一种基于流域分析技术的肺叶自动分段方法与流程
1.本发明涉及医学图像处理技术领域,具体涉及一种基于流域分析技术的肺叶自动分段方法。
背景技术:
2.随着低剂量螺旋ct(low
‑
dose computed tomography,ldct)扫描检查的普及,愈来愈多的肺部结节被检出。由于存在一定的恶性概率,因此肺部结节的诊断和治疗,已经成为临床医生关注的重点。
3.随着肺癌早筛的推广,肺癌疾病谱悄然发生着变化,以磨玻璃成分为主型的早期肺癌已成为新的疾病负担。随着jcog0804临床试验结果的揭晓,我们知道:对于不超过2cm、磨玻璃成分为主(ggo
‑
predominant)的外周型肺结节,在保证足够切缘的情况下(研究定义至少5mm),亚肺叶切除有接近100%5年无复发生存率,且并发症发生率低、对肺功能影响小,应当推荐首选手术方式。值得注意的是,研究中楔形切除占八成以上,研究并不要求楔形切除术必须做淋巴结活检,除非遇到明显异常的淋巴结。可见对于外周型磨玻璃成分为主小肺癌,楔形切除在保证切缘的前提下一样可以达到100%的五年无复发生存。
4.然而,楔形切除成功的前提是精准的定位。既往研究中报道了多种外周肺结节定位方法,主要包括ct引导下经皮穿刺定位(hookwire定位,弹簧圈定位,美蓝、吲哚菁绿等液体材料定位),电磁导航支气管镜下穿刺定位等。每一肺段支气管及其分支分布的肺组织称为支气管肺段,在肺段内,肺动脉的分支与肺段支气管相伴行,支气管与动脉在三维空间的走向决定着各个肺段位置。因此,实现肺部图像自动分段,对肺结节切除研究具有重要现实意义和应用价值。
技术实现要素:
5.鉴于以上问题,本发明提出一种基于流域分析技术的肺叶自动分段方法,用以解决现有的肺结节定位方法对于特殊位置的肺结节定位困难的问题。
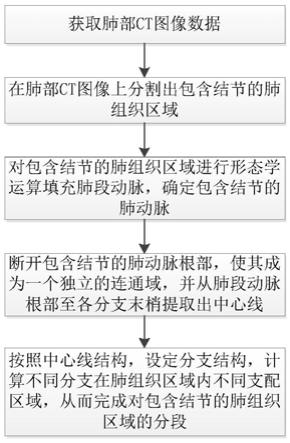
6.一种基于流域分析技术的肺叶自动分段方法,其特征在于,包括下述步骤:
7.步骤一、获取肺部ct图像数据;
8.步骤二、在肺部ct图像上分割出包含结节的肺组织区域;
9.步骤三、对包含结节的肺组织区域进行形态学运算填充肺段动脉,确定包含结节的肺动脉;
10.步骤四、断开包含结节的肺动脉根部,使其成为一个独立的连通域,并从肺段动脉根部至各分支末梢提取出中心线;
11.步骤五、按照所述中心线结构,设定分支结构,计算不同分支在肺组织区域内不同支配区域,从而完成对包含结节的肺组织区域的分段。
12.进一步地,步骤二的具体步骤包括:
13.步骤二一、首先对ct图像数据统计直方图,得到一个初始分割阈值,在满足初始分
割阈值的区域选取种子点,以该种子点为起点,利用3d区域生长提取出肺组织;
14.步骤二二、然后引入连通域方法来剔除气管,随后判断左右肺是否粘连,如果粘连,则剔除粘连区域,得到两个互不相连的区域;
15.步骤二三、最后,把两个互不相连的区域分别标记为左肺和右肺组织。
16.进一步地,步骤四中通过腐蚀肺组织边缘的肺动脉来断开肺动脉的根部。
17.进一步地,步骤四中采用消去法提取中心线。
18.进一步地,步骤四中采用消去法提取中心线的过程为:把三维体素点分为两类,所有肺血管像素点分为一类,即目标点;所有背景像素点分为一类,即背景点;如果目标点同时满足四个条件,则该目标点便可以消去为背景点。
19.进一步地,步骤四中所述四个条件为:该点是目标点且26邻域中存在至少两个别的目标点;该点26邻域内存在背景点;该点26邻域中除该点外,其他任意两个目标点都可以通过6邻接目标点到达对方,即只有一个6邻接连通域;该点26邻域中的任意两个背景点也可以通过6邻接背景点到达对方,即背景点只有一个6邻接连通域。
20.进一步地,步骤五的具体步骤包括:
21.步骤五一、在包含结节和肺动脉的肺组织区域内部选取多个血管根部进行标记,从而设定多个血管分支,所述血管分支作为种子点,即多个血管分支对应多个种子点;
22.步骤五二、多个血管分支中每个种子点按照恒定速率向周围膨胀生长;
23.步骤五三、每个种子点达到生长停止条件时停止生长扩充,直到所有种子点停止生长即完成分段,各个种子点的膨胀边界构成了所述肺组织区域的流域范围。
24.进一步地,步骤五二中每个种子点采用26邻域区域做等距球形膨胀生长,且其生长准则为:邻域点与种子点的欧式距离小于等于且所述邻域点本身不是种子点,则将该邻域点合并到该种子点对应的待分段区域。
25.进一步地,步骤五三中所述生长停止条件为当生长区域到达肺边界或是斜裂、水平裂。
26.进一步地,步骤五三中所述生长停止条件为两个生长区域相接。
27.本发明的有益技术效果是:
28.本发明一种基于流域分析技术的肺叶自动分段方法能够在无创伤的前提下,准确地对包含肺结节的肺叶进行分段,从而对肺结节所在位置进行精准定位,且定位时间短,从而使得胸腔镜下肺结节楔形切除术更加精准、安全。
附图说明
29.本发明可以通过参考下文中结合附图所给出的描述而得到更好的理解,其中在所有附图中使用了相同或相似的附图标记来表示相同或者相似的部件。所述附图连同下面的详细说明一起包含在本说明书中并且形成本说明书的一部分,而且用来进一步举例说明本发明的优选实施例和解释本发明的原理和优点。
30.图1示出了本发明一种基于流域分析技术的肺叶自动分段方法的示意性流程图;
31.图2示出了本发明一种基于流域分析技术的肺叶自动分段方法中流域分析的示意性流程图;
32.图3示出了本发明一种基于流域分析技术的肺叶自动分段方法中流域分析定位原
理示意图。
具体实施方式
33.在下文中将结合附图对本发明的示范性实施例进行描述。为了清楚和简明起见,在说明书中并未描述实际实施方式的所有特征。为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与根据本发明的方案密切相关的装置结构和/或处理步骤,而省略了与本发明关系不大的其他细节。
34.ct是利用精确准直的x线束与灵敏度极高的探测器一同围绕人体的某一部位作一个接一个的断面扫描,其具有扫描时间快、图像清晰等特点,可用于多种疾病的检查。近年来越来越多的患者因体检发现肺内结节就诊,随着肺部筛查的普及,亚肺叶切除成为2cm以下以磨砂玻璃样为主要成分肺部结节的重要微创手术方式(jcog 0804),ct引导下定位是目前主要的术前定位方式,但仍存在部分盲区,并且占用影像和ct室时间空间资源;且现有的定位方法不能准确定位特殊位置的肺结节。
35.因此,本发明提出一种基于流域分析技术的肺叶自动分段方法,能够在无创伤的前提下,直观、准确定位肺结节,尤其是特殊位置(肩胛骨、肋骨阻挡;结节贴近斜裂胸膜;结节靠近血管)肺结节,使得胸腔镜下肺结节楔形切除术更加精准、安全。
36.肺由五个不同的肺叶组成,其中左肺包含上下两片肺叶,右肺包含上中下三片肺叶,左肺由斜裂分割为上叶和下叶两个部分,右肺由水平裂和斜裂分为上叶、中叶和下叶三个部分。
37.如图1所示,一种基于流域分析技术的肺叶自动分段方法,该方法包括以下步骤:
38.步骤一、获取ct图像数据;
39.步骤二、在ct图像上分割出包含结节的肺组织区域;
40.步骤三、对包含结节的肺组织区域进行形态学运算填充肺段动脉,确定包含结节的肺动脉;
41.步骤四、断开包含结节的肺动脉根部,使其成为一个独立的连通域,并从肺段动脉根部至各分支末梢提取出中心线;
42.步骤五、按照中心线结构,设定分支结构,计算不同分支在肺组织区域内不同支配区域,从而完成对包含结节的肺组织区域的分段。
43.其中,步骤二的具体步骤包括:
44.步骤二一、首先对ct图像数据统计直方图,得到一个初始分割阈值,在满足初始分割阈值的区域选取种子点,以该种子点为起点,利用3d区域生长提取出肺组织;
45.根据本发明实施例,肺组织的密度分布比较均匀,因此,ct图像上的肺组织灰度值分布也比较均匀,在获取初始分割阈值时可以用中间层ct图像的阈值近似代替整个肺组织的初始分割阈值。这样做的好处是,在对初始分割阈值精度影响很小的情况下,大大缩减了计算整个肺组织区域的初始分割阈值的计算量,从而满足实际应用的要求。因为肺组织区域的灰度值和背景区域(肺组织周围组织)的灰度值有明显的差异,在图像图上会呈现出一个明显的波谷。因此,可以利用统计直方图的方法,找到两个波峰之间的波谷,也就是从肺组织灰度值到周围组织灰度值过度的区域,从而确定出初始分割阈值t。一旦确定好初始分割阈值,就可以二值化该层ct图像,灰度值大于阈值t的区域标记为1,灰度值小于阈值t的
区域标记为0。
46.用直方图阈值二值化的图像确定了原始ct图像上肺组织的区域,选择该区域上的一点作为初始种子点,用3d区域生长提取出整个肺组织。
47.步骤二二、然后引入连通域方法来剔除气管,随后判断左右肺是否粘连,如果粘连,则剔除粘连区域,得到两个互不相连的区域;
48.根据本发明实施例,此时,气管也包含在了经过上述步骤提取的肺组织中。这是由于气管的密度比肺组织的密度还要小,因此在ct图像中气管的灰度值要小于肺组织的灰度值。因为气管使左右肺粘连在一起,要想分离左右肺首先得剔除使左右肺粘连的气管,虽然气管的灰度值比肺组织的小,但是肺组织灰度值与气管灰度值之间并没有一个明显的界限。然而气管有着自己独特的分布特征,气管的顶端只有一报分布在两个肺的中间,然后分成两根,各自进入左肺和右肺,从气管的顶端到分成两根气管进入左右肺之前的部分是不与肺组织粘连的。通过统计每个连通域像素点的个数,剔除像素点数较小的连通域区域,保留像素点数较大的两个连通域区域。
49.剔除气管之后,左右肺己经是两个独立的联通区域,然而由于个体与个体的差异,以及ct图像是在肺充分张开时的扫描图像,有些数据即便是在剔除气管之后,在肺的边缘区域仍然会有小面积的粘连。因此必须判断在剔除气管之后的左右肺组织是否还有粘连,利用前面介绍的两次遍历法在3d图像上直接判断是否粘连,如果只有一个连通域则左右肺依然粘连,就需要剔除左右肺的小面积粘连,分离左右肺为两个互相独立的连通域,如果有两个体积相当的连通域,则左右肺已经不再粘连。
50.步骤二三、最后,把两个互不相连的区域分别标记为左肺和右肺组织。
51.因为肺血管是从心脏出来进入肺中,最后又从肺中出来回到心脏,而心脏在ct图像中的灰度值与血管基本相同,并且相互连接在一起,所以为了排除分割肺血管时心脏的干扰,必须要把肺单独提取出来再进行肺血管的分割,步骤二已经完成了肺组织的分割,但是由于血管在ct图像中的灰度值明显高于肺组织的灰度值,因此提取的肺组织中只包含了相对比较细和灰度值比较低的肺血管,而比较粗的和灰度值比较高的血管却没有包含进来。因此首先要把粗的血管也包含进来。
52.其中,步骤三的具体步骤包括:
53.根据本发明实施例,需要对分割好的肺组织区域进行形态学闭运算,即先膨胀处理,以填充血管;然后再对肺组织区域腐蚀,以恢复原来肺组织区域的大小,从而确定包含结节的肺血管,且获得包含肺血管的肺组织区域。
54.在图像上进行形态学的先膨胀后腐蚀运算称为闭运算,目的是填充比结构元素小的孔洞以及平滑图像的边缘,因此形态学闭运算可以填充肺血管。本发明在步骤二的肺组织提取结果基础上,通过选取合适的结构元素在ct影像层上执行形态学闭运算,最终获得包含肺血管的肺部组织区域。
55.其中,步骤四的具体步骤包括:
56.根据本发明实施例,由于血管的根部与气管的根部紧紧相邻,而且都在肺部的边缘,肺血管的根部的直径也比其他部分血管的直径大,因此可以腐蚀肺组织的边缘的血管来断开肺血管的根部,实现不同肺叶肺血管的分离,得到五个互不相连的连通域。
57.然后可以采用消去法提取血管的中心路径即中心线,其过程如下:
58.首先要把三维体素点分为两类,所有肺血管像素点分为一类,即目标点;所有背景像素点分为一类,即背景点。消去算法的原理为:如果某个目标点同时满足以下四个条件,则该目标点便可以消去为背景点,四个条件为:该点是目标点,且26邻域中存在至少两个别的目标点;该点26邻域内存在背景点;该点26邻域中除该点外,其他任意两个目标点都可以通过6邻接目标点到达对方,即只有一个6邻接连通域;该点26邻域中的任意两个背景点也可以通过6邻接背景点到达对方,即背景点只有一个6邻接连通域。
59.根据本发明实施例,应用流域分析技术对肺完成五叶十八段分段,在一个给定三维空间内(如右肺上叶),首先设定初始的生长区域(标记血管),生长区域内的体素点都标成种子点,种子点然后按照恒定速率,和26邻域的关系向外生长,直到所有种子点都占满了给定空间(整个右肺上叶中都是血管的种子点了),这样就完成了区域生长。由此,如图2所示,步骤五的具体步骤包括:
60.首先(选定种子点)应当确定需要分段的部位,如右肺上叶等,然后选取其内部不同的血管即不同的肺动脉根部进行标记,将选定的血管及其更细小分支设为初始种子点,即多初始种子点;
61.第二步(设定生长条件)各个选定的血管中每个种子点将按照恒定的速率生长。因是在三维空间中,在这里采用26邻域区域生长。
62.下面介绍26邻域的概念:即与中心种子点相邻的三维空间中26个体素点都认为是其邻域点,包括与其直接相连和对角线相连的体素,比如设中心种子体素点坐标为(i,j,k),那么(i
±
1,j
±
1,k
±
1)共27个点,除去原始中心点(i,j,k),周围共计是26个点。另外根据距离来定义26邻域的话,比如有两个点一个是种子点a(x1,y1,z1)和周围点b(x2,y2,z2),他们之间的欧氏距离为只要为方便运算,即只要满足distance2≤3就认为周围点b是种子点a的26邻域点中之一。
63.在上面介绍了26邻域概念,下面介绍种子点的生长规则:为了保证每个种子点能够按照恒定速率进行生长,设定在每一次迭代中,每一个种子点只生长一次。下面是生长规则,也就是合并准则:每个种子点在每一次的生长时,只要周围点满足该种子点的26邻域关系,并且周围点不是种子点,就把周围点与该种子点合并到一起,并把周围点也标记为种子点。
64.最后(设定生长停止条件)设定每个种子点的生长停止条件:当生长区域到达肺边界或是斜裂、水平裂,或者两个生长区域相接即停止生长。也可以解释为,周围26邻域点(或到达边界后凑不够26个邻域点)均为种子点(不论是不是本段的种子点)。满足此条件,就让该种子点不再生长。
65.当每个种子点都停止生长后,那么分段就完成了。图3示出了本发明一种基于流域分析技术的肺叶自动分段方法中流域分析定位原理示意图。以整个动脉模型为基础,其中每个分支均由n个点构成(图3中a);每个点均向外做球形等速膨胀,当两个不同分支的点膨胀到重合时,或者当各点触及胸膜、肺裂边界时,会自动停止(图3中b、c);该动脉分支所属各个点的膨胀边界便构成了该动脉的流域范围(图3中d、e、f)。
66.进一步举例说明。例如,令r为整个待分段区域,r0,r1,...ri,...,rn是即将要分成n段的区域,初始的每个ri区域内都包含一定数量的种子点si
ijk
,另外v
ijk
为分段区域r内的体素。(1)从r0到r
n
,先遍历r
i
内的种子点si
ijk
,找到种子点si
ijk
的26邻域点v1
ijk
,
v2
ijk
,...,v26
ijk
,这26个邻域点中若有点同时满足
①
distance2≤3;
②
这两个条件,就将该邻域点设为r
i
内的种子点si,再将该点合并到区域r
i
内,r
i
=r
i
∪v
ijk
。遍历完r
i
内种子点,继续遍历r
i+1
内种子点,直到r
n
。(2)完成一次r0到r
n
的遍历之后,检查
③
区域r内的体素点是否均为种子点s,若是那么结束,输出分段r
i
到r
n
;若否,继续重复步骤(1)r0到r
n
的遍历,直到满足条件
③
。
67.本发明应用流域分析技术对肺完成分段,从肺段动脉根部至各分支末梢提取出中心线,在中心线上各点做等距球形扩张,相邻肺段扩张球接触或扩张球与胸膜、肺裂接触则停止生长,无数扩张球形成了不同的流域范围,从而完成对包含结节的肺组织区域的分段;其中,结节所在肺段便是目标肺段,其所从属的肺段动脉便是流域分析对象。术中,主刀医生通过阻断目标动脉联合吲哚菁绿荧光反染,使目标肺段边界得以清晰显示。对照术前流域分析结果,可将目标肺段内的结节精准楔切。本发明方法能够在术前无创伤的前提下,以肺段动脉为基础,对包含肺结节的肺叶进行准确分段,从而对肺结节所在位置进行精准定位,从而使得术中定位时间短、操作简单,给特殊位置肺结节精准定位及楔形切除的实施带来希望。
68.尽管根据有限数量的实施例描述了本发明,但是受益于上面的描述,本技术领域内的技术人员明白,在由此描述的本发明的范围内,可以设想其它实施例。对于本发明的范围,对本发明所做的公开是说明性的,而非限制性的,本发明的范围由所附权利要求书限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1