一种基于高斯模板匹配的红外点目标识别方法与流程
1.本发明属于信息感知与识别技术领域,具体涉及一种基于高斯模板匹配的红外点目标识别方法。
背景技术:
2.红外成像系统通过接收热辐射,将热信号转换为对应的电信号,电信号的大小对应了辐射能量的高低,电信号转换为图像输出后就得到了红外图像,红外成像主要受目标的灰度、目标材质、大气衰减等因素影响,在目标成像的同时,背景也同样经过成像系统成像,背景根据目标所处环境的不同,包括天空背景、地面背景以及海面背景等。
3.一个理想的点目标经过光学系统的衍射后能量被分散,最后成像在探测器上时,不再是一个孤零零的点,而是一个近似高斯分布的光斑,而其他背景往往不具备该特性。从而可根据该特性,将目标从背景中识别出来。
技术实现要素:
4.本发明解决的技术问题是:针对上述内容,本发明提出一种基于高斯模板匹配的红外点目标识别方法,该方法在天空中有云边缘和其他不满足高斯分布的干扰时效果较好。
5.本发明的技术方案是:一种基于高斯模板匹配的红外点目标识别方法,包括以下几个步骤:
6.步骤一:离线利用已知数据进行高斯拟合,得到相应的高斯参数;
7.步骤二:对拟合得到的高斯模板数字化和归一化;
8.步骤三:采用相关法进行匹配,将待匹配区域与归一化后的5个模板一一进行匹配,得到5个相应的匹配系数cov1
‑
cov5;
9.步骤四:根据匹配系数对当前区域进行目标识别。
10.所述步骤一的具体过程为:
11.选择5*5的标准模板,选取相应的图像序列,利用高斯拟合得到相应的高斯参数;二维高斯方程写成如下形式:
[0012][0013]
其中,g为高斯中心的灰度,(x0,y0)为高斯模板中心坐标,σ
x
和σ
y
分别为两个方向上的标准差,(x,y)为参与拟合的像素点的坐标,f(x,y)为对应(x,y)像素点的灰度,对方程两边取对数并乘以f整理得:
[0014][0015]
设参与拟合的像素点的个数为n,f代表对应该坐标的像素点的灰度,上述方程写成矩阵的形式:
[0016]
f=bc
[0017][0018][0019]
其中f为n*1的矩阵,b为n*5的矩阵,c为5*1的矩阵,利用最小二乘法可得:
[0020]
c=(b
t
b)
‑1b
t
f
[0021]
得到g,x0,y0,σ
x
,σ
y
五个参数的值即步骤一中的高斯参数,由于有5个参数,最少需要参与拟合的像素点个数n=5。
[0022]
所述步骤二的具体过程为:
[0023]
对5种不同的高斯模板进行数字化和归一化,得到数字化和归一化后的模板:
[0024]
a)高斯中心完全落在5*5模板的中心;
[0025]
b)高斯中心落在模板中心右下四个像素,分别包括:模板中
[0026]
心像素、模板中心水平向右像素、模板中心垂直向下像素以及模板中心对角线向下的像素;
[0027]
c)高斯中心落在模板中心左上四个像素,分别包括:模板中
[0028]
心像素、模板中心水平向左像素、模板中心垂直向上像素以及模板中心对角线向上的像素;
[0029]
d)高斯中心落在模板中心右上四个像素,分别包括:模板中
[0030]
心像素、模板中心水平向右像素、模板中心垂直向上像素以及模板中心对角线向上的像素;
[0031]
e)高斯中心落在模板中心左下四个像素,分别包括:模板中
[0032]
心像素、模板中心水平向左像素、模板中心垂直向上像素以及模板中心对角线向上的像素。
[0033]
所述步骤三的具体方法为:
[0034]
设模板为t,待匹配的图像区域为s,匹配就是将模板t覆盖在s上平移,模板匹配的相关系数如下所示,其中m=5,n=5:
[0035][0036]
其中,i=1,2,3,4,5。
[0037]
所述步骤四的具体过程为:
[0038]
若5个匹配系数,只要满足其中一个大于当前设定的阈值covt,则认为当前待匹配区域与模板匹配,判定其为目标;
[0039]
若cov1>cov2且cov1>cov3且cov1>cov4且cov1>cov5,则表明当前目标的高斯中心完全落在模板的中心;
[0040]
若cov2>cov1且cov2>cov3且cov2>cov4且cov2>cov5,则表明高斯中心落在模板中心的右下;
[0041]
若cov3>cov1且cov3>cov2且cov3>cov4且cov3>cov5,则表明高斯中心落在模板中心的左上;
[0042]
若cov4>cov1且cov4>cov2且cov4>cov3且cov4>cov5,则表明高斯中心落在模板中心的右上;
[0043]
若cov5>cov1且cov5>cov2且cov5>cov3且cov5>cov4,则表明高斯中心落在模板中心的左下;
[0044]
若5个匹配系数都不满足上述条件,则当前区域不为目标,并将其删除。
[0045]
本发明与现有技术相比的优点是:(1)现有技术一般采用在线拟合高斯模板,计算量大,无法满足工程应用中实时性的要求,本发明采用离线计算高斯模板的方式,减少了计算量;(2)现有技术一般只得到一个高斯中心落在模板中心的标准模板,本发明通过离散化和归一化后得到5个高斯模板,对于高斯中心偏离的情况也能得到有效识别;(3)本发明采用的高斯拟合能够剔除不满足高斯分布的干扰及云边缘。
附图说明
[0046]
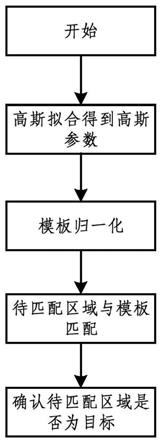
图1:本发明流程图;
[0047]
图2:本发明提出的高斯中心落在模板中心的标准模板;
[0048]
图3:本发明提出的高斯中心落在模板中心右下的标准模板;
[0049]
图4:本发明提出的高斯中心落在模板中心左上的标准模板;
[0050]
图5:本发明提出的高斯中心落在模板中心右上的标准模板;
[0051]
图6:本发明提出的高斯中心落在模板中心左下的标准模板;
具体实施方式
[0052]
本发明一种基于高斯模板匹配的红外点目标识别方法,如图1所示,具体包括以下几个步骤:
[0053]
步骤一:离线利用已知数据进行高斯拟合,得到相应的高斯参数;
[0054]
选择5*5的标准模板,选取相应的图像序列,利用高斯拟合得到标准模板。
[0055]
二维高斯方程可写成如下形式:
[0056][0057]
其中,g为高斯中心的灰度,x0,y0为高斯模板中心,σ
x
和σ
y
分别为两个方向上的标准差,(x,y)为参与拟合的像素点的坐标,f(x,y)为对应(x,y)像素点的灰度,对方程两边取对数并乘以f整理得:
[0058]
对方程两边取对数并乘以f整理得:
[0059][0060]
设参与拟合的像素点的个数为n,上述方程可以写成矩阵的形式:
[0061]
f=bc
[0062][0063][0064]
利用最小二乘法可得:
[0065]
c=(b
t
b)
‑1b
t
f
[0066]
可得到g,x0,y0,σ
x
,σ
y
五个参数的值即为高斯模板的参数。
[0067]
步骤二:对拟合得到的高斯模板数字化和归一化;
[0068]
对高斯模板进行数字化和归一化,得到数字化和归一化后的5种不同的模板:
[0069]
(1)高斯中心完全落在5*5模板的中心;
[0070]
(2)高斯中心落在模板中心右下四个像素,分别包括:模板中心像素、模板中心水
平向右像素、模板中心垂直向下像素以及模板中心对角线向下的像素。
[0071]
(3)高斯中心落在模板中心左上四个像素,分别包括:模板中心像素、模板中心水平向左像素、模板中心垂直向上像素以及模板中心对角线向上的像素。
[0072]
(4)高斯中心落在模板中心右上四个像素,分别包括:模板中心像素、模板中心水平向右像素、模板中心垂直向上像素以及模板中心对角线向上的像素。
[0073]
(5)高斯中心落在模板中心左下四个像素,分别包括:模板中心像素、模板中心水平向左像素、模板中心垂直向上像素以及模板中心对角线向上的像素。
[0074]
步骤三:采用相关法进行匹配,将待匹配区域与归一化后的5个模板一一进行匹配,得到5个相应的匹配系数cov1(高斯中心完全落在模板的中心),cov2(高斯中心落在模板中心的右下),cov3(高斯中心落在模板中心的左上),cov4(高斯中心落在模板中心的右上),cov5(高斯中心落在模板中心的左下);
[0075]
设模板为t,待匹配的图像区域为s,匹配就是将模板t覆盖在s上平移,模板匹配的相关系数如下所示,其中m=5,n=5:
[0076][0077]
其中,i=1,2,3,4,5。
[0078]
步骤四:根据匹配系数判断当前区域是否为目标;
[0079]
(1)当前区域为目标;
[0080]
若5个匹配系数,只要满足其中一个大于当前设定的阈值covt,则认为当前待匹配区域与模板匹配,判定其为目标;
[0081]
若cov1>cov2且cov1>cov3且cov1>cov4且cov1>cov5,则表明当前目标的高斯中心完全落在模板的中心;
[0082]
若cov2>cov1且cov2>cov3且cov2>cov4且cov2>cov5,则表明高斯中心落在模板中心的右下;
[0083]
若cov3>cov1且cov3>cov2且cov3>cov4且cov3>cov5,则表明高斯中心落在模板中心的左上;
[0084]
若cov4>cov1且cov4>cov2且cov4>cov3且cov4>cov5,则表明高斯中心落在模板中心的右上;
[0085]
若cov5>cov1且cov5>cov2且cov5>cov3且cov5>cov4,则表明高斯中心落在模板中心的左下;
[0086]
(2)当前区域不为目标;
[0087]
若5个匹配系数都不满足上述条件,则当前区域不为目标,将其删除。
[0088]
下面将结合附图和实施例对本发明作进一步的详细说明。
[0089]
本发明提出一种基于高斯模板匹配的红外点目标识别方法,如图1所示,具体包括以下几个步骤:
[0090]
步骤一:离线利用已知数据进行高斯拟合,得到相应的高斯参数;
[0091]
选择5*5的标准模板,选取相应的图像序列,利用高斯拟合得到标准模板。
[0092]
二维高斯方程可写成如下形式:
[0093][0094]
其中,g为高斯中心的灰度,x0,y0为高斯模板中心,σ
x
和σ
y
分别为两个方向上的标准差,(x,y)为参与拟合的像素点的坐标,f(x,y)为对应(x,y)像素点的灰度,对方程两边取对数并乘以f整理得:
[0095][0096]
设参与拟合的像素点的个数为n,上述方程可以写成矩阵的形式:
[0097]
f=bc
[0098][0099][0100]
利用最小二乘法可得:
[0101]
c=(b
t
b)
‑1b
t
f
[0102]
可得到g,x0,y0,σ
x
,σ
y
五个参数的值即为高斯模板参数。
[0103]
步骤二:对拟合得到的高斯模板数字化和归一化;
[0104]
对高斯模板进行数字化和归一化,得到数字化和归一化后的5种不同的模板:
[0105]
(1)高斯中心完全落在5*5模板的中心;
[0106]
(2)高斯中心落在模板中心右下四个像素,分别包括:模板中心像素、模板中心水平向右像素、模板中心垂直向下像素以及模板中心对角线向下的像素。
[0107]
(3)高斯中心落在模板中心左上四个像素,分别包括:模板中心像素、模板中心水平向左像素、模板中心垂直向上像素以及模板中心对角线向上的像素。
[0108]
(4)高斯中心落在模板中心右上四个像素,分别包括:模板中心像素、模板中心水
平向右像素、模板中心垂直向上像素以及模板中心对角线向上的像素。
[0109]
(5)高斯中心落在模板中心左下四个像素,分别包括:模板中心像素、模板中心水平向左像素、模板中心垂直向上像素以及模板中心对角线向上的像素。
[0110]
步骤三:采用相关法进行匹配,将待匹配区域与归一化后的5个模板一一进行匹配,得到5个相应的匹配系数cov1(高斯中心完全落在模板的中心),cov2(高斯中心落在模板中心的右下),cov3(高斯中心落在模板中心的左上),cov4(高斯中心落在模板中心的右上),cov5(高斯中心落在模板中心的左下);
[0111]
设模板为t,待匹配的图像区域为s,匹配就是将模板t覆盖在s上平移,模板匹配的相关系数计算方法如下所示,其中m=5,n=5:
[0112][0113]
其中,i=1,2,3,4,5。
[0114]
步骤四:根据匹配系数判断当前区域是否为目标;
[0115]
(1)当前区域为目标;
[0116]
若5个匹配系数,只要满足其中一个大于当前设定的阈值covt,则认为当前待匹配区域与模板匹配,判定其为目标;
[0117]
若cov1>cov2且cov1>cov3且cov1>cov4且cov1>cov5,则表明当前目标的高斯中心完全落在模板的中心;
[0118]
若cov2>cov1且cov2>cov3且cov2>cov4且cov2>cov5,则表明高斯中心落在模板中心的右下;
[0119]
若cov3>cov1且cov3>cov2且cov3>cov4且cov3>cov5,则表明高斯中心落在模板中心的左上;
[0120]
若cov4>cov1且cov4>cov2且cov4>cov3且cov4>cov5,则表明高斯中心落在模板中心的右上;
[0121]
若cov5>cov1且cov5>cov2且cov5>cov3且cov5>cov4,则表明高斯中心落在模板中心的左下;
[0122]
(2)当前区域不为目标;
[0123]
若5个匹配系数都不满足上述条件,则当前区域不为目标,将其删除。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1