X光图像检查校正方法与流程
x光图像检查校正方法
技术领域:
1.本发明涉及图像处理技术领域,具体的说是一种能够降低x光图像失真变形、提高参数标定精度的x光图像检查校正方法。
背景技术:
2.在x光图像应用过程中,临床上广泛使用的c臂接收端是影像增强器,导致投影图像上不可避免地存在失真变形,从而影响c臂参数标定的精度,并会造成给三维重建结果造成一定的伪影。因此,c臂投影图像需要经过失真校正,才能用于术中三维锥束重建及术中导航。c臂投影图像失真类型复杂,并且很难为s型扭曲建立失真模型,因此无法用统一的几何方法校正失真图像。
技术实现要素:
3.本发明针对现有技术中存在的缺点和不足,提出了一种能够降低x光图像失真变形、提高参数标定精度的x光图像检查校正方法。
4.本发明通过以下措施达到:
5.一种x光图像检查校正方法,其特征在于,包括以下步骤:
6.步骤1:采集带有校正点的失真图像;
7.步骤2:用霍夫变换获取失真校正点的位置和尺寸,并计算失真校正点的理想不失真位置和尺寸;
8.步骤3:将理想不失真图像和失真图像之间的映射关系表示为:
[0009][0010]
其中:aj,bj为校正系数,a0和b0分别表示x和y方向的偏移,a1,b1,a2,b2表示像素的旋转,当j》2时,aj和bj没有明确的物理意义,用式(2)表示x方向或y方向校正系数的数量:其中n为多项式的阶数,n≥3;
[0011]
理想不失真校正参数si为:其中(xi,yi)为理想不失真图像上的一个点坐标,(pi,qi)为失真图像上对应的失真校正点坐标;
[0012]
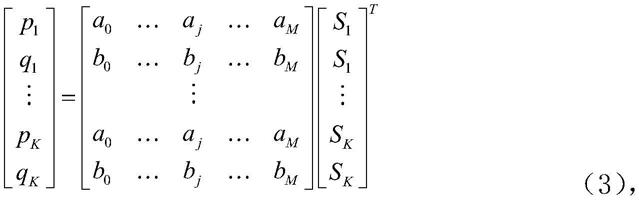
假设失真图像上有k个标记点,由公式(1)得到2k个方程,并进一步获得超定线性方程组式(3):
[0013][0014]
式(3)的最小二乘解就是最优化的全局校正系数,利用全局校正系数,建立失真图像和理想非失真图像之间的映射关系,然后利用向后映射法重建出非失真图像。
[0015]
本发明所述利用向后映射法重建出非失真图像具体为:
[0016]
循环失真图像上的每一个像素点,使用公式(4),公式(4)为二元三次多项式,其中ai,bi(i=0,1,2
…
9)为全局校正系数;根据全局校正系数和这个像素点的位置(x,y)计算该像素实际应该所在的位置(nx,ny),如果新位置(nx,ny)超出失真图像的范围,则对应未失真图像上位置(x,y)处的像素被置为0;反之,未失真图像上位置(x,y)处的像素被设置为失真图像上位置(nx,ny)处的像素。
[0017]
本发明步骤1中采集带有校正点的失真图像通过以下步骤实现:设置一个透明校正板,校正板上设置校正点阵列;把校正板固定在c型臂上相机的前面;使用c型臂采集带有校正点的失真图像,为了便于后续计算处理,校正板为圆形透明塑料板,校正点阵列中的校正点绕中心点对称且彼此等距分布。
[0018]
本发明利用多项式拟合来逼近c臂投影失真,不仅可以避免复杂的几何建模过程,而且不用分步校正失真图像。
附图说明:
[0019]
附图1是本发明实施例1中校正板的结构示意图。
[0020]
附图2是本发明的流程图。
具体实施方式:
[0021]
实施例1:
[0022]
本例提供了一种x光图像校正方法,其中图像校正过程如下:
[0023]
步骤1:采集带有校正点的失真图像;
[0024]
步骤1-1:首先设置一个透明材料制成的校正板,校正板上有56个校正点(点的分布参考附图1,56个校正点绕中心点对称,其中靠近中心点的第一层校正点由13个等间距分布的校正点围绕呈正方形,其中正方形的四个顶角均设有校正点,正方形的每个边长上设有4个校正点,第二层校正点的连线为与上述正方形相似的第二级正方形,第二级正方形边长与中心正方形边长的最短间距d2与中心正方形任意边长中相邻的两个点的间距d1相同,第二级正方形的四个侧边外侧分别设有一由四个校正点设置的校正点阵,校正点阵中校正点按间距d1或d2等间距设置,且校正点阵中的校正点与第二级正方形四个侧边内的校正点的最短间距也为d1或d2);
[0025]
步骤1-2:把校正板固定在c型臂上相机的前面;
[0026]
步骤1-3:使用c型臂采集带有56个校正点的失真图像;
[0027]
步骤2:对步骤1-3得到的失真图像去噪平滑锐化处理;
[0028]
步骤2-1:使用opencv中的中值模糊函数,对失真图像进行去噪声平滑处理;
[0029]
步骤2-2:使用opencv中的canny函数,对步骤2-1处理后的失真图像进行锐化处理;
[0030]
步骤3:通过校正板上的校正点半径大小,找到失真图像中的校正点的中心坐标和半径;
[0031]
步骤3-1:通过校正点半径大小计算识别最小半径(校正点半径
–
2mm)和识别最大半径(校正点半径+2mm),对步骤2-2处理后的失真图像循环使用步骤3-2的霍夫变换方法来获取失真的校正点信息;
[0032]
步骤3-2:霍夫变换方法具体过程,首先求取校正点的sobel变换算子与失真灰度图像之梯度矩阵或边缘强度图像之间的卷积,卷积结果为一个2d积累空间;然后对获得的2d积累空间进行分析,确定其中峰的位置及高度,对位置及高度数据再进行处理,最终求取失真图像中校正点的中心位置及尺寸大小;
[0033]
步骤4:根据失真图像上的校正点坐标,计算出校正点应该所在的实际位置:
[0034]
步骤4-1:根据x光图像特点:图像中心的点失真最小,找到距离图像中心最近的几个点,然后在这些点中,找到距离最近的两个点,以这两个点的距离作为校正点的点与点之间的距离;
[0035]
步骤4-2:然后根据这两个点的斜率,距离以及校正点的分布规律,求出未失真校正点应该在的位置;
[0036]
步骤5:根据失真校正点和未失真校正点的对应关系,利用最小二乘法函数,求出失真校正点与未失真校正点之间的转换关系;其中将理想不失真图像和失真图像之间的映射关系表示为:
[0037][0038]
其中:aj,bj为校正系数,a0和b0分别表示x和y方向的偏移,a1,b1,a2,b2表示像素的旋转,当j》2时,aj和bj没有明确的物理意义,用式(2)表示x方向或y方向校正系数的数量:其中n为多项式的阶数,n≥3;
[0039]
理想不失真校正参数si为:其中(xi,yi)为理想不失真图像上的一个点坐标,(pi,qi)为失真图像上对应的失真校正点坐标;
[0040]
假设失真图像上有k个标记点,由公式(1)得到2k个方程,并进一步获得超定线性方程组式(3):
[0041][0042]
式(3)的最小二乘解就是最优化的全局校正系数,利用全局校正系数,建立失真图像和理想非失真图像之间的映射关系,然后利用向后映射法重建出非失真图像;所述利用向后映射法重建出非失真图像具体为:
[0043]
循环失真图像上的每一个像素点,使用公式(4),公式(4)为二元三次多项式,其中ai,bi(i=0,1,2
…
9)为全局校正系数;根据全局校正系数和这个像素点的位置(x,y)计算该像素实际应该所在的位置(nx,ny),如果新位置(nx,ny)超出失真图像的范围,则对应未失真图像上位置(x,y)处的像素被置为0;反之,未失真图像上位置(x,y)处的像素被设置为失真图像上位置(nx,ny)处的像素;
[0044]
步骤6:根据步骤5求出的失真校正点与未失真校正点之间的转换关系,求出每一个失真像素实际所在的位置,从而实现校正整幅图像。
[0045]
本发明利用多项式拟合来逼近c臂投影失真,不仅可以避免复杂的几何建模过程,而且不用分步校正失真图像。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1