个数,s
i
为交点区域所占图像上的面积;
[0035]
(6)总能量:
[0036][0037]
其中,v
i
为第i个行人的速度,a=2000n,b=0.08m,d=2m,d
ij
为行人i与行人j之间的距离;
[0038]
(7)帧非同向指数:
[0039][0040]
其中,n为该时刻下行人个数,c
pi
为当前帧中所有运动行人的非同向运动,当运动速度方向超过90
°
时为非同向运动;
[0041]
(8)帧非同向指数变化率:
[0042][0043]
其中,dt为一次分析时长;
[0044]
(9)冲突次数:
[0045][0046]
其中,θ
ij
为行人i与j速度矢量夹角;
[0047]
(10)受力和:
[0048][0049]
其中,τ=0.5s,τ=0.5s,为i指向j的单位切向量,r
i
、r
j
分别为行人i与j的理论半径,d
ij
为行人间距离,为行人指向目的地切向单位向量。
[0050]
作为优选,步骤s3中建立的行人流风险分层模型具体为:
[0051][0052]
其中,conf
i
为冲突态衡量指标,包括人群速度方差、速度方向大小熵、粒子熵变化率、帧非同向指数、帧非同向指数变化率;cong
i
为拥挤态衡量指标,包括互信息、异常度能量、冲突次数、受力和、总能量;为对应冲突态和拥挤态的指标权重,由二元logit模型得到。
[0053]
作为优选,冲突态和拥挤态的指标权重的计算获取具体如下:
[0054]
将行人实时动态数据集中,计算每时刻下行人流风险指标,形成行人状态数据集,将行人状态数据集其中60%数据作为训练集,设定人群异常情况,对训练集添加人群状态异常与否,形成完整训练数据;
[0055]
设定人群状态界限如下:正常态用“0”表示,指行人流平稳有序地运行;异常态用“1”,指行人有明显的回避、停顿、改变行走轨迹或聚集和拥挤现象;
[0056]
根据训练集中的完整数据,利用二元logit模型预测剩余40%数据,得到每个指标
i的相对危险度or
i
;
[0057]
根据每个指标i的or
i
计算行人流风险指标权重b
i
:
[0058]
sum
i
=∑or
i
,i∈conf or i∈cong
[0059]
b
i
=or
i
/sum
i
[0060]
根据行人流风险指标权重根据行人流风险指标权重计算冲突态与拥挤态的状态权重
[0061][0062][0063]
作为优选,步骤s4中计算行人流运动风险偏向具体为:
[0064]
通过冲突度d
cof
与拥挤度d
cong
描述人群中冲突和拥挤的程度,具体计算分别为:
[0065][0066]
s
conf
为冲突性衡量指标集合;
[0067][0068]
s
cong
为拥挤性衡量指标集合;
[0069]
x
i
,x
j
为离差标准化后数据。
[0070]
作为优选,步骤s5中建立目标场景深度学习训练模型如下:
[0071]
选取训练指标为行人流风险指标的十项一维训练指标及四组16维hof频率统计直方图指标;
[0072]
通过基于matlab中libsvm平台的模型训练模块进行分类训练;
[0073]
二维空间中,计算公式如下:
[0074][0075]
其中,x,y为样本,t
i
为拉格朗日乘子,为拉格朗日乘子的特解,k(x,y)为内积核函数;
[0076]
结合行人流风险分层模型及目标场景深度学习训练模对行人运动状态进行预测,若预测值为异常,则进入下一步;若预测值为正常,则返回步骤s3。
[0077]
作为优选,16维hof频率统计直方图指标具体:
[0078]
计算行人速度大小统计直方图hofm、行人速度方向统计直方图hofo、行人加速度
大小统计直方图hofa,将直方图划分为16组进行计算;
[0079]
计算行人间作用力大小统计直方图hoff,计算每时刻下目标场景中每个目标行人所受挤压力的和,计算公式如下:
[0080][0081]
其中,为行人i与j之间距离坐标,分别为行人位置坐标,分别为行人i、j的速度矢量,θ为方向与i指向j的夹角,参数设置如下:a=4.5,γ=0.35,λ=2.0,n=2.0,n
′
=3.0。
[0082]
作为优选,步骤s6具体为:
[0083]
对行人运动状态进行判断,若行人运动状态为异常,根据风险定位公式进行计算,
[0084][0085]
其中,研究区域被划分成0.15*0.15m的网格,通过运动轨迹计算每个网格内的速度矢量用于计算;特定区域roi由直径为7个网格单位组成,以研究对象为中心的3*3网格区域用于计算速度旋度r
z
;max(r
z
)和min(r
z
)分别为以研究对象为中心的3*3网格区域中的速度旋度最大值与最小值,为特定区域中的速度平均值;ρ为该位置的局部密度,通过维诺图计算得到。
[0086]
综上所述,本发明具有以下有益效果:
[0087]
基于目标场景的行人实时动态数据的提取,时效性高,根据行人流风险分层模型、目标场景深度学习训练模型能进行行人流运动风险的分析和行人运动状态的获取,高效、有效的获取、预测行人流运动风险。
附图说明
[0088]
图1为本方法的流程示意框图;
[0089]
图2为本方法具体步骤图;
[0090]
图3为实例中行人流风险指标计算结果图;
[0091]
图4为实例中预测得到每个指标的odd ratio结果图;
[0092]
图5为实例中行人流运动风险偏向计算数据图;
[0093]
图6为实例中行人流运动风险偏向结果图;
[0094]
图7为实例中16维hof频率统计直方图指标部分结果图;
[0095]
图8为实例中目标场景及绘出的热力图。
具体实施方式
[0096]
以下结合附图对本发明作进一步详细说明。
[0097]
根据一个或多个实施例,公开了一种基于动态数据分析的公共空间行人流运动风险判别方法,如图1所示,包括有以下步骤:
[0098]
s1、获取一目标场景的摄像角度画幅信息和相关参数信息,提取行人流实时动态数据;
[0099]
s2:利用提取的行人流实时动态数据计算获取行人流风险指标;
[0100]
s3:根据行人流风险指标建立目标场景的一行人流风险分层模型;
[0101]
s4:根据行人流风险指标计算获取行人流运动风险偏向;
[0102]
s5:根据行人流风险指标建立目标场景深度学习训练模型,并结合行人流风险分层模型预测目标场景的行人运动状态;
[0103]
s6:根据目标场景的行人运动状态计算获取存在的风险定位结果。
[0104]
具体步骤如图1及图2所示。
[0105]
具体的步骤s1中选择目标场景,可以为室内及室外公共场所;具体步骤如下:
[0106]
确定摄像角度画幅信息,确定相关参数信息,相关参数信息包括有相关集合尺寸参数及测距参照物长度;
[0107]
通过摄像角度画幅信息相关参数信息将拍摄画面投影成二维俯视图,并提取获得二维俯视图中的行人流实时动态数据,包括进入画面的行人id,行人位于画面中的像素坐标以及拍摄时间。
[0108]
若有多个场景,可每个单独场景计算指标完成步骤s2后进行汇总,再进行步骤s3及之后的步骤。
[0109]
步骤s2利用所提取的行人实时动态数据计算行人流风险指标,行人流风险指标包括有人群速度方差、互信息、速度方向大小熵、粒子熵变化率、异常度能量、总能量、帧非同向指数、帧非同向指数变化率、冲突次数、受力和,具体计算分别为:
[0110]
(1)人群速度方差:
[0111]
互信息:
[0112]
i(x,y)=h(x)+h(y)
‑
h(x,y)
[0113]
其中,
[0114]
h(x)和h(x,y)分别为熵与联合熵的计算公式,p(x
i
)为视频某帧下位于第i个区间内的速度方向概率分布。
[0115]
(2)互信息:
[0116]
i(x,y)=h(x)+h(y)
‑
h(x,y)
[0117]
其中,
[0118]
h(x)和h(x,y)分别为熵与联合
熵的计算公式,p(x
i
)为视频某帧下位于第i个区间内的速度方向概率分布。
[0119]
(3)速度方向大小熵:
[0120]
e=e
m
·
e
d
[0121]
其中,p(x
m,i
)为视频某帧下位于第i个区间内的速度大小概率分布;e
d
=h(x)。
[0122]
(4)粒子熵变化率:
[0123][0124]
其中,dt为一次分析时长。
[0125]
(5)异常度能量:
[0126][0127]
其中,p
i
为图像中速度交点个数,s
i
为交点区域所占图像上的面积;
[0128]
(6)总能量:
[0129][0130]
其中,v
i
为第i个行人的速度,a=2000n,b=0.08m,d=2m,d
ij
为行人i与行人j之间的距离。
[0131]
(7)帧非同向指数:
[0132][0133]
其中,n为该时刻下行人个数,c
pi
为当前帧中所有运动行人的非同向运动,当运动速度方向超过90
°
时为非同向运动。
[0134]
(8)帧非同向指数变化率:
[0135][0136]
其中,dt为一次分析时长。
[0137]
(9)冲突次数:
[0138][0139]
其中,θ
ij
为行人i与j速度矢量夹角。
[0140]
(10)受力和:
[0141][0142]
其中,τ=0.5s,τ=0.5s,为i指向j的单位切向量,r
i
、r
j
分别为行人理论半径,取0.5米,d
ij
为行人间距离,为行人指向目的地切向单位向量。
[0143]
步骤s3中建立的行人流风险分层模型具体为:
[0144][0145]
其中,conf
i
为冲突态衡量指标,包括人群速度方差、速度方向大小熵、粒子熵变化率、帧非同向指数、帧非同向指数变化率,分别与前文中(1)、(3)、(4)、(7)、(8)对应;cong
i
为拥挤态衡量指标,包括互信息、异常度能量、冲突次数、受力和、总能量,分别与前文中(2)、(5)、(9)、(10)、(6)对应;为对应冲突态和拥挤态的指标权重,由二元logit模型得到。临界阈值根据实验情况设定,取第三四分位数。
[0146]
冲突态和拥挤态的指标权重的计算获取具体如下:
[0147]
将行人实时动态数据集中,计算每时刻下指标(1)
‑
(10),形成行人状态数据集。将其中60%数据作为训练集,设定人群异常情况,对训练集添加人群状态异常与否,形成完整训练数据。完整训练数据包括训练集以及人为添加的人群状态;
[0148]
设定人群状态界限如下:正常态用“0”表示,指行人流平稳有序地运行;异常态用“1”,指行人有明显的回避、停顿、改变行走轨迹或聚集和拥挤现象;
[0149]
根据训练集中的完整数据,利用二元logit模型预测剩余40%数据,得到每个指标i的相对危险度or
i
(odd ratio);
[0150]
根据每个指标i的or
i
计算行人流风险指标权重b
i
:
[0151]
sum
i
=∑or
i
,i∈conf or i∈cong
[0152]
b
i
=or
i
/sum
i
[0153]
根据行人流风险指标权重计算冲突态与拥挤态的状态权重
[0154]
[0155][0156]
步骤s4中计算行人流运动风险偏向具体为:
[0157]
通过冲突度d
conf
与拥挤度d
conf
描述人群中冲突和拥挤的程度,通过s3步骤得到,具体计算分别为:
[0158][0159]
s
conf
为冲突性衡量指标集合;
[0160][0161]
s
cong
为拥挤性衡量指标集合;
[0162]
x
i
,x
j
为离差标准化后数据。
[0163]
根据冲突度d
conf
与拥挤度d
cong
绘制其随时间变化波动图像,可以得知每时刻下人群中风险偏向。
[0164]
步骤s5中建立目标场景深度学习训练模型具体如下:
[0165]
选取训练指标为行人流风险指标的十项一维训练指标及四组16维hof频率统计直方图指标;
[0166]
通过基于matlab中libsvm平台的模型训练模块进行分类训练,常量与参数选择按照平台默认值设置;
[0167]
以二维空间为例,在二维空间中,计算公式如下:
[0168][0169]
其中,x,y为样本,t
i
为拉格朗日乘子,为拉格朗日乘子的特解,k(x,y)为内积核函数;
[0170]
结合行人流风险分层模型(s3)及目标场景深度学习训练模型(s5)对行人运动状态进行预测,若预测值为异常,则进入下一步s6;若预测值为正常,则返回步骤s3。
[0171]
其中,16维hof频率统计直方图指标具体包括有:
[0172]
计算行人速度大小统计直方图hofm、行人速度方向统计直方图hofo、行人加速度大小统计直方图hofa,将直方图划分为16组进行计算;
[0173]
计算行人间作用力大小统计直方图hoff,计算每时刻下目标场景中每个目标行人所受挤压力的和,计算公式如下:
[0174][0175]
其中,为行人i与j之间距离坐标,分别为行人位置坐标,分别为行人i、j的速度矢量,θ为方向与i指向j的夹角,参数设置如下:a=4.5,γ=0.35,λ=2.0,n=2.0,n
′
=3.0。
[0176]
在步骤s6中,对行人运动状态进行判断,若行人运动状态为异常,根据风险定位公式进行计算,
[0177][0178]
其中,研究区域被划分成0.15*0.15m的网格,通过运动轨迹计算每个网格内的速度矢量用于计算;特定区域roi由直径为7个网格单位组成,以研究对象为中心的3*3网格区域用于计算速度旋度r
z
;max(r
z
)和min(r
z
)分别为以研究对象为中心的3*3网格区域中的速度旋度最大值与最小值,为特定区域中的速度平均值,cl为congestion level拥挤水平,cd为congestion danger拥挤风险。ρ为该位置的局部密度,通过维诺图计算得到,计算间隔为0.3秒,绘出热力图。
[0179]
本次方法基于监控设备,能够实时获得行人对应坐标与id等实时数据,对公共空间下行人流风险状态进行判别,包含了支持向量机预测模型与二元logit回归预测。与现有技术相比,本方法适用于数据样本量较小的情况,通过获取行人数据实时预测行人流运动风险,时效性高;结合支持向量机模型,有较强推广性,不局限于某一特定数据集。
[0180]
为表述清楚,现举一实例:
[0181]
步骤s1中,取场景一与场景二的相关信息,经过变换,获得场景一长宽为8m*10m,场景二长宽为10m*18m。进行行人流实时动态数据的提取。
[0182]
s2中利用提取的行人实时动态数据计算行人流风险指标,部分计算结果如图3所示。
[0183]
s3根据行人流风险指标建立行人流风险分层模型,为:
[0184][0185]
将行人实时动态数据集中60%数据作为训练集设定人群异常情况,添加人群异常与否(0/1),形成完整数据。设定界限如上述,状态设定结果如图4所示。
[0186]
根据训练集集中的完整数据,利用二元logit模型预测剩余40%数据,得到每个指标i的odd ratio(or
i
),如图5所示。
[0187]
根据每个指标i的odd ratio(or
i
)计算指标权重b
i
:
[0188]
sum
cong
=0.998+0.001+0.909+1.006+1.000=3.917
[0189]
其他指标以此类推
[0190]
根据指标权重计算冲突态与拥挤态的状态权重
[0191][0192][0193]
s4根据行人流行人流风险指标计算行人流运动风险偏向,计算行人流运动风险偏向冲突度d
conf
与拥挤度d
cong
,分别用来描述人群中冲突与拥挤的程度,结果如图6所示。
[0194]
s5中建立目标场景深度学习训练模型,结合行人流风险分层模型预测目标场景中行人运动状态,取步骤s3与步骤s5的并集作为行人运动状态预测值,若预测值为异常,进行步骤s6;如否,返回步骤s3。
[0195]
计算hofm、hofo、hofa;计算hoff即行人间作用力大小统计直方图,部分结果如图7所示。
[0196]
s6根据目标场景行人运动状态计算可能存在的风险的定位结果。研究区域被划分成0.15*0.15m的网格,场景一中存在54*67个网格,通过运动轨迹计算每个网格内的速度矢量用于计算。计算间隔为0.3秒。绘出热力图如图8所示。
[0197]
本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1