致动器装置的制作方法
1.本发明涉及一种致动器装置。
背景技术:
2.专利文献1中公开了如下触觉提示装置,即,使得使用者将基于电场响应性高分子致动器的伸缩的振动等动作识别为触觉。上述触觉提示装置对施加于电场响应性高分子致动器的电压的波形进行变更,由此使得电场响应性高分子致动器的动作模式发生变化,对使用者提示与动作模式相应的各种触觉。
3.专利文献1:日本特表2014
‑
510346号公报
技术实现要素:
4.为了利用上述触觉提示装置对使用者提示特定的触觉,首先,需要以提示特定的触觉的方式创建用于使电场响应性高分子致动器执行动作的电压波形。例如,准备作为基础的电压波形,反复进行对该电压波形进行变更的编辑作业、以及利用编辑后的电压波形的电场响应性高分子致动器的动作试验,进行使得由电场响应性高分子致动器提示的触觉接近特定的触觉的作业,以该方式创建上述电压波形。上述电压波形的编辑作业是非常困难的作业,特别是在使多个电场响应性高分子致动器联动而提示特定的触觉的情况下,会对作业者造成的负担增大。
5.本发明的目的在于提供一种致动器装置,其能够容易地进行创建用于使多个电场响应性高分子致动器执行特定的动作的电压波形的作业。
6.解决上述问题的致动器装置具有:多个电场响应性高分子致动器,它们具有一对电极;驱动装置,其对多个所述电场响应性高分子致动器的所述一对电极之间施加基于分别与所述电场响应性高分子致动器对应的驱动波形信息而变化的电压;以及波形编辑装置,其对所述驱动波形信息进行编辑,所述波形编辑装置具有:图像处理部,其使显示部显示相位调整画面,该相位调整画面包含将基于与多个所述电场响应性高分子致动器分别对应的多个所述驱动波形信息的多个波形重叠得到的汇集图像;以及相位调整部,其基于使在所述相位调整画面显示的所述汇集图像的波形在时间轴方向上偏移的操作,对所述电场响应性高分子致动器的动作定时进行变更。
7.根据上述结构,能够凭直觉进行调整多个电场响应性高分子致动器的动作定时的作业,能够更简单且顺畅地进行使多个电压波形组合的复杂的编辑作业。因此,即使是机械、信息处理方面的知识欠缺的使用者,也能够容易地创建使多个电场响应性高分子致动器执行特定动作的电压波形。
8.在上述致动器装置中,优选地,所述驱动波形信息包含表示1个周期的电压变化的驱动波形数据,所述相位调整部基于使所述驱动波形数据的开始点的位置在时间轴方向上偏移的操作,对所述电场响应性高分子致动器的动作定时进行变更。
9.在上述致动器装置中,优选地,所述相位调整部基于将特定的所述驱动波形信息
的所述驱动波形数据的开始点作为基准点而使其他所述驱动波形信息的所述驱动波形数据的开始点的位置相对地在时间轴方向上偏移的操作,对所述电场响应性高分子致动器的动作定时进行变更。
10.在上述致动器装置中,优选地,在所述相位调整画面设置有使所述汇集图像的波形在时间轴方向上偏移的相位操作部。
11.在上述致动器装置中,优选地,用作使得使用者将基于所述电场响应性高分子致动器的伸缩的动作识别为触觉的触觉提示装置。
12.在上述致动器装置中,优选地,所述触觉提示装置是使得使用者将基于所述电场响应性高分子致动器的伸缩的振动识别为脉动的触觉的脉动发生装置。
13.发明的效果
14.根据本发明,能够容易地进行创建用于使多个电场响应性高分子致动器执行特定动作的电压波形的作业。
附图说明
15.图1是脉动发生装置的概略图。
16.图2是模拟体的剖面图。
17.图3是表示介电弹性体致动器的剖面构造的剖面图。
18.图4是脉动发生装置的框图。
19.图5是波形编辑画面的说明图。
20.图6是波形编辑画面的局部放大图。
21.图7是表示波形编辑装置侧的控制的流程图。
22.图8是表示波形编辑装置侧的控制的流程图。
23.图9是表示驱动装置侧的控制的流程图。
具体实施方式
24.下面,对将本发明的致动器装置具体设为使得使用者将根据施加电压而产生的振动识别为人体的脉动触觉的脉动发生装置的一个实施方式进行说明。
25.如图1及图2所示,脉动发生装置具有模拟人体的前臂以及手的外侧形状的由柔软材料构成的模拟体10。作为构成模拟体10的柔软材料,例如能举出硅酮、聚氨酯等弹性体。
26.在模拟体10的内部设置有:分别模拟人体的挠骨及尺骨的第1芯部11及第2芯部12;以及模拟挠骨动脉的3个片材状的介电弹性体致动器13(dea:dielectric elastomer actuator)。3个dea13是从手掌侧按顺序配置于诊脉的“寸”的位置的第1dea13a、配置于“关”的位置的第2dea13b、以及配置于“尺”的位置的第3dea13c,用于模拟“寸”、“关”、“尺”的各位置处的挠骨动脉的脉动。各dea13的构造相同。
27.如图3所示,dea13是由介电弹性体构成的片材状的介电层20、以及在介电层20的厚度方向的两侧配置的作为电极层的正极电极21和负极电极22层叠多层而成的多层构造体。绝缘层23层叠于dea13的最外层。如果对正极电极21与负极电极22之间施加直流电压,则dea13根据施加电压的大小而以在厚度方向上对介电层20进行压缩、且在沿着介电层20的面的方向即dea13的面方向上伸展的方式变形。
28.构成介电层20的介电弹性体并不特别限定,可以采用用于公知的dea的介电弹性体。作为上述介电弹性体,例如,能举出交联的聚轮烷、硅弹性体、丙烯酸弹性体、聚氨酯弹性体。可以使用上述介电弹性体中的一种,也可以同时使用多种。介电层20的厚度例如为20~200μm。
29.作为构成正极电极21及负极电极22的材料,例如,能够举出导电弹性体、碳纳米管、
“ケッチェンブラック
:ketjen black”(注册商标)、金属蒸镀膜。作为上述导电弹性体,例如能举出含有绝缘性高分子以及导电性填料的导电弹性体。
30.作为上述绝缘性高分子,例如能举出交联的聚轮烷、硅弹性体、丙烯酸弹性体、聚氨酯弹性体。可以利用上述绝缘性高分子中的一种,也可以同时使用多种。作为上述导电性填料,例如能举出
“ケッチェンブラック”
(注册商标)、炭黑、铜、银等金属粒子。可以利用上述导电性填料中的一种,也可以同时使用多种。正极电极21以及负极电极22的厚度例如为0.1~100μm。
31.构成绝缘层23的绝缘弹性体并不特别限定,可以采用用于公知的dea的绝缘部分的公知的绝缘弹性体。作为上述绝缘弹性体,例如能举出交联的聚轮烷、硅弹性体、丙烯酸弹性体、聚氨酯弹性体。可以使用上述绝缘弹性体中的一种,也可以同时使用多种。绝缘层23的厚度例如为1.0~100μm。
32.如图1及图4所示,脉动发生装置具有:驱动装置30,其对由各dea13的正极电极21以及负极电极22构成的一对电极之间施加周期性地变化的电压;以及波形编辑装置40,其对施加于各dea13的电压的波形进行编辑。
33.在驱动装置30设置有:用于驱动第1dea13a的第1驱动侧存储部31a及第1控制部31b;用于驱动第2dea13b的第2驱动侧存储部32a及第2控制部32b;以及用于驱动第3dea13c的第3驱动侧存储部33a及第3控制部33b。
34.在第1驱动侧存储部31a存储有从波形编辑装置40发送的第1驱动波形信息。第1驱动波形信息包含与表示施加于第1dea13a的1个周期的电压变化的波形相关的信息即第1驱动波形数据。第1控制部31b从电池等电源(省略图示)对第1dea13a反复施加基于第1驱动侧存储部31a中存储的第1驱动波形数据的波形的电压。
35.在第2驱动侧存储部32a存储有从波形编辑装置40发送的第2驱动波形信息。第2驱动波形信息包含:与表示施加于第2dea13b的1个周期的电压变化的波形相关的信息即第2驱动波形数据;以及与第2dea13b的动作定时相关的相位差信息即第2延迟时间。第2延迟时间是基于第1编辑波形数据的波形的开始点与基于第2编辑波形数据的波形的开始点之间的时间的偏差量。第2控制部32b在基于第2延迟时间的定时(timing)从电池等电源(省略图示)反复对第2dea13b施加基于第2驱动侧存储部32a中存储的第2驱动波形数据的波形的电压。
36.在第3驱动侧存储部33a存储有从波形编辑装置40发送的第3驱动波形信息。第3驱动波形信息包含:与表示施加于第3dea13c的1个周期的电压变化的波形相关的信息即第3驱动波形数据;以及与第3dea13c的动作定时相关的相位差信息即第3延迟时间。第3延迟时间是基于第1编辑波形数据的波形的开始点与基于第3编辑波形数据的波形的开始点之间的时间的偏差量。第3控制部33b在基于第3延迟时间的定时从电池等电源(省略图示)反复对第3dea13c施加基于第3驱动侧存储部33a中存储的第3驱动波形数据的波形的电压。
37.波形编辑装置40构成为具有作为输入部的指点设备41、显示部42、第1存储部43、第2存储部44、第3存储部45、波形编辑部46、相位调整部47、变更判定部48、条件设定部49、图像处理部50的计算机。
38.指点设备41例如是键盘、触摸面板、鼠标、游戏杆等指点设备,受理来自使用者的操作指示等。显示部42例如是液晶显示器、有机el显示器等显示设备。
39.如图5所示,在显示部42的上部对切换向各dea13的电压的施加的接通/断开的输出按钮51进行显示。在显示部42的左侧下部对用于调用登记完毕的波形图案的调用按钮52、用于登记新的波形图案的保存按钮53进行显示。波形图案是对特定的第1驱动波形信息、特定的第2驱动波形信息、特定的第3驱动波形信息以及后述的驱动条件进行组合而成的,是用于按照一定的规则使第1~第3dea13a~13c联动地执行动作的综合信息。
40.在显示部42的中央下部以及右侧下部对用于变更与第1驱动波形信息、第2驱动波形信息以及第3驱动波形信息对应的各波形的形状的波形编辑画面55进行显示。在波形编辑画面55对分别与第1驱动波形信息、第2驱动波形信息以及第3驱动波形信息对应的三种波形进行显示,并且对用于变更上述波形的各种按钮进行显示。
41.在波形编辑画面55的“寸”栏显示的波形是与第1驱动波形信息对应的波形,在“关”栏显示的波形是与第2驱动波形信息对应的波形,在“尺”栏显示的波形是与第3驱动波形信息对应的波形。各波形显示为由与1个周期的波形的起点、终点以及拐点相当的几个定位点p、以及将定位点p间连接的贝塞尔曲线构成的波形。另外,作为波形编辑画面55的各种按钮,例如能举出进行定位点p的追加以及删除等的定位点按钮、对每种波形的输出的大小(amp)、偏置电压的大小(offset)等进行调整的滚动条。
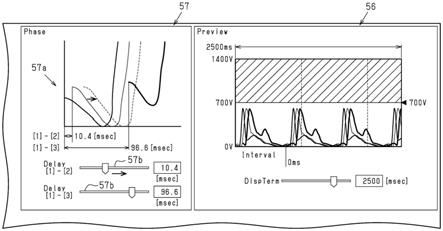
42.如图5及图6所示,在显示部42的右侧上部对重叠显示施加于第1~第3dea13a~13c的电压的三种波形的驱动状况画面56进行显示。
43.如图5及图6所示,在显示部42的中央上部对相位调整画面57进行显示,该相位调整画面57用于调整对构成一种个波形图案中包含的第2驱动波形信息以及第3驱动波形信息的第2延迟时间以及第3延迟时间进行调整的相位调整画面57进行显示。在相位调整画面57对如下显示汇集图像57a进行显示,即,该汇集图像57a是使对应于第2及第3驱动波形信息的波形的各开始点附近的一定范围与对应于第1驱动波形信息的波形的开始点附近的一定范围错开与第2及第3驱动波形信息对应的第2延迟时间及第3延迟时间而使对应于第2及第3驱动波形信息的波形的各开始点附近的一定范围与对应于第1驱动波形信息的波形的开始点附近的一定范围重叠得到的。另外,在相位调整画面57显示作为对第2延迟时间及第3延迟时间进行变更的相位操作部的滚动条57b。此外,在图5及图6中,“1.‑
[2]”表示第2延迟时间,“1.‑
[3]”表示第3延迟时间。
[0044]
如图5所示,在显示部42的左侧上部,显示用于统一设定波形图案的驱动条件的条件设定画面58。在条件设定画面58显示对各种驱动条件进行变更的滚动条。作为上述驱动条件,例如能举出输出的大小(amp)、偏置电压的大小(offset)、最大电压(max voltage)、在周期之间设置的等待时间的长短(interval)、1个周期的速度(beatcount)。
[0045]
使用者对指点设备41进行操作而变更在显示部42显示的各种按钮、波形编辑画面55以及相位调整画面57的显示内容,由此能够进行用于驱动第1~第3dea13a~13c的波形图案的编辑、以及对第1~第3dea13a~13c的动作进行变更。另外,对指点设备41进行操作
而变更条件设定画面58的显示内容,由此能够对波形图案的驱动条件进行变更。
[0046]
作为登记完毕的波形图案,在第1存储部43对平脉、滑脉等已知的脉动模式、以及使用者此前创建的脉动模式与调用按钮52建立关联地进行存储。此外,平脉是平常健康时的动脉的振动模式,滑脉是妊娠中等产生的动脉的振动模式。另外,使得已知的脉动模式再现的波形图案与命名为“平脉”等脉的名称的调用按钮52建立关联,使用者创建的波形图案与命名为“user”的名称的调用按钮52建立关联。
[0047]
在第2存储部44对即将发送至驱动装置30的第1~第3驱动波形信息(记作上次波形信息)以及第1~第3编辑波形信息进行存储。第1编辑波形信息是包含第1编辑波形数据的信息,第2编辑波形信息是包含第2编辑波形数据以及第2编辑延迟时间的信息,第3编辑波形信息是包含第3编辑波形数据以及第3编辑延迟时间的信息。后文中对第1~第3编辑波形数据以及第2~第3编辑延迟时间进行叙述。
[0048]
在第3存储部45对使波形编辑装置40以及驱动装置30执行后述的步骤s11~s13、s21~s26、s31~s34的各处理的程序进行存储。波形编辑装置40以及驱动装置30根据该程序而执行各步骤的处理。
[0049]
波形编辑部46创建以构成发送至驱动装置30的上次波形信息的第1~第3驱动波形数据为基础的1个周期的第1~第3编辑波形数据,并存储于第2存储部44。第1编辑波形数据是以第1驱动波形数据为基础的波形数据,第2编辑波形数据是以第2驱动波形数据为基础的波形数据,第3编辑波形数据是以第3驱动波形数据为基础的波形数据。波形编辑部46基于使用者的操作,对存储于第2存储部44的第1~第3编辑波形数据进行变更。另外,波形编辑部46在规定的定时将当前时刻的第1~第3编辑波形数据作为新的第1~第3驱动波形数据而发送至驱动装置30,并且对存储于第2存储部44的上次波形信息的第1~第3驱动波形数据进行更新。
[0050]
相位调整部47创建与构成发送至驱动装置30的上次波形信息的第2延迟时间以及第3延迟时间相同的第2编辑延迟时间以及第3编辑延迟时间,并存储于第2存储部44。相位调整部47基于使用者的操作而对存储于第2存储部44的第2编辑延迟时间以及第3编辑延迟时间进行变更。另外,相位调整部47在规定的定时将当前时刻的第2编辑延迟时间以及第3编辑延迟时间作为新的第2延迟时间以及第3延迟时间而发送至驱动装置30,并且对存储于第2存储部44的上次波形信息的第2延迟时间以及第3延迟时间进行更新。
[0051]
变更判定部48基于构成第2存储部44中存储的上次波形信息的第1驱动波形信息的第1驱动波形数据和当前时刻的第1编辑波形数据的比较,判定是否对第1编辑波形数据进行了变更。
[0052]
变更判定部48基于构成第2存储部44中存储的上次波形信息的第2驱动波形信息的第2驱动波形数据和当前时刻的第2编辑波形数据的比较,判定是否对第2编辑波形数据进行了变更。另外,变更判定部48基于构成第2存储部44中存储的上次波形信息的第2驱动波形信息的第2延迟时间和当前时刻的第2编辑延迟时间的比较,判定是否对第2编辑延迟时间进行了变更。
[0053]
变更判定部48基于构成第2存储部44中存储的上次波形信息的第3驱动波形信息的第3驱动波形数据和当前时刻的第3编辑波形数据的比较,判定是否对第3编辑波形数据进行了变更。另外,变更判定部48基于构成第2存储部44中存储的上次波形信息的第3驱动
波形信息的第3延迟时间和当前时刻的第3编辑延迟时间的比较,判定是否对第3编辑延迟时间进行了变更。
[0054]
条件设定部49基于使用者的操作而对驱动条件进行变更,并且将驱动条件发送至驱动装置30。
[0055]
图像处理部50创建表示与第1~第3编辑波形数据对应的波形的图像,并在显示部42的波形编辑画面55进行显示。图像处理部50创建汇集图像57a,并在显示部42的相位调整画面57进行显示。另外,图像处理部50创建使得施加于第1~第3dea13a~13c的电压的各波形重叠显示的图像,并在显示部42的驱动状况画面56进行显示。
[0056]
实施方式的各驱动波形数据以及各编辑波形数据包含与1个周期的波形具有的所有定位点p的坐标、将定位点p之间连接的贝塞尔曲线、输出的大小、偏置电压的大小、最大电压相关的信息,作为确定波形的参数。此外,相当于起点及终点的定位点p的值相同。
[0057]
下面,对利用波形编辑装置40执行的处理进行说明。波形编辑装置40在第1~第3dea13a~13c的驱动中的期间,以几毫秒~几十毫秒的周期分别反复执行图7及图8的各流程图所示的处理。
[0058]
图7的流程图所示的步骤s11~s13的处理,是与用于驱动第1dea13a的波形的编辑、以及用于驱动第1dea13a的第1驱动波形信息即第1驱动波形数据的发送相关的处理。
[0059]
作为步骤s11,基于构成第2存储部44中存储的上次波形信息的第1驱动波形信息的第1驱动波形数据和当前时刻的第1编辑波形数据的比较,判定是否对第1编辑波形数据进行了变更。在上述第1驱动波形数据和当前时刻的第1编辑波形数据不同的情况下,判定为对第1编辑波形数据进行了变更。基于波形数据中包含的上述参数是否全部都一致,判定第1驱动波形数据和第1编辑波形数据的不同。
[0060]
在步骤s11中,在判定为对第1编辑波形数据进行了变更的情况下(yes),作为步骤s12,波形编辑部46将当前时刻的第1编辑波形数据作为新的第1驱动波形数据而发送至驱动装置30。接下来,作为步骤s13,波形编辑部46对构成第2存储部44中存储的上次波形信息的第1驱动波形信息的第1驱动波形数据进行更新并结束处理。另外,在步骤s12中,在判定为未对第1编辑波形数据进行变更的情况下(no),结束处理。
[0061]
图8的流程图所示的步骤s21~s26的处理是与用于驱动第2dea13b的波形的编辑、以及用于驱动第2dea13b的第2驱动波形信息即第2驱动波形数据以及第2延迟时间的发送相关的处理。
[0062]
作为步骤s21,基于构成第2存储部44中存储的上次波形信息的第2驱动波形信息的第2驱动波形数据和当前时刻的第2编辑波形数据的比较,判定是否对第2编辑波形数据进行了变更。在上述第2驱动波形数据和当前时刻的第2编辑波形数据不同的情况下,判定为对第2编辑波形数据进行了变更。基于波形数据中包含的上述参数是否全部都一致,判定第2驱动波形数据和第2编辑波形数据的不同。
[0063]
在步骤s21中,在判定为对第2编辑波形数据进行了变更的情况下(yes),作为步骤s22,波形编辑部46将当前时刻的第2编辑波形数据作为新的第2驱动波形数据而发送至驱动装置30。接下来,作为步骤s23,波形编辑部46对构成第2存储部44中存储的上次波形信息的第2驱动波形信息的第2驱动波形数据进行更新并执行后续的步骤s24。另外,在步骤s21中,在判定未对第2编辑波形数据进行变更的情况下(no),执行s24。
[0064]
作为步骤s24,变更判定部48基于构成第2存储部44中存储的上次波形信息的第2驱动波形信息的第2延迟时间和当前时刻的第2编辑延迟时间的比较,判定是否对第2编辑延迟时间进行了变更。在上述第2延迟时间和当前时刻的第2编辑延迟时间不同的情况下,判定为对第2编辑延迟时间进行了变更。
[0065]
在步骤s24中,在判定为对第2编辑延迟时间进行了变更的情况下(yes),作为步骤s25,相位调整部47将当前时刻的第2编辑延迟时间作为新的第2延迟时间而发送至驱动装置30。接下来,作为步骤s26,相位调整部47对构成第2存储部44中存储的上次波形信息的第2驱动波形信息的第2延迟时间进行更新并结束处理。另外,在步骤s24中,在判定为未对第2编辑延迟时间进行变更的情况下(no),结束处理。
[0066]
另外,图8的流程图所示的步骤s21~26的处理是与用于驱动第3dea13c的波形的编辑、以及用于驱动第3dea13c的第3驱动波形信息即第3驱动波形数据以及第3延迟时间的发送相关的处理。本处理是将上述步骤s21~26的处理的说明中的第2驱动波形信息、第2驱动波形数据、第2编辑波形数据、第2延迟时间以及第2编辑延迟时间分别置换为第3驱动波形信息、第3驱动波形数据、第3编辑波形数据、第3延迟时间以及第3编辑延迟时间的处理,省略其详细的说明。此外,分别独立地执行用于驱动第2dea13b的步骤s21~26的处理、以及用于驱动第3dea13c的步骤s21~26的处理。
[0067]
接下来,对利用驱动装置30执行的处理进行说明。驱动装置30在第1控制部31b、第2控制部32b以及第3控制部33b中,分别以几毫秒~几十毫秒的周期反复执行图8所示的流程图的步骤s31~s34的处理。
[0068]
在利用第1控制部31b执行的步骤s31中,基于第1驱动侧存储部31a中存储的作为第1驱动波形信息的第1驱动波形数据、以及从波形编辑装置40的条件设定部49输入的驱动条件,对接下来应当施加的电压vn进行运算。接下来,作为步骤s32,对第1dea13a施加运算所得的电压vn。
[0069]
接下来,作为步骤s33,判定是否从波形编辑装置40的波形编辑部46新接收到第1驱动波形信息(第1驱动波形数据)。在步骤s33中,在新接收到第1驱动波形信息的情况下(yes),作为步骤s34,对存储于第1驱动侧存储部31a的第1驱动波形信息进行更新并结束处理。另外,在步骤s33中,在并未新接收到第1驱动波形信息的情况下(no),结束处理。
[0070]
在利用第2控制部32b执行的步骤s31中,基于第2驱动侧存储部32a中存储的作为第2驱动波形信息的第2驱动波形数据及第2延迟时间、以及从波形编辑装置40的条件设定部49输入的驱动条件,对接下来应当施加的电压vn进行运算。接下来,作为步骤s32,将运算所得的电压vn施加于第2dea13b。
[0071]
接下来,作为步骤s33,判定是否从波形编辑装置40的波形编辑部46新接收到第2驱动波形信息(第2驱动波形数据以及第2延迟时间的至少一者)。在步骤s33中,在新接收到第2驱动波形信息的情况下(yes),作为步骤s34,对存储于第2驱动侧存储部32a的第2驱动波形信息进行更新并结束处理。另外,在步骤s33中,在未新接收到第2驱动波形信息的情况下(no),结束处理。
[0072]
此外,在步骤s34中,在驱动1个周期的第2驱动波形信息的定时对新的第2驱动波形信息进行更新,由此能够对使用者无不协调感地提示触觉。
[0073]
利用第3控制部33b执行的步骤s31~s34的处理,是将利用上述第2控制部32b执行
的步骤s21~26的处理的说明中的第2驱动侧存储部32a、第2驱动波形信息、第2驱动波形数据、第2延迟时间、第2dea13b分别置换为第3驱动侧存储部33a、第3驱动波形信息、第3驱动波形数据、第3延迟时间、第3dea13c的处理,省略其详细的说明。
[0074]
接下来,对利用本实施方式的脉动发生装置创建用于以提示特定触觉的方式使第1~第3dea13a~13c执行动作的波形图案的方法进行说明。下面,列举对与平脉对应的登记完毕的波形图案进行编辑、且创建以提示更接近在实际的触诊时由熟悉触诊的人感受到的平脉的脉动模式的触觉的方式使第1~第3dea13a~13c执行动作的波形图案的情况为例进行说明。
[0075]
首先,作为准备工序,以在基于与平脉对应的登记完毕的波形图案的脉动模式下使模拟体10执行动作的方式对第1~第3dea13a~13c进行驱动。
[0076]
详细而言,在输出按钮51断开的状态、即未从驱动装置30对第1~第3dea13a~13c施加电压而未驱动第1~第3dea13a~13c的驱动停止时,对指点设备41进行操作而点击与平脉对应的调用按钮52。由此,在波形编辑装置40中,将与平脉对应的登记完毕的第1~第3驱动波形信息发送至驱动装置30,并且对存储于第2存储部44的上次波形信息进行更新。而且,在驱动装置30中,利用从波形编辑装置40发送的第1~第3驱动波形信息,对存储于第1~第3驱动侧存储部31a~33a的第1~第3驱动波形信息进行更新。
[0077]
此时,利用波形编辑装置40的波形编辑部46重新创建复制了与平脉对应的登记完毕的波形图案的各电压波形数据的第1~第3编辑波形数据,并且对存储于第2存储部44的第1~第3编辑波形数据进行更新。而且,利用图像处理部50创建表示第1~第3编辑波形数据的波形的图像,在显示部42的波形编辑画面55对该图像进行显示。
[0078]
另外,利用波形编辑装置40的相位调整部47重新创建与对应于平脉的登记完毕的波形图案的第2延迟时间以及第3延迟时间相同的第2编辑延迟时间以及第3编辑延迟时间,并且对存储于第2存储部44的第2编辑延迟时间以及第3编辑延迟时间进行更新。而且,利用图像处理部50创建汇集图像57a,在显示部42的相位调整画面57对该图像进行显示。同时,将在相位调整画面57显示的各滚动条57b的位置调整为对应于平脉的登记完毕的波形图案的第2延迟时间以及第3延迟时间的值。另外,将在条件设定画面58显示的各滚动条的位置调整为对应于平脉的登记完毕的波形图案的值。
[0079]
然后,如果对指点设备41进行操作而使得输出按钮51处于接通状态,则在驱动装置30反复执行图9的流程图的处理。由此,将基于第1~第3驱动侧存储部31a~33a中存储的第1~第3驱动波形信息而变化的电压施加于第1~第3dea13a~13c,使得第1~第3dea13a~13c执行动作。另外,在波形编辑装置40反复执行图7~图8的流程图的处理。
[0080]
下面,作为编辑工序,将熟悉诊脉的人作为使用者而进行波形的编辑。在编辑工序中,使用者一边用单手触摸模拟体10而感受基于第1~第3dea13a~13c的动作从模拟体10提示的脉动,一边用另一只手对指点设备41进行操作而进行波形的编辑。
[0081]
在对波形的形状进行变更的情况下,使用者对指点设备41进行操作而使得在波形编辑画面55显示的波形的图像中示出的定位点p移动、以及进行定位点p的追加或删除,由此对在波形编辑画面55显示的波形的形状进行变更。例如,通过利用使在波形编辑画面55显示的指针位于目标定位点p而进行拖曳、或者在选择了目标定位点p的状态下对键盘的箭头键进行操作等的指点设备的常用操作,能够实现定位点p的移动。由贝塞尔曲线自动地对
定位点p之间进行补充。
[0082]
在对波形的相位进行变更的情况下,使用者对指点设备41进行操作而变更与在相位调整画面57显示的第2编辑延迟时间以及第3编辑延迟时间对应的各滚动条的位置。如图6的箭头所示,如果对与第2编辑延迟时间对应的滚动条的位置进行变更,则使得基于第2编辑波形数据的波形在时间轴方向(横轴方向)上偏移,以使基于在相位调整画面57显示的第1编辑波形数据的波形的开始点、和基于第2编辑波形数据的波形的开始点之间的时间间隔变为与滚动条的位置对应的第2编辑延迟时间。在对与第3延迟时间对应的滚动条的位置进行了变更的情况下也一样,使得基于第3编辑波形数据的波形在时间轴方向(横轴方向)上偏移。
[0083]
在对驱动条件进行变更的情况下,使用者对指点设备41进行操作而变更在条件设定画面58显示的各滚动条的位置。另外,在要恢复为与登记完毕的平脉对应的波形图案的情况下、要以其他登记完毕的波形图案为基础的情况等下,对与作为目标的登记完毕的波形图案对应的调用按钮52进行点击,由此变更波形编辑画面55、相位调整画面57以及条件设定画面58的显示内容。
[0084]
如果基于使用者的操作,对波形编辑画面55、相位调整画面57以及条件设定画面58的各画面的显示内容进行变更,则由波形编辑部46以及相位调整部47将存储于第2存储部44的第1~第3编辑波形信息(第1~第3编辑波形数据以及第2~第3编辑延迟时间)变更为基于当前时刻的各画面的显示内容的信息。
[0085]
这里,如图7及图8的流程图所示,在第1~第3dea13a~13c的驱动过程中,作为步骤s11、s21、s24,波形编辑装置40定期地执行判定是否对第1~第3编辑波形信息进行了变更的处理。如果对第1~第3编辑波形信息进行变更,则在此次周期或下次周期的步骤s11、s21、s24中,判定为对第1~第3编辑波形信息进行了变更,将当前时刻的第1~第3编辑波形信息发送至驱动装置30。
[0086]
另外,如图9的流程图所示,在第1~第3dea13a~13c的驱动过程中,作为步骤s33,驱动装置30定期地执行判定是否从波形编辑装置40新接收到第1~第3驱动波形信息(第1~第3驱动波形数据以及第2~第3延迟时间)的处理。因此,如果新接收到第1~第3驱动波形信息,则在此次周期或下次周期的步骤s33中,判定为新接收到第1~第3驱动波形信息,将存储于第1~第3驱动侧存储部31a~33a的第1~第3驱动波形信息更新为新接收到的第1~第3驱动波形信息。
[0087]
而且,在下次周期或下下次周期的步骤s31~s32中,基于新接收到的第1~第3驱动波形信息,对接下来应当施加的电压vn进行运算,将运算所得的电压vn施加于第1~第3dea13a~13c。由此,将第1~第3dea13a~13c的动作变更为基于新接收到的第1~第3驱动波形信息,即,使用者编辑的第1~第3编辑波形信息的动作。
[0088]
以几毫秒~几十毫秒的周期反复执行图7~图9的各流程图所示的处理。因此,在使用者刚刚进行了对波形编辑画面55以及相位调整画面57的显示内容进行变更的操作之后,将第1~第3dea13a~13c的动作切换为反映出变更的动作,传递至触摸模拟体10的使用者的手的脉动的振动模式发生变化。
[0089]
另外,如图7及图8的流程图所示,如果在步骤s12、s22、s25中将当前时刻的第1~第3编辑波形信息作为新的第1~第3驱动波形信息而发送至驱动装置30,则在步骤s13、
s23、s26中对存储于第2存储部44的上次波形信息进行更新,在其下次周期的步骤s11中,进行基于更新后的上次波形信息的判定。
[0090]
使用者以使得从模拟体10传递至单手的脉动的振动模式接近基于自身经验的平脉的振动模式的方式,用另一只手对指点设备41进行操作。此时,每当进行对波形编辑画面55以及相位调整画面57的显示内容进行变更的操作时,从模拟体10传递的脉动的振动模式都发生变化。而且,在从模拟体10传递的脉动的振动模式与基于自身经验的平脉的振动模式一致时,对保存按钮53进行点击,将与平脉对应的登记完毕的波形图案更新为由当前时刻的第1~第3编辑波形信息构成的波形图案,或者将由当前时刻的第1~第3编辑波形信息构成的波形图案作为使用者创建的波形图案而重新登记。由此,能够获得用于以提示更接近在实际的触诊时由熟悉触诊的人感受到的平脉的脉动模式的触觉的方式使第1~第3dea13a~13c执行动作的电压波形。
[0091]
下面,对本实施方式的效果进行记述。
[0092]
(1)脉动发生装置具有:第1~第3dea13a~13c;驱动装置30,其对第1~第3dea13a~13c施加基于与第1~第3dea13a~13c分别对应的第1~第3驱动波形信息而变化的电压;以及波形编辑装置40,其对第1~第3驱动波形信息进行编辑。波形编辑装置40具有:图像处理部50,其使显示部42对包含将基于第1~第3驱动波形信息的多个波形重叠得到的汇集图像57a在内的相位调整画面57进行显示;以及相位调整部47,其基于使汇集图像57a的波形在时间轴方向上偏移的操作而对第2~第3dea13b~13c的动作定时进行变更。
[0093]
根据上述结构,能够凭直觉进行调整第2~第3dea13b~13c的动作定时的作业,能够更简单且顺畅地进行对多个电压波形进行组合的复杂的编辑作业。因此,即使是机械、信息处理方面的知识欠缺的使用者,也能够容易地创建用于使多个dea执行特定动作的电压波形。由此,能够更顺畅地进行一边对电压波形进行编辑、一边检索用于使多个dea联动地执行特定动作的波形图案的作业。
[0094]
(2)驱动波形信息包含表示1个周期的电压变化的驱动波形数据。相位调整部47基于使驱动波形数据的开始点的位置在时间轴方向上偏移的操作而对第2~第3dea13b~13c的动作定时进行变更。
[0095]
根据上述结构,能够进一步凭直觉进行调整第2~第3dea13b~13c的动作定时的作业。
[0096]
(2)相位调整部47基于将第1驱动波形信息的第1驱动波形数据的开始点作为基准点而使第2~第3驱动波形信息的第2~第3驱动波形数据的开始点的位置相对地在时间轴方向上偏移的操作,对第2~第3dea13b~13c的动作定时进行变更。
[0097]
根据上述结构,能够进一步凭直觉进行调整第2~第3dea13b~13c的动作定时的作业。
[0098]
(3)在相位调整画面57设置有作为用于使汇集图像57a的波形在时间轴方向上偏移的相位操作部的滚动条57b。
[0099]
根据上述结构,能够更简单地进行调整第2~第3dea13b~13c的动作定时的作业。
[0100]
(4)波形编辑装置40在dea13的驱动过程中对第1~第3编辑波形信息进行变更时,以将第1~第3编辑波形信息作为新的第1~第3驱动波形信息的方式对第1~第3驱动波形信息进行更新,基于更新后的第1~第3驱动波形信息而对第1~第3dea13a~13c进行驱动。
[0101]
根据上述结构,在第1~第3dea13a~13c的驱动过程中对第1~第3编辑波形信息进行了变更的情况下,即使不进行变更后的第1~第3编辑波形信息的保存、发送等操作,也将第1~第3dea13a~13c的动作切换为基于变更后的第1~第3编辑波形信息的动作。由此,能够更顺畅地进行一边对第1~第3编辑波形信息进行编辑、一边检索使第1~第3dea13a~13c执行特定动作的电压波形的作业。
[0102]
此外,可以以下述方式变更实施本实施方式。可以在技术上不矛盾的范围内相互组合实施本实施方式以及下面的变更例。
[0103]
·
使汇集图像57a的波形在时间轴方向上偏移的相位操作部并不限定于滚动条57b。相位操作部例如可以是使波形向前方或后方偏移的按钮,也可以输入各延迟时间的数值的操作部。另外,可以形成为如下结构,即,通过利用通过拖曳而使汇集图像57a的任意波形移动、或者在选择了任意波形的状态下对键盘的箭头键进行操作等的指点设备41的操作,对各延迟时间进行调整。在该情况下,也可以省略相位操作部。
[0104]
·
在上述实施方式中,形成为如下结构,即,相对于用于驱动第1dea13a的电压波形,使用于驱动第2~第3dea13b~13c的电压波形在相对滞后的方向上偏移,但也可以构成为使得用于驱动第2~第3dea13b~13c的电压波形在相对提前的方向上偏移。
[0105]
·
在上述实施方式中,构成为能够以表示1个周期的电压变化的波形的开始点为基准点而使各波形偏移,但是,例如也可以构成为能够将波峰的升高点、波峰的顶点等除了开始点以外的点作为基准点而使各波形偏移。
[0106]
·
在上述实施方式中构成为,在汇集图像57a显示的三个波形中,将一个波形(与第1驱动波形数据对应的波形)固定,使得除此以外的波形(与第2~第3驱动波形数据对应的波形)能够在时间轴方向上相对地偏移,但也可以构成为使得所有波形都能够在时间轴方向上偏移。即,时间轴方向上的波形的偏移可以是将一个波形作为基准的相对的偏移,也可以是将时间轴作为基准的绝对的偏移。
[0107]
·
可以将驱动状况画面用作汇集图像57a。
[0108]
·
在上述实施方式中,从波形编辑装置40向驱动装置30发送各驱动波形数据以及各延迟时间,在驱动装置30侧进行反映出各延迟时间的处理,但也可以构成为,在波形编辑装置40侧针对驱动波形数据而创建反映出各自的延迟时间的合成驱动波形数据,将合成驱动波形数据向驱动装置30侧发送。在该情况下,驱动装置30可以仅施加基于合成驱动波形数据的波形的电压,可以将用于反映延迟时间的结构从驱动装置30省略。
[0109]
·
确定各驱动波形数据以及各编辑波形数据的波形的参数并不限定于上述实施方式。例如,可以省略上述实施方式的参数的一部分,也可以追加其他参数。可以将延迟时间等相位差信息设为确定波形的参数之一。
[0110]
·
指点设备41以及显示部42可以是不同于本发明的致动器装置而准备的外部仪器。
[0111]
·
设置于模拟体10的dea13的数量可以是2个,也可以大于或等于4个。
[0112]
·
可以代替dea13而使用离子更换汇集物金属复合体(ipmc:ionic polymer metal composite)等其他电场响应性高分子致动器(ep a:electroactive polymer actuator)。
[0113]
本发明的致动器装置可以用作,将根据施加电压而产生的振动等动作作为触觉而
使得使用者辨别的除了脉动发生装置以外的触觉提示装置。另外,本发明的致动器装置并不局限于触觉提示装置,可以应用于通过使施加电压变化而使得多个电场响应性高分子致动器执行特定动作的所有装置。
[0114]
·
构成致动器装置的dea13等电场响应性高分子致动器、驱动装置30、以及波形编辑装置40中的一部分或者全部可以构成为一体。例如,电场响应性高分子致动器和驱动装置30可以构成为一体,驱动装置30和波形编辑装置40可以构成为一体,电场响应性高分子致动器、驱动装置30以及波形编辑装置40可以构成为一体。
[0115]
标号的说明
[0116]
30
…
驱动装置
[0117]
40
…
波形编辑装置
[0118]
42
…
显示部
[0119]
47
…
相位调整部
[0120]
50
…
图像处理部
[0121]
57
…
相位调整画面
[0122]
57a
…
汇集图像
[0123]
57b
…
滚动条
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1