基于墨西哥帽检测的探地雷达异常数据去除方法与流程
1.本发明涉及雷达信号处理技术领域,尤其是基于墨西哥帽检测的探地雷达异常数据去除方法。
背景技术:
2.在探地雷达技术中,理想情况下,浅层探地雷达设备工作时候是紧贴地面,采集到的雷达波数据从地面开始。但是,实际情况下,为了防止在雷达设备的磨损,雷达设备会涉及离地面一定距离。理想状态时,探地雷达机器人收到的探地雷达波数据的前端有部分数据为空气直达波,然后电磁波信号从空气介质进入地面介质,由于介电常数发生变化,雷达反射波的振幅发生变化,在整个雷达波上形成一个“墨西哥帽”。
3.在实际工作中,探地雷达处于一个高频的工作状态,并且探地雷达机器人是一个多方协作的系统,其他任何部件都可能影响雷达传感器,以及其收到的数据,所以各种复杂的原因,造成收到的雷达数据中,有部分数据为异常数据。异常数据对成像和分析都有一定影响,在进行探地雷达数据分析之前,应该将探地雷达数据中的异常数据去掉。现有技术的去除雷达异常数据,通常情况是:计算每个ascan的分段能量,统计出所有ascan每一段的能量均值,设置阈值,滤除能量不在预期范围内ascan数据,该方法适用于检测对象比较平稳时。但当检测的地面存在有目标时,其不同于其他区域的介电常数时,若依然采用常规的算法就会导致包含了目标信息的ascan被错误地去除掉。
4.另外,专利申请号为“201210134203.0”、名称为“一种地下水分布的确定方法”的中国发明专利,其首先对采集到的地质雷达数据进行去除干扰信号处理;再对除了干扰信号的地质雷达数据,计算低频信号能量占有率,获得含水属性数据;最后对含水属性数据进行剖面成像处理,显示地下水分布情况。但是,该技术存在以下问题:
5.第一,仅能完成对地下水的探测和异常数据去除,而无法适应大部分场景;第二,其采用的小波变换中没有使用多尺度进行处理,导致会对异常数据产生漏判;第三,该技术采用固定频率的低切滤波导致无法适应多种频率的探地雷达。
6.因此,急需要提出一种逻辑简单、去除可靠的基于墨西哥帽检测的探地雷达异常数据去除方法。
技术实现要素:
7.针对上述问题,本发明的目的在于提供一种基于墨西哥帽检测的探地雷达异常数据去除方法,本发明采用的技术方案如下:
8.基于墨西哥帽检测的探地雷达异常数据去除方法,包括以下步骤:
9.获取单个雷达波形ascan的雷达信号数据;
10.对所述雷达波形ascan进行统计并求得均值,雷达波形ascan的任一采样点减去均值,以去除雷达波形ascan中的直流分量,其表达式为:
[0011][0012]
其中,a
′
i
表示去除直流分量后的第i采样点的雷达信号数据,a
i
表示第i采样点的雷达信号数据,n表示采样点的数量;
[0013]
对去除直流分量后的雷达波形ascan进行多尺度小波变换,形成个长度为n的复数数据,并进行取模得到矩阵,所述取模满足以下公式:
[0014][0015]
其中,b
i
表示第i个采样点在经过多尺度小波变换后的值,表示多尺度小波变换雷达波形ascan的尺度最大值,表示多尺度小波变换雷达波形ascan的尺度最小值,t表示多尺度变换间隔;所述f表示雷达信号对应的频率;所述t小于n、且大于0的整数;所述t为大于0的自然数;
[0016]
对所述矩阵进行归一化至0~255,得到显示图像,其表达式为:
[0017][0018]
所述b
max
表示同一尺度变换后的最大值;
[0019]
将所述显示图像转换成二值图,其表达式为:
[0020][0021]
求得二值图的连通域;若连通域的数量为1,则表示检测到一个墨西哥帽波形;否则,该雷达波形ascan的雷达信号数据为异常数据,并进行去除。
[0022]
优选地,所述t取值为20,且所述t取值为0.25。
[0023]
与现有技术相比,本发明具有以下有益效果:
[0024]
(1)本发明根据探地雷达信号具备单个“墨西哥帽”的特点,首先进行零偏去除,去掉信号中直流分量对结果的影响,随后进行多尺度的小波变换从而检测“墨西哥帽”,最终根据小波变换后图像求取连通域,根据连通域个数可以判断是否为异常数据从而进行有效去除;
[0025]
(2)本发明巧妙地采用多尺度小波变换,并进行取模得到矩阵,其好处在于可以适应多种场景,多尺度的进行卷积,保证可以检测到“墨西哥帽”。
[0026]
综上所述,本发明具有逻辑简单、去除可靠等优点,在雷达信号处理技术领域具有很高的实用价值和推广价值。
附图说明
[0027]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需使用的附图
作简单介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对保护范围的限定,对于本领域技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0028]
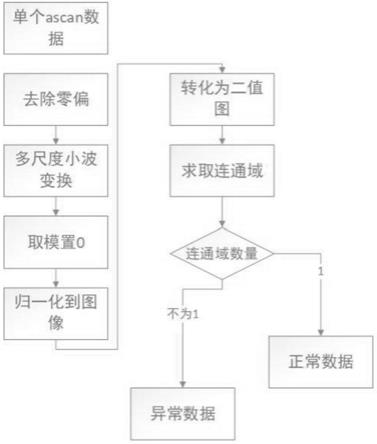
图1为本发明的逻辑流程图。
[0029]
图2为本发明中单个正常雷达信号数据波形图。
[0030]
图3为本发明中单个异常雷达信号数据波形图。
[0031]
图4为本发明中异常雷达信号数据图像。
[0032]
图5为本发明中去除零偏后的效果图。
[0033]
图6为本发明中正常数据多尺度小波变换后二值图。
[0034]
图7为本发明中异常数据多尺度小波变换后二值图。
[0035]
图8为本发明中去除异常雷达数据后的探地雷达图像。
具体实施方式
[0036]
为使本申请的目的、技术方案和优点更为清楚,下面结合附图和实施例对本发明作进一步说明,本发明的实施方式包括但不限于下列实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本申请保护的范围。
[0037]
实施例
[0038]
如图1至图8所示,本实施例针对雷达异常数据去除算法中可能去除掉正常的目标数据和场景适应性的不足,提供了基于墨西哥帽检测的探地雷达异常数据去除方法,首先进行零偏去除,去除零偏后,可以排除掉雷达信号中的直流分量,避免对后续的小波变换进行干扰;随后应用多尺度的小波变换对单个ascan进行卷积;最后,探测连通域,根据连通域数量判断是否为异常数据。
[0039]
在本实施例中,基于墨西哥帽检测的探地雷达异常数据去除方法包括以下步骤
[0040]
第一步,获取单个雷达波形ascan的雷达信号数据。
[0041]
第二步,对所述雷达波形ascan进行统计并求得均值,雷达波形ascan的任一采样点减去均值,以去除雷达波形ascan中的直流分量,其表达式为:
[0042][0043]
其中,a
′
i
表示去除直流分量后的第i采样点的雷达信号数据,a
i
表示第i采样点的雷达信号数据,n表示采样点的数量;
[0044]
第三步,对去除直流分量后的雷达波形ascan进行多尺度小波变换,形成个长度为n的复数数据,并进行取模得到矩阵,所述取模满足以下公式:
[0045][0046]
其中,b
i
表示第i个采样点在经过多尺度小波变换后的值,表示多尺度小波变换
雷达波形ascan的尺度最大值,表示多尺度小波变换雷达波形ascan的尺度最小值,t表示多尺度变换间隔;所述f表示雷达信号对应的频率。
[0047]
第四步,对所述矩阵进行归一化至0~255,得到显示图像,其表达式为:
[0048][0049]
所述b
max
表示同一尺度变换后的最大值。
[0050]
第五步,将所述显示图像转换成二值图,转化阈值为200,其表达式为:
[0051][0052]
第六步,求得二值图的连通域;若连通域的数量为1,则表示检测到一个墨西哥帽波形;否则,该雷达波形ascan的雷达信号数据为异常数据,并进行去除。
[0053]
上述实施例仅为本发明的优选实施例,并非对本发明保护范围的限制,但凡采用本发明的设计原理,以及在此基础上进行非创造性劳动而作出的变化,均应属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1