一种基于多源遥感图像显著度模糊融合的舰船检测方法
1.本发明属于图像处理方法与多源传感器融合应用领域,具体地,涉及一种基于多源遥感图像显著度模糊融合的舰船检测方法。
背景技术:
2.舰船目标检测是图像处理的重要应用之一,精确的舰船检测对于海洋安全、渔业监控、海事交通等领域具有重要意义。目前基于单传感器图像的舰船目标检测具有其自身的局限性,特别是在处理近岸干扰严重、目标结构复杂等场景时,这些单传感器图像处理方法的目标检测性能将出现明显的恶化。一种有效的方案是利用多源传感器图像进行融合处理,以提高图像质量和检测性能,但是针对具体的舰船检测应用,现有多源传感器图像融合方法的效果并不理想。因此,基于多源遥感图像融合的思路,有必要研究能够同时实现舰船目标增强和背景(包括海杂波、近岸干扰等)抑制的舰船检测方法,提高图像融合质量和舰船目标检测性能。
技术实现要素:
3.本发明的目的是为克服已有技术的不足之处,提出一种基于多源遥感图像显著度模糊融合的舰船检测方法。本发明可同时实现舰船目标增强和背景(包括海杂波、近岸干扰等) 抑制,以提高图像融合质量和舰船目标检测性能。
4.本发明提出一种基于多源遥感图像显著度模糊融合的舰船检测方法,其特征在于,该方法首先从多源传感器获取多张遥感图像,对每张遥感图像通过计算该图像的多阶超像素级显著度特征生成对应的全局区域对比度图像;然后利用基于区域特征的模糊逻辑方法对每张全局区域对比度图像进行处理,实现多源遥感图像的多阶超像素级显著度特征融合,生成一张融合图像;对该融合图像进行取阈值操作,通过阈值判定生成该融合图像对应的二值图像,得到舰船目标检测的最终结果。该方法包括以下步骤:
5.(1)获取多源遥感图像,通过挖掘多源遥感图像的多阶超像素级显著度特征,生成对应的全局区域对比度图像;具体步骤如下:
6.(1
‑
1)通过多源传感器获取多幅遥感图像,对每幅遥感图像提取兴趣区域并配准后得到该遥感图像对应的原始图像,将第s张遥感图像对应的原始图像记为i
s
,其中下标s∈{1,2,
…
,s},s≥2表示多源传感器获取的遥感图像的数量;
7.(1
‑
2)利用基于边缘信息的形态学对各原始图像进行处理生成对应的候选图像:
[0008][0009]
式中,ε(i
s
)为原始图像i
s
的二值边缘图像;为形态学闭操作;se
s
为对ε(i
s
)进行形学闭操作的结构元素;
[0010]
(1
‑
3)对每张候选图像进行超像素分割,根据分割的结果将对应的原始图像分成多个超像素,得到该候选图像对应的原始图像的各超像素区域;
[0011]
记对任一候选图像c
s
进行超像素分割后,根据分割结果得到的原始图像i
s
超像素
区域表示为r
l
,l=1,2,
…
,l,,其中,l为候选图像c
s
超像素分割的个数;
[0012]
(1
‑
4)生成每张原始图像对应的全局区域对比度图像;
[0013]
对于原始图像i
s
,其对应的全局区域对比度图像生成方法如下:
[0014]
(1
‑4‑
1)根据每一个超像素区域r
l
,l=1,2,
…
,l,计算对应的一阶显著度值p1(r
l
)和二阶显著度值p2(r
l
),表达式如下:
[0015][0016]
式中下标u表示显著度的阶数;w
size
(r
l
′
)表示第l
′
个超像素r
l
′
的尺寸权重:
[0017][0018]
式中,表示超像素r
l
′
中的像素数量,表示超像素r
l
中的像素数量; w
spatial
(r
l
′
,r
l
)表示空间距离权重:
[0019][0020]
式中,d
spatial
(r
l
′
,r
l
)表示超像素r
l
′
和超像素r
l
几何中心之间的欧氏距离,σ
spatial
表示空间距离权重强度的控制参数;d
u
(r
l
′
,r
l
)表示超像素r
l
′
和超像素r
l
之间的第u阶颜色距离,u=1,2;
[0021]
d1(r
l
′
,r
l
)=|mean(i(r
l
′
))
‑
mean(i(r
l
))|
[0022]
d2(r
l
′
,r
l
)=|std(i(r
l
′
))
‑
std(i(r
l
))|
[0023]
式中,mean(i(r
l
))表示超像素区域r
l
中的像素强度均值,std(i(r
l
))表示超像素区域r
l
中的像素强度标准差;
[0024]
(1
‑4‑
2)利用步骤(1
‑4‑
1)得到的一阶显著度值p1(r
l
)和二阶显著度值p2(r
l
)生成各超像素区域最终的显著度值:
[0025]
p(r
l
)=max{p1(r
l
),p2(r
l
)}
[0026]
(1
‑4‑
3)生成原始图像i
s
对应的全局区域对比度图像p
s
;p
s
中各位置的像素强度值计算方法如下:
[0027]
p
s
(m,n)=p(r
l
),if(m,n)∈r
l
[0028]
式中,(m,n)表示像素坐标,m=1,2,
…
,m,n=1,2,
…
,n,p
s
(m,n)代表p
s
中坐标(m,n) 处的像素强度值;m表示p
s
中长边的像素个数,n表示p
s
中宽边的像素个数,m
×
n代表p
s
中像素的总数量;
[0029]
(2)利用基于区域特征的模糊逻辑方法对步骤(1)生成的全局区域对比度图像进行处理,实现多源遥感图像的多阶超像素级显著度特征融合;具体步骤如下:
[0030]
(2
‑
1)基于每张全局区域对比度图像p
s
的强度直方图分布特征定义对应的三个模糊集合表示为:
[0031]
[0032]
其中,表示该p
s
中高显著度对应的模糊集合,表示该p
s
中中显著度对应的模糊集合,表示该p
s
中低显著度对应的模糊集合;
[0033]
构造输入模糊隶属度函数:
[0034][0035][0036][0037]
式中表示模糊集合的隶属度函数,表示模糊集合的隶属度函数,表示模糊集合的隶属度函数,x表示p
s
中的任一像素强度值,{l
in
,l
′
in
,m
′
in
,h
′
in
,h
in
} 表示输入模糊隶属度函数的参数;
[0038]
其中输入模糊隶属度函数的参数{l
in
,l
′
in
,m
′
in
,h
′
in
,h
in
}设置为:
[0039][0040]
式中c1,c2,c3分别表示该p
s
的低显著度范围中心、中等显著度范围中心和高显著度范围中心;δl
in
和δh
in
为正数;
[0041]
(2
‑
2)利用多源遥感图像的观测特点构造模糊融合规则:
[0042][0043]
式中r
q
表示第q条模糊准则,q=1,2,
…
,q,q=3
s
表示模糊准则的数量;表示输出模糊集合,k∈{l,m,h},h代表高显著度、m代表中等显著度、l代表低显著度;包含图像p
s
对应的三个模糊集合;
[0044]
构造输出模糊隶属度函数:
[0045][0046][0047][0048]
式中,为低显著度输出模糊隶属度函数,为中等显著度输出模糊隶属度函数,为高显著度输出模糊隶属度函数,表示输出模糊隶属度函数的参数;
[0049]
(2
‑
3)根据构造的模糊隶属度函数和模糊融合准则,对每张全局区域对比度图像p
s
进行处理,选取聚合算子和解模糊算子,实现多源遥感图像的多阶超像素级显著度特征融合,最终生成一张融合图像p
f
:
[0050]
p
f
(m,n)=y
mn
[0051]
式中,p
f
(m,n)代表p
f
中该坐标(m,n)处的像素值,y
mn
表示模糊融合后(m,n)处的像素强度值,m=1,2,
…
,m,n=1,2,
…
,n;
[0052]
(3)利用步骤(2)得到的融合图像进行取阈值操作,实现舰船目标检测;具体步骤如下:
[0053]
(3
‑
1)基于融合图像p
f
的强度直方图分布特征选取分割阈值th;
[0054]
(3
‑
2)根据选取的分割阈值th对融合图像p
f
进行二值分割:当p
f
中任一位置的像素强度值大于th时,判定该位置在二值图像中像素强度值为1;否则判定为0;
[0055]
对p
f
中所有位置的像素强度值判定完毕后,最终得到的二值图像即为最终的目标检测图像,实现舰船目标的检测。
[0056]
本发明的特点及有益效果在于:
[0057]
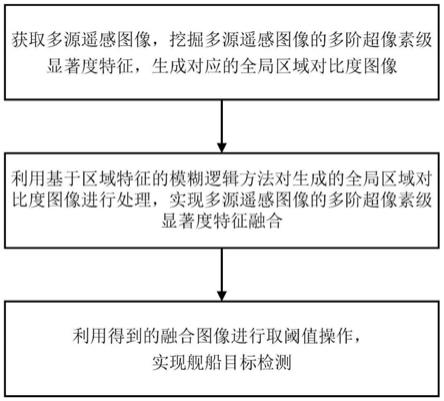
本发明提出的一种基于多源遥感图像显著度模糊融合的舰船检测方法,首先通过挖掘多源遥感图像的多阶超像素级显著度特征,生成对应的全局区域对比度图像,以提取舰船目标区域并抑制杂波、近岸干扰等背景区域;然后,利用基于区域特征的模糊逻辑方法对生成的全局区域对比度图像进行处理,实现多源遥感图像的多阶超像素级显著度特征融合,以进一步增强舰船目标区域并滤除近岸干扰区域;最后,利用得到的融合图像进行取阈值操作,实现舰船目标检测。该舰船检测方法有效增强了目标区域并减小了误警概率,提高了融合图像的信杂比和目标检测性能,对实际的舰船目标检测任务具有重要意义。
附图说明
[0058]
图1是本发明提出的一种基于多源遥感图像显著度模糊融合的舰船检测方法的流
程图;
[0059]
图2是本发明实施例中星载合成孔径雷达图像和机载合成孔径雷达图像;
[0060]
图3是本发明实施例中星载合成孔径雷达图像和机载合成孔径雷达图像对应的候选图像;
[0061]
图4是本发明实施例中星载合成孔径雷达图像和机载合成孔径雷达图像的超像素分割示意图;
[0062]
图5是本发明实施例中星载合成孔径雷达图像和机载合成孔径雷达图像的全局区域对比度图像;
[0063]
图6是本发明实施例中多源遥感图像的融合图像;
[0064]
图7是本发明实施例中融合图像的像素强度直方图;
[0065]
图8是本发明实施例中舰船目标的检测图像。
具体实施方式
[0066]
为了有效增强目标区域并减小误警概率,提高融合图像质量和目标检测性能,本发明提出了一种基于多源遥感图像显著度模糊融合的舰船检测方法。为了使本发明的目的、技术方案及优点更加清楚明白,接下来结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0067]
本发明提出一种基于多源遥感图像显著度模糊融合的舰船检测方法,该方法首先从多源传感器获取多张遥感图像,对每张遥感图像通过计算该图像的多阶超像素级显著度特征生成对应的全局区域对比度图像;然后利用基于区域特征的模糊逻辑方法对每张全局区域对比度图像进行处理,实现多源遥感图像的多阶超像素级显著度特征融合,生成一张融合图像;对该融合图像进行取阈值操作,通过阈值判定生成该融合图像对应的二值图像,得到舰船目标检测的最终结果。该方法整体流程如图1所示,包括以下步骤:
[0068]
(1)获取多源遥感图像,通过挖掘多源遥感图像的多阶超像素级显著度特征,生成对应的全局对比度图像,以提取舰船目标区域并抑制杂波、近岸干扰等背景区域。具体步骤如下:
[0069]
(1
‑
1)通过多源传感器获取多幅遥感图像,对每幅遥感图像提取兴趣区域并配准后得到该遥感图像对应的原始图像,将第s张遥感图像对应的原始图像记为i
s
,其中下标 s∈{1,2,
…
,s},s≥2表示多源传感器获取的遥感图像的数量;
[0070]
(1
‑
2)利用基于边缘信息的形态学对各原始图像进行处理生成对应的候选图像:
[0071][0072]
式中,i
s
为第s张原始图像,下标s∈{1,2,
…
,s},s表示多源遥感图像的数量;ε(i
s
)为原始图像i
s
的二值边缘图像;为形态学闭操作;se
s
为对ε(i
s
)进行形态学闭操作的结构元素;
[0073]
(1
‑
3)对每张候选图像进行超像素分割,根据分割的结果将对应的原始图像分成多个超像素,得到该候选图像对应的原始图像的各超像素区域;
[0074]
记对任一候选图像c
s
进行超像素分割后,根据分割结果得到的原始图像i
s
超像素区域表示为r
l
,l=1,2,
…
,l,,其中,l为候选图像c
s
超像素分割的个数;对于不同的c
s
,l取
值可不同。
[0075]
(1
‑
4)生成每张原始图像对应的全局区域对比度图像;
[0076]
对于原始图像i
s
,其对应的全局区域对比度图像生成方法如下:
[0077]
(1
‑4‑
1)根据每一个超像素区域r
l
(l=1,2,
…
,l),计算对应的一阶显著度值p1(r
l
)和二阶显著度值p2(r
l
),表达式如下:
[0078][0079]
式中下标u表示显著度的阶数;w
size
(r
l
′
)表示第l
′
个超像素r
l
′
(l
′
=1,2,
…
,l)的尺寸权重:
[0080][0081]
式中,表示超像素r
l
′
中的像素数量,表示超像素r
l
中的像素数量; w
spatial
(r
l
′
,r
l
)表示空间具体权重:
[0082][0083]
式中,d
spatial
(r
l
′
,r
l
)表示超像素r
l
′
和超像素r
l
几何中心之间的欧氏距离,σ
spatial
表示空间距离权重强度的控制参数;d
u
(r
l
′
,r
l
)(u=1,2)表示超像素r
l
′
和超像素r
l
之间的第u阶颜色距离(或对比度):
[0084]
d1(r
l
′
,r
l
)=|mean(i(r
l
′
))
‑
mean(i(r
l
))|
[0085]
d2(r
l
′
,r
l
)=|std(i(r
l
′
))
‑
std(i(r
l
))|
[0086]
式中,mean(i(r
l
))表示超像素区域r
l
中的像素强度均值,std(i(r
l
))表示超像素区域r
l
中的像素强度标准差;
[0087]
(1
‑4‑
2)利用步骤(1
‑4‑
1)得到的一阶显著度值p1(r
l
)和二阶显著度值p2(r
l
)生成各超像素区域最终的显著度值:
[0088]
p(r
l
)=max{p1(r
l
),p2(r
l
)}
[0089]
(1
‑4‑
3)生成原始图像i
s
对应的全局区域对比度图像p
s
;p
s
中各位置的像素强度值计算方法如下:
[0090]
p
s
(m,n)=p(r
l
),if(m,n)∈r
l
[0091]
式中,(m,n)表示像素坐标,m=1,2,
…
,m,n=1,2,
…
,n,p
s
(m,n)代表p
s
中坐标(m,n) 处的像素强度值;m表示p
s
中长边的像素个数,n表示p
s
中宽边的像素个数,m
×
n代表 p
s
中像素的总数量;
[0092]
(2)利用基于区域特征的模糊逻辑方法对步骤(1)生成的全局区域对比度图像进行处理,实现多源遥感图像的多阶超像素级显著度特征融合,以进一步增强舰船目标区域并滤除近岸干扰区域。具体步骤如下:
[0093]
(2
‑
1)基于每张全局区域对比度图像p
s
(s=1,2,
…
,s)的强度直方图分布特征定义三个语义变量:“高显著度”h、“中等显著度”m、“低显著度”l,以表示该p
s
中像素强度的范
围,对应的模糊集合可以表示为:
[0094][0095]
其中,表示该p
s
中“高显著度”对应的模糊集合,表示该p
s
中“中显著度”对应的模糊集合,表示该p
s
中“低显著度”对应的模糊集合。对每一张p
s
均要划分出该三个模糊集合。
[0096]
构造输入模糊隶属度函数:
[0097][0098][0099][0100]
式中表示模糊集合(或“低显著度”范围)的隶属度函数,表示模糊集合(或“中等显著度”范围)的隶属度函数,表示模糊集合(或“高显著度”范围)的隶属度函数,x表示每张p
s
的任一像素强度值,{l
in
,l
′
in
,m
′
in
,h
′
in
,h
in
}表示输入模糊隶属度函数的参数,l
in
>l
′
in
,h
in
<h
′
in
,l
′
in
<m
′
in
<h
′
in
;(其中,每张p
s
取值都有自己对应的一组参数值。)
[0101]
其中输入模糊隶属度函数的参数{l
in
,l
′
in
,m
′
in
,h
′
in
,h
in
}设置为:
[0102][0103]
式中c1,c2,c3分别表示该p
s
的低显著度范围中心、中等显著度范围中心和高显著度范围中心,其值可以通过对该p
s
的像素强度值进行k
‑
means聚类算法确定;δl
in
和δh
in
表示两个数值较小的正数,以保证的输入模糊隶属度函数之间的相互覆盖特性。
[0104]
(2
‑
2)利用多源遥感图像的观测特点构造模糊融合规则:
[0105][0106]
式中r
q
表示第q条模糊准则,q=1,2,
…
,q,表示输出模糊集合,k∈{l,m,h}, q=3
s
表示模糊准则的数量,s表示多源遥感图像的数量;包含图像p
s
对应的三个模糊集合;
[0107]
构造输出模糊隶属度函数:
[0108][0109][0110][0111]
式中,为低显著度输出模糊隶属度函数,为中等显著度输出模糊隶属度函数,为高显著度输出模糊隶属度函数,表示输出模糊隶属度函数的参数;
[0112]
(2
‑
3)根据构造的模糊隶属度函数和模糊融合准则,对每张全局区域对比度图像 p
s
(s=1,2,
…
,s)进行处理,选取合适的聚合算子和解模糊算子,实现多源遥感图像的多阶超像素级显著度特征融合,最终生成一张融合图像p
f
:
[0113]
p
f
(m,n)=y
mn
[0114]
式中,p
f
(m,n)代表p
f
中该坐标(m,n)处的像素值,y
mn
表示模糊融合后(m,n)处的像素强度值,m=1,2,
…
,m,n=1,2,
…
,n。
[0115]
(3)利用步骤(2)得到的融合图像进行取阈值操作,实现舰船目标检测。具体步骤如下:
[0116]
(3
‑
1)基于融合图像p
f
的强度直方图分布特征选取合适的分割阈值th(可通过最优全局阈值处理或其他方法获得该阈值);
[0117]
(3
‑
2)根据选取的分割阈值th对融合图像p
f
进行二值分割:当p
f
中任一位置的像素强度值大于th时,判定该位置在二值图像中像素强度值为1;否则判定为0;
[0118]
对p
f
中所有位置的像素强度值判定完毕后,最终得到的二值图像即为最终的目标检测图像,实现舰船目标的检测。
[0119]
本发明通过首先挖掘多源遥感图像的多阶超像素级显著度特征,生成对应的全局区域对比度图像,以提取舰船目标区域并抑制杂波、近岸干扰等背景区域;然后,利用基于区域特征的模糊逻辑方法对生成的全局区域对比度图像进行处理,实现多源遥感图像的多阶超像素级显著度特征融合,以进一步增强舰船目标区域并滤除近岸干扰区域;最后,利用得到的融合图像进行取阈值操作,实现舰船目标检测。
[0120]
下面结合一个具体实施例对本发明进一步详细说明如下:
[0121]
本实施例提出一种基于多源遥感图像显著度模糊融合的舰船检测方法,具体实施步骤如下:
[0122]
(1)获取多源遥感图像,挖掘多源遥感图像的多阶超像素级显著度特征,生成对应的全局区域对比度图像,以提取舰船目标区域并抑制杂波、近岸干扰等背景区域。
[0123]
(1
‑
1)本实施例利用高分3号卫星采集的星载合成孔径雷达图像和无人机采集的机载合成孔径雷达图像作为多源遥感图像,对两幅图像提取兴趣区域并配准后,分别生成对应的原始图像记为i1和i2,该两幅原始图像分别如图2(a)和图2(b)所示。
[0124]
(1
‑
2)利用基于边缘信息的形态学对各原始图像进行处理生成对应的候选图像:
[0125][0126]
式中i
s
为第s张原始遥感图像,本实施例下标s∈{1,2},ε(i
s
)为原始图像i
s
的二值边缘图像;为形态学闭操作,se
s
为为对ε(i
s
)形态学闭操作的结构元素。本实施例原始图像i1和i2对应的候选图像表示为c1和c2,分别如图3(a)和图3(b)所示。
[0127]
(1
‑
3)对候选图像c1和c2进行超像素分割,根据分割的结果将原始图像i1和i2分成多个超像素,本实施例分割结果分别如图4(a)和图4(b)所示。
[0128]
(1
‑
4)计算每个超像素区域的多阶显著度值,获得多源遥感图像的全局区域对比度图像p1和p2,分别如图5(a)和图5(b)所示。
[0129]
(2)利用基于区域特征的模糊逻辑方法对生成的全局区域对比度图像p1和p2进行处理,实现多源遥感图像的多阶超像素级显著度特征融合,以进一步增强舰船目标区域并滤除近岸干扰区域。具体步骤如下:
[0130]
(2
‑
1)基于每张全局区域对比度图像p
s
(s=1,2)的强度直方图分布特征构造输入模糊隶属度函数,其中输入模糊隶属度函数的参数{l
in
,l
′
in
,m
′
in
,h
′
in
,h
in
}设置为:
[0131][0132]
式中c1,c2,c3分别表示低显著度范围中心、中等显著度范围中心和高显著度范围中心,其值可以通过k
‑
means聚类算法确定;δl
in
和δh
in
表示两个数值较小的正数,以保证的输入模糊隶属度函数之间的相互覆盖特性。
[0133]
(2
‑
2)利用星载和机载遥感图像的观测特点构造模糊融合规则:
[0134][0135]
式中r
q
表示第q条模糊准则,q=1,2,
…
,q,表示输出模糊集合,k∈{l,m,h},q=9 表示模糊准则的数量。在本实施例中,考虑到机载遥感图像比星载遥感图像具有更高的空间分辨率,且其获取时间晚于星载遥感图像(表明机载遥感图像中的目标信息更加可靠),构造的模糊融合准则如下表所示,其中分别对应机载遥感图像和星载遥感图像。
[0136]
表1本实施例中模糊融合准则表
[0137][0138]
构造输出模糊隶属度函数,其中输出模糊隶属度函数的参数设置为:
[0139][0140]
上述设置的参数能够保证输出模糊隶属度函数之间的相互覆盖特性。
[0141]
(2
‑
3)根据构造的模糊隶属度函数和模糊融合准则,对全局区域对比度图像 p
s
(s=1,2)进行处理,选取合适的聚合算子(例如最大
‑
最小算子)和解模糊算子(例如质心解模糊算子),实现多源遥感图像的多阶超像素级显著度特征融合,生成最后的融合图像p
f
:
[0142]
p
f
(m,n)=y
mn
[0143]
式中,p
f
(m,n)代表p
f
中该坐标(m,n)处的像素值,y
mn
表示模糊融合后(m,n)处的像素强度值,m=1,2,
…
,m,n=1,2,
…
,n。在本实施例中,获得的融合图像p
f
如图6所示。
[0144]
(3)利用步骤(2)得到的融合图像p
f
进行取阈值操作,实现舰船目标检测。
[0145]
(3
‑
1)基于融合图像p
f
的强度直方图(如图7所示)分布特征选取合适的分割阈值th =0.2。
[0146]
(3
‑
2)根据选取的分割阈值th对融合图像p
f
进行二值分割:当p
f
中任一位置的像素强度值大于th时,判定该位置在二值图像中像素强度值为1;否则判定为0;对p
f
中所有位置的像素强度值判定完毕后,最终得到的二值图像即为最终的目标检测图像,如图8所示,最终实现舰船目标的检测。
[0147]
本发明提供的实施例中,获得的融合图像p
f
很好地增强了舰船目标区域并抑制了海杂波、近岸干扰等背景区域,将融合图像p
f
用于舰船目标检测任务,能够提高目标检测性能。
[0148]
本领域的技术人员容易理解,以上所述仅为本发明的一个实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1