一种船舶目标检测方法及系统
1.本发明属于目标检测技术领域,尤其涉及一种船舶目标检测方法及系统。
背景技术:
2.目标检测是计算机视觉领域重要的研究方向之一,其在智能视频监控、医学图像分析、行为理解、视觉导航等方面有着广泛的应用。目前国内外学者主要关注的问题集中在相似目标干扰、目标尺度变化、外观模糊、遮挡以及实际应用中目标检测系统实时性等情况下的检测鲁棒性、准确性提高上。
3.近年来,基于深度学习的目标检测方法备受关注,由于其卓越的特征描述能力、鲁棒的检测性能,正逐渐成为当前目标检测的主流。ren s q等在ieee transactions on pattern analysis and machine intelligence(2017,39(6):1137
‑
1149)上发表的文章“faster r
‑
cnn:towards real
‑
time object detection with region proposal networks”中,提出基于two
‑
stage的目标检测方法,通过rpn(region proposal networks)模块,筛选出图像中的roi(region of interests),极大提高了目标检测的准确率;然而,该方法耗时较高,难以满足实际检测系统的实时性需求。
技术实现要素:
4.针对现有技术存在的问题,本发明提供了一种船舶目标检测方法,能够提高船舶目标的检测速度。
5.本发明提供如下技术方案:
6.第一方面,提供了一种船舶目标检测方法,包括:
7.将船舶目标图像数据标注后制作成训练样本集;
8.构建基于yolo v3的轻量化的特征提取主干网络;
9.根据特征提取主干网络建立基于yolo v3改进的船舶目标检测网络模型;
10.利用训练样本集对船舶目标检测网络模型进行训练;
11.通过训练好的船舶目标检测网络模型对待检测的船舶图像数据进行检测。
12.结合第一方面,进一步的,所述特征提取主干网络包括p个cblm单元和q个cbl单元组成;其中cbml单元由一个cbl单元和一个最大池化层构成;cbl单元由二维卷积、批归一化和非线性激活函数构成。
13.结合第一方面,进一步的,船舶目标检测网络模型的预测结构具体为:
14.采用特征金字塔结构实现s1×
s1和s2×
s2两个尺度特征图的预测输出,其中第一个尺度为原图像的n1倍降采样输出,第二个尺度融合了原图像的倍降采样输出与n1倍降采样输出得到。
15.结合第一方面,进一步的,通过对训练样本集中船舶目标候选框尺度进行聚类分析以确定船舶目标检测网络模型所需的目标候选框先验尺度参数。
16.结合第一方面,进一步的,聚类分析的目标函数f为:
[0017][0018]
其中,b
v
表示第v个样本,c
u
表示第u个边界框簇中心宽高尺度;n为样本的总个数;k为簇的总个数;iou(b
v
,c
u
)表示样本宽高尺度与边界框簇中心宽高尺度的交并比。
[0019]
结合第一方面,进一步的,船舶目标检测网络模型的损失函数如下式所示:
[0020][0021]
其中,分别为yolo v3模型在s1×
s1和s2×
s2两个尺度上进行船舶目标检测的损失函数,l
total
为船舶目标检测网络模型的损失函数。
[0022]
第二方面,提供了一种船舶目标检测系统,包括:
[0023]
图像标注模块,用于将船舶目标图像数据标注后制作成训练样本集;
[0024]
模型建立模块:用于构建基于yolo v3轻量化的特征提取主干网络;
[0025]
根据特征提取主干网络建立基于yolo v3改进的船舶目标检测网络模型;
[0026]
模型训练模块,利用训练样本集对船舶目标检测网络模型进行训练;
[0027]
目标检测模块,用于通过训练好的船舶目标检测网络模型对待检测的船舶图像数据进行检测。
[0028]
有益效果:本发明在yolo v3的目标检测框架上,对原算法进行改进,重新设计轻量化特征提取主干网络,利用iou k
‑
means聚类算法重新对目标框维度尺度进行聚类分析,提高输入图像尺度,在保证检测精度的前提下进一步提高目标的检测速度:
[0029]
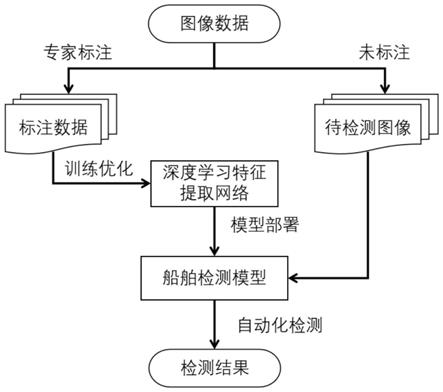
1)首先获取船舶目标图像数据,通过专家标注得到下一阶段模型所需的训练样本数据,针对船舶目标检测,通过对特征提取骨干网络及多尺度预测结构进行精简设计,以提高目标检测速度;
[0030]
2)利用iou k
‑
means聚类算法,对训练样本进行维度聚类分析,得到一组宽高固定的先验边界框尺度,以保证目标检测的准确性;
附图说明
[0031]
图1为本发明的实施例流程图;
[0032]
图2为本发明中船舶目标检测网络模型的结构图;
[0033]
图3为本发明中训练过程中平均检测精度变化图;
[0034]
图4a1为本发明中拥挤场景中目标互遮挡情况下yolo v3的检测图;
[0035]
图4a2为本发明中拥挤场景中目标互遮挡情况下slight
‑
yolo v3的检测图;
[0036]
图4b1为本发明中夜晚低照度条件下yolo v3的检测图;
[0037]
图4b2为本发明中夜晚低照度条件下slight
‑
yolo v3的检测图;
[0038]
图4c1为本发明中针对不同尺度目标混杂环境下的小目标yolo v3的检测图;
[0039]
图4c2为本发明中针对不同尺度目标混杂环境下的小目标slight
‑
yolo v3的检测图。
取值20,s2取值40,所以最终的损失函数l
total
为:
[0052][0053]
边界框定位损失l
x,y
具体为:
[0054][0055]
其中,s2表示输入图像被划分成的网格数;b表示单个网格预测边界框数,取值为3;表示第i个网格预测得到的第j个边界框是否为目标,若是目标则取值1,反之取值0;x
i
和y
i
分别表示预测边界框中心横坐标和纵坐标;和分别表示实际边界框中心横坐标和纵坐标。
[0056]
边界框尺度损失l
w,h
具体为:
[0057][0058]
其中,w
i
和h
i
分别表示预测边界框宽度和高度;和分别表示实际边界框宽度和高度。
[0059]
置信度损失l
conf
具体为:
[0060][0061]
其中,λ
obj
表示包含目标的边界框的权重系数,取值为1;λ
nobj
表示不包含目标的边界框的权重系数,取值为100。较大的权重可以使不包含目标的边界框产生较大的损失值,以产生较大的模型误差;和c
i
分别表示实际目标和预测目标的置信度。
[0062]
类别损失l
cls
具体为:
[0063][0064]
其中,c表示检测到的目标所属的类别;和p
i
(c)分别表示第i个网格检测到某个目标时,该目标属于类别c的实际概率和预测概率。
[0065]
步骤四、利用训练样本集对建立的船舶目标检测模型进行优化与训练。
[0066]
步骤五、将训练后的模型进行部署,输入待检测船舶的图像数据,实现船舶目标的自动化检测。
[0067]
实施例2
[0068]
本发明还提供了一种船舶目标检测系统,包括:
[0069]
图像标注模块,用于将船舶目标图像数据标注后制作成训练样本集;
[0070]
模型建立模块:用于构建基于yolo v3轻量化的特征提取主干网络;
[0071]
根据特征提取主干网络建立基于yolo v3改进的船舶目标检测网络模型;
[0072]
模型训练模块,利用训练样本集对船舶目标检测网络模型进行训练;
[0073]
目标检测模块,用于通过训练好的船舶目标检测网络模型对待检测的船舶图像数据进行检测。
[0074]
通过本发明改进后性能对照如表1所示;其中baseline表示为原yolo v3模型,训练图像尺度为416
×
416,未使用iou k
‑
means聚类;yolo v3表示为训练图像尺度为640
×
640,使用iou k
‑
means聚类;slight
‑
yolo v3表示为本发明模型,训练图片尺度为640
×
640,使用iou k
‑
means聚类;使用精度(precision)、召回率(recall)、f1值、平均精度均值(map)评价模型的性能,用每秒帧数(frame per second,fps)来衡量模型的检测速度。
[0075]
表1
[0076][0077]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1