一种点云主曲率方向计算方法与流程与流程
1.本发明具体涉及一种点云主曲率方向计算方法与流程,属于图形与可视化领域。
背景技术:
2.点云是一种能够表示三维模型表面数据的一种形式。主曲率方向能够表征点云特征在局部曲面的走向,能够为几何特征的表达和处理提供重要的信息。目前主曲率方向的估计方法大致可以分为三大类。第一类是进行局部曲面拟合,求出二次或者三次曲面,再根据微分几何理论求出主曲率和主方向;第二类是先对点云数据进行网格化,再取一个或者二个环内的近邻点进行主曲率或者主方向的估计;第三大类是直接对点云数据进行微分几何特征量的计算。
3.在传统的利用二次曲面拟合邻域点求取曲率的方法中,主曲率方向是曲率求解的附带结果,并且直接从点云进行计算时,有些方法只是利用点的位置信息,没有利用各个点的法向量信息,这样会使得方法的鲁棒性较差;也有一些方法用了法向量信息,但是他们往往结合第一类方法,把法向量作为一个约束条件加以利用,增加了主曲率和主方向模型求解的计算时间和存储空间的开销。
4.综上所述,在点云主曲率方向计算领域仍有一些问题需研究来攻克。
技术实现要素:
5.本发明的目的在于提供一种点云主曲率方向计算方法与流程。根据微分几何理论,曲面在最大/最小主曲率方向上的密切圆半径最小/最大;相应的,局部曲面在相应方向上的法向量变化取得极值,鉴于此,本发明考虑到将主曲率方向计算转换为寻找局部曲面法向量变化极值问题进行处理。
6.为达到此目的,本发明提供如下的技术方案:
7.一种点云主曲率方向计算方法与流程,包括以下步骤:
8.s1:建立以当前点为坐标原点,以当前点法向量为z轴的局部坐标系;
9.s2:在局部坐标系内创建过当前点且分别以x,y轴为法向量的平面,同时,以到平面距离为权重计算领域点的法向变化;
10.s3:将步骤s2所计算出的法向变化量较大的平面绕z轴向法向变化量较小的平面旋转45
°
;
11.s4:重新计算以到平面距离为权重的领域点的法向变化,并且将重新计算出的法向变化量较大的平面绕z轴向法向变化量较小的平面旋转,且每次迭代时旋转角度减半;
12.s5:重复步骤s4直到旋转角度小于一定阈值后退出计算过程。
13.进一步的,所述步骤s1包括:建立以当前点p为原点,以点p的法向量为z轴正向的局部坐标系。
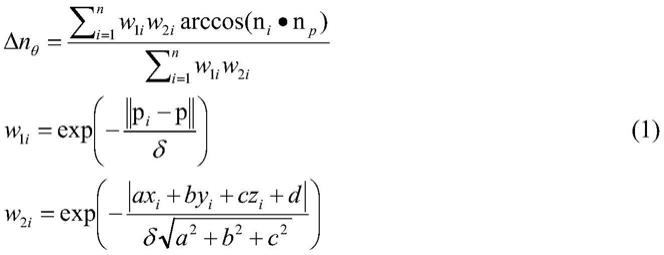
14.进一步的,所述步骤s2包括:设置两个相互垂直的平面u(0,1,0,0)和平面v(1,0,0,0),并分别利用式(1)所示的基于双边加权的方法求取当前点p在方位θ上的法向量变化
△
n
θ
;
[0015][0016]
其中,n为邻域点个数;p
i
表示邻域范围内第i个点;p
i
点的坐标为(x
i
,y
i
,z
i
);n
p
和n
i
分别是当前点及其邻域点的法向量;||p
i
‑
p||表示点p
i
与点p的距离;δ为局部点云密度的3倍;w
1i
是按照p
i
与当前点p间欧式距离进行的加权,其作用是使靠近当前点p的邻域点拥有大的权值,而远离当前点p的邻域点权值较小;w
2i
是按照邻域点到分割平面的距离进行的加权,其作用是使靠近分割平面的邻域点具有大的权值,而远离分割平面的邻域点具有较小的权值;分割平面过当前点p且在局部微切平面内的投影是方向向量为θ的直线,由参数a,b,c,d确定。
[0017]
进一步的,所述步骤s3包括:将法向变化量较大的平面绕坐标轴z轴正方向向法向变化量较小的平面旋转45
°
,完成首次迭代。
[0018]
进一步的,所述步骤s4包括:
[0019]
每次都基于更新的u、v平面重新计算相应方向上的法向变化;
[0020]
将法向变化量较大的平面向法向变化量较小的平面旋转靠近;同时,每次迭代将旋转角度减半,直到旋转角度小于阈值0.35
°
,然后退出计算过程,其中旋转次数与计算误差之间的关系如式(2)所示:
[0021][0022]
其中n为旋转次数。
[0023]
有益效果:
[0024]
本发明采用了剪刀法求取主曲率方向,从容易获得较高计算精度的法向量入手,具备良好的准确性和鲁棒性。
附图说明
[0025]
图1.本发明的流程图。
[0026]
图2.剪刀法求取主曲率方向示意图。
[0027]
图3.本发明对cad_workpart_uniform模型进行主曲率方向计算结果示意图。
具体实施方式
[0028]
下面结合附图1~3对本发明的技术方案做进一步的详细说明。
[0029]
本发明提供一种点云主曲率方向计算方法与流程,如图1和图2所示,包括以下步骤:
[0030]
s1:建立以当前点为坐标原点,以当前点法向量为z轴的局部坐标系;具体包括:建
立以当前点p为原点,以点p的法向量为z轴正向的局部坐标系。
[0031]
s2:在局部坐标系内创建过当前点且分别以x,y轴为法向量的平面,同时,以到平面距离为权重计算领域点的法向变化;
[0032]
具体包括:设置两个相互垂直的平面u(0,1,0,0)和平面v(1,0,0,0),并分别利用式(1)所示的基于双边加权的方法求取当前点p在方位θ上的法向量变化
△
n
θ
;
[0033][0034][0035][0036]
其中,n为邻域点个数;p
i
表示邻域范围内第i个点;p
i
点的坐标为(x
i
,y
i
,z
i
);n
p
和n
i
分别是当前点及其邻域点的法向量;||p
i
‑
p||表示点p
i
与点p的距离;δ为局部点云密度的3倍;w
1i
是按照p
i
与当前点p间欧式距离进行的加权,其作用是使靠近当前点p的邻域点拥有大的权值,而远离当前点p的邻域点权值较小;w
2i
是按照邻域点到分割平面的距离进行的加权,其作用是使靠近分割平面的邻域点具有大的权值,而远离分割平面的邻域点具有较小的权值;分割平面过当前点p且在局部微切平面内的投影是方向向量为θ的直线,由参数a,b,c,d确定。
[0037]
s3:将步骤s2所计算出的法向变化量较大的平面绕z轴正方向向法向变化量较小的平面旋转45
°
,完成首次迭代。
[0038]
s4:重新计算以到平面距离为权重的领域点的法向变化,并且将重新计算出的法向变化量较大的平面绕z轴向法向变化量较小的平面旋转,且每次迭代时旋转角度减半;
[0039]
具体包括:每次都基于更新的u、v平面重新计算相应方向上的法向变化;
[0040]
将法向变化量较大的平面向法向变化量较小的平面旋转靠近;同时,每次迭代将旋转角度减半,直到旋转角度小于阈值0.35
°
,然后退出计算过程,其中旋转次数与计算误差之间的关系如式(2)所示:
[0041][0042]
其中n为旋转次数。
[0043]
s5:重复步骤s4直到旋转角度小于一定阈值后退出计算过程。
[0044]
如图2所示,本发明采用了剪刀法求取主曲率方向。
[0045]
本发明对cad_workpart_uniform模型进行主曲率方向计算,其结果如图3所示,本发明的主曲率方向求取算法直接从点云进行计算,并且充分利用各个点的法向量信息,具有较好的准确性和鲁棒性。
[0046]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1