一种缺损二维码定位方法与流程
1.本发明公开一种方法,涉及图像识别技术领域,具体地说是一种缺损二维码定位方法。
背景技术:
2.随着科技进步,二维码无处不在,二维码另一个名称是qr code(quick response code),近年来在移动设备上经常使用。与传统条形码相比,可以存储更多的信息,二维码本质上是密码算法,最终得到二进制编码。在最后这串编码中,一个0对应的就是一个白色小方块,一个1对应的就是一个黑色的小方块。小方块按照8个一组,填进大方块里,就是一个完整的,可以被识别的二维码图案。
3.目前识别时需要对输入的二维码图像进行二维的卷积,进行大量的运算,尤其是对高清图像时,计算的复杂度急剧上升,并且在图像中扫描二维码,而缺损二维码时,无法提高目标物体的精度。
技术实现要素:
4.本发明针对现有技术的问题,提供一种缺损二维码定位方法,结合二维码识别与目标检测技术,进行目标物体的精确定位,以便提升目标检测识别的精度。
5.本发明提出的具体方案是:
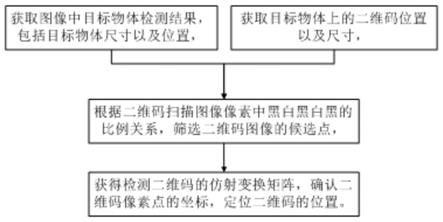
6.一种缺损二维码定位方法,获取图像中目标物体检测结果,包括目标物体尺寸以及位置,
7.获取目标物体上的二维码位置以及尺寸,
8.根据二维码扫描图像像素中黑白黑白黑的比例关系,筛选二维码图像的候选点,获得检测二维码的仿射变换矩阵,确认二维码像素点的坐标,定位二维码的位置。
9.所述的一种缺损二维码定位方法中根据二维码扫描图像像素中黑白黑白黑的比例关系为1:1:3:1:1,筛选二维码图像的候选点。
10.所述的一种缺损二维码定位方法中利用紧邻点融合算法确认二维码像素点的坐标。
11.所述的一种缺损二维码定位方法中具体步骤为:
12.搜索每个点附近一定距离内近邻点的数量,用每个点近邻点集的平均坐标代替原本的坐标,
13.当拥有近邻点集的点数量小于预设值时或者迭代次数到达预设的最大迭代次数时结束迭代,
14.筛选出拥有紧邻点最多的三个点,求出的平均坐标就是三个位置探测图形所在的坐标,
15.判断得到的三个点坐标是否为正确的三个位置探测图形位置,若不是,则调整参数进行再次计算,直到判断通过。
16.一种缺损二维码定位系统,包括获取模块、筛选模块及定位模块,
17.获取模块获取图像中目标物体检测结果,包括目标物体尺寸以及位置,
18.获取目标物体上的二维码位置以及尺寸,
19.筛选模块根据二维码扫描图像像素中黑白黑白黑的比例关系,筛选二维码图像的候选点,定位模块获得检测二维码的仿射变换矩阵,确认二维码像素点的坐标,定位二维码的位置。
20.所述的一种缺损二维码定位系统中筛选模块根据二维码扫描图像像素中黑白黑白黑的比例关系为1:1:3:1:1,筛选二维码图像的候选点。
21.所述的一种缺损二维码定位系统中定位模块利用紧邻点融合算法确认二维码像素点的坐标。
22.所述的一种缺损二维码定位系统中定位模块确认二维码像素点的坐标的具体步骤为:
23.搜索每个点附近一定距离内近邻点的数量,用每个点近邻点集的平均坐标代替原本的坐标,
24.当拥有近邻点集的点数量小于预设值时或者迭代次数到达预设的最大迭代次数时结束迭代,
25.筛选出拥有紧邻点最多的三个点,求出的平均坐标就是三个位置探测图形所在的坐标,
26.判断得到的三个点坐标是否为正确的三个位置探测图形位置,若不是,则调整参数进行再次计算,直到判断通过。
27.本发明的有益之处是:
28.本发明提供一种缺损二维码定位方法,与现有技术相比,在不增加计算量的同时,提高了目标检测检测的精度,使得原本使用深度学习进行目标检测的时候,目标框乱闪动的情况大大减少了,在此基础上,使得检测的精度更加精确。
附图说明
29.图1是本发明方法流程示意图。
30.图2是现有技术中二维码示意图。
具体实施方式
31.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
32.本发明提供一种缺损二维码定位方法,获取图像中目标物体检测结果,包括目标物体尺寸以及位置,
33.获取目标物体上的二维码位置以及尺寸,
34.根据二维码扫描图像像素中黑白黑白黑的比例关系,筛选二维码图像的候选点,获得检测二维码的仿射变换矩阵,确认二维码像素点的坐标,定位二维码的位置。
35.利用本发明方法识别目标位置,以及尺寸大小,在此基础上结合二维码识别与目标检测技术,用来进行目标物体的精确定位用来提升深度学习目标检测算法的精度。
36.具体应用中,在本发明方法的一些实施例中,针对输入的彩色图片,对图像进行两部分处理。一部分采用深学习的目标检测方法,获取目标检测结果,包括目标物体尺寸以及位置;另一步检测粘贴在目标物体上的二维码位置,检测出二维码位置以及尺寸。
37.获取二维码检测的仿射变换矩阵,也就是在检测二维码的过程中出现的矫正矩阵:
38.横竖扫描图像像素,找到满足黑白黑白黑且比例关系近似1:1:3:1:1的点,将其两端的中点坐标记录下来,最终得到整幅图像所有的候选点,然后下一步筛选出真正的位置探测图形所在位置的点。
39.利用紧邻点融合算法确认二维码像素点的坐标。具体过程为:
40.搜索每个点附近一定距离内近邻点的数量,用每个点近邻点集的平均坐标代替原本的坐标。进行了比较集中的点的集群向内收缩融合,孤立点由于没有紧邻点则会直接删除,在不停的迭代中其他零散的点的紧邻点减少的速度会远远大于三个位置探测图形所在位置相对更集中的点。
41.当拥有近邻点集的点数量小于某个值时(默认定为20)或者迭代次数到达预设的最大迭代次数时结束迭代。
42.筛选出拥有紧邻点最多的三个点,求出其平均坐标就是三个位置探测图形所在的坐标了。
43.判断得到的三个点坐标是否是正确的三个位置探测图形位置,若不是,则调整参数进行二次计算,直到判断通过。
44.通过这样获取二维码精准定位的位置。
45.同时本发明还提供一种缺损二维码定位系统,包括获取模块、筛选模块及定位模块,
46.获取模块获取图像中目标物体检测结果,包括目标物体尺寸以及位置,
47.获取目标物体上的二维码位置以及尺寸,
48.筛选模块根据二维码扫描图像像素中黑白黑白黑的比例关系,筛选二维码图像的候选点,定位模块获得检测二维码的仿射变换矩阵,确认二维码像素点的坐标,定位二维码的位置。
49.上述系统内的各模块之间的信息交互、执行过程等内容,由于与本发明方法实施例基于同一构思,具体内容可参见本发明方法实施例中的叙述,此处不再赘述。
50.需要说明的是,上述较佳实施例中各流程和各系统结构中不是所有的步骤和模块都是必须的,可以根据实际的需要忽略某些步骤或模块。各步骤的执行顺序不是固定的,可以根据需要进行调整。上述各实施例中描述的系统结构可以是物理结构,也可以是逻辑结构,即,有些模块可能由同一物理实体实现,或者,有些模块可能分由多个物理实体实现,或者,可以由多个独立设备中的某些部件共同实现。
51.以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1