一种在超声胆胰管检查中胆胰管宽度的测量方法与流程
1.本发明涉及医疗辅助技术领域,尤其涉及一种在超声胆胰管检查中胆胰管宽度的测量方法。
背景技术:
2.胆管内径的正常值通常不超过15mm,胰管内径的正常值通常不超过2mm,胆胰管扩张是指胆管的内径大于15mm,或是胰管的内径大于2mm。胆胰管扩张的病因主要包括胆胰管结石、胆胰管良性和恶性肿瘤、胰头癌、十二指肠壶腹周围癌、急慢性胰腺炎、肝门区肿大淋巴结压迫胆胰管、胆道蛔虫、急性化脓性胆胰管炎等,是一种较为常见的疾病。由于其漏诊或误诊可导致复发性上行性胆胰管炎、胆汁性肝硬变、胆胰管穿孔或破裂、复发性胰腺炎等急慢性并发症,严重时可危及患者生命,因而胆胰管扩张的早期诊断十分关键。
3.超声内镜是诊断胆胰管扩张灵敏度最高的检查之一,其具有高分辨率和动态实时的特点,其诊断胆胰管扩张的流程为:在腹主动脉、肝门、胰体、胰尾、胰颈、胃腔胰头、十二指肠球部和十二指肠降部八个站之间完成连续性扫查,并在怀疑胆胰管扩张的部位进行定图,此时由助手协助利用内镜设备配备的键盘进行定点手动测量,但上述流程在临床实践中存在明显不足,内镜医师无法对胆胰管进行实时测量,仅能在怀疑胆胰管发生扩张的部位进行定点测量,因此临床上漏诊屡见不鲜。
4.超声内镜是诊断胆胰管扩张灵敏度最高的检查之一,其具有高分辨率和动态实时的特点,其诊断胆胰管扩张的流程为:在腹主动脉、肝门、胰体、胰尾、胰颈、胃腔胰头、十二指肠球部和十二指肠降部八个站之间完成连续性扫查,并在怀疑胆胰管扩张的部位进行定图,此时由助手协助利用内镜设备配备的键盘进行定点手动测量,但上述流程在临床实践中存在明显不足,内镜医师无法对胆胰管进行实时测量,仅能在怀疑胆胰管发生扩张的部位进行定点测量,因此临床上漏诊屡见不鲜。
5.近年来,人工智能飞速发展,人工智能在消化领域的应用也逐渐增多。经检索,申请号为cn201911347874.3的发明专利实现了经内镜逆行胰胆管造影术中辅助胆管结石和胆管狭窄的诊断,尽管该发明涉及了胆胰管的测量,但是其仅为静态测量,并无动态实时测量的功能,并且本发明的测量方法和该专利也有本质不同。本发明利用人工智能图像识别和图像的几何测量方法,创新性地提出了一种在超声内镜胆胰管的连续性扫描检查中,进行胆胰管实时识别、宽度实时测量的方法,在发现胆胰管内径超过扩张阈值(胆管阈值为15mm,胰管阈值为2mm)时会发出告警信息,以防止胆胰管扩张的漏诊。
技术实现要素:
6.基于背景技术存在的技术问题,本发明提出了一种在超声胆胰管检查中胆胰管宽度的测量方法,具有进行胆胰管实时识别、宽度实时测量,发现胆胰管内径超过扩张阈值时发出告警信息,以防止胆胰管扩张漏诊的特点,解决了现有技术无法对胆胰管进行实时测量,仅能在怀疑胆胰管发生扩张的部位进行定点测量,因此进一步增加了漏诊风险的问题。
7.本发明提供如下技术方案:一种在超声胆胰管检查中胆胰管宽度的测量方法,包括如下步骤:
8.s1、在超声内镜胆胰管的连续性扫描检查中,利用训练好的图像分割神经网络模型,实时识别获取超声内镜检查图像中胆胰管区域,并在影像中标示;
9.s2、根据胆胰管区域边缘的坐标点序列,通过算法得到表征胆胰管区域最宽宽度的线段,并标示;
10.s3、根据线段端点坐标计算其长度,当长度超过设定的阈值时,发出警示。
11.优选的,所述步骤s1中的图像分割神经网络模型包括两组unet++图像分割神经网络模型;第一组unet++图像分割神经网络模型实时识别获取超声内镜检查图像中的有效图像区域,并以其外切水平矩形裁剪图像;另一组unet++图像分割神经网络模型在裁剪图像中识别胆胰管区域,并在影像中标示。
12.优选的,所述步骤s2中根据胆胰管区域首先得到最小外切矩形r,区域的点坐标序列为p,r的四个点为a、b、c、d,短边为ab、cd;遍历p的每个点,和ab组成三角形,计算三角形面积,找到面积最小三角形对应的点p
ab
:
[0013][0014]
同样的,找到cd对应的p
cd
;此时p被p
ab
、p
cd
分成了2部分p1、p2;遍历p1的每个点p1
i
,对每个点遍历p2的各个点p2
j
,这2个点形成一条线段p1
i
p2
j
,计算该线段与ab的夹角,记录下夹角小于10
°
的线段(p1
i
,p2
j
);对记录的线段列表,计算长度,取最长长度的线段(p1
max
,p2
max
):
[0015]
l
max
=max(len(p1
i
,p2
j
)|p1
i
∈p1,p2
i
∈p2);
[0016]
并在影像中标示该线段。
[0017]
优选的,所述步骤s3中根据超声图像中边缘的刻度所对应的实际长度,把该长度换算成物理实际长度,即得到胆胰管实际的物理宽度,并在影像中显示,当实际宽度超过实际阈值时,发出警示。
[0018]
优选的,所述警示为区域、线段的突出显示或警报提示。
[0019]
本发明提供了一种在超声胆胰管检查中胆胰管宽度的测量方法,利用人工智能图像识别和图像的几何测量方法,进行胆胰管实时识别、宽度实时测量,在发现胆胰管内径超过扩张阈值(胆管阈值为15mm,胰管阈值为2mm)时会发出告警信息,以防止胆胰管扩张的漏诊,解决了现有技术无法对胆胰管进行实时测量,仅能在怀疑胆胰管发生扩张的部位进行定点测量,因此进一步增加了漏诊风险的问题。
附图说明
[0020]
图1为本发明超声内镜检查图像有效区识别及裁剪示意图;
[0021]
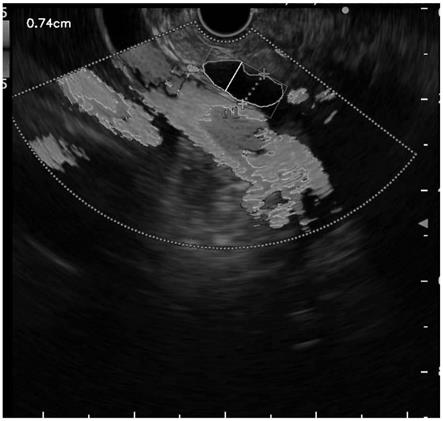
图2为本发明unet++识别胆胰管、最宽线段查找、最宽物理长度计算及标示示意图。
具体实施方式
[0022]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0023]
本发明提供一种技术方案:一种在超声胆胰管检查中胆胰管宽度的测量方法,包括如下步骤:
[0024]
s1、在超声内镜胆胰管的连续性扫描检查中,利用训练好的图像分割神经网络模型,实时识别获取超声内镜检查图像中胆胰管区域,并在影像中标示。
[0025]
如图1所示,图像分割神经网络模型包括两组unet++图像分割神经网络模型;第一组unet++图像分割神经网络模型实时识别获取超声内镜检查图像中的有效图像区域,并以其外切水平矩形裁剪图像;另一组unet++图像分割神经网络模型在裁剪图像中识别胆胰管区域。
[0026]
采用深度学习、卷积神经网络技术进行神经网络模型unet++的学习训练,以对目标区域进行识别。其中第一组unet++图像分割神经网络模型训练过程为:筛选出大量的内镜图像,对有效区域轮廓进行标记,并输入分割模型中进行训练。第二组unet++图像分割神经网络模型训练过程为:对裁剪后的图片进行胆胰管区域标记,利用胆胰管区域标记后的图像对分割模型进行训练。
[0027]
在本发明中分别识别出有效图像区,识别出有效图像区中的胆胰管区域,由围成该区域的点坐标序列p表示。
[0028]
s2、根据胆胰管区域边缘的坐标点序列,通过算法得到表征胆胰管区域最宽宽度的线段,并标示;计算过程如下:
[0029]
根据胆胰管区域首先得到最小外切矩形r,区域的点坐标序列为p,r的四个点为a、b、c、d,短边为ab、cd;遍历p的每个点,和ab组成三角形,计算三角形面积,找到面积最小三角形对应的点p
ab
:
[0030][0031]
同样的,找到cd对应的p
cd
;此时p被p
ab
、p
cd
分成了2部分p1、p2;遍历p1的每个点p1
i
,对每个点遍历p2的各个点p2
j
,这2个点形成一条线段p1
i
p2
j
,计算该线段与ab的夹角,记录下夹角小于10
°
的线段(p1
i
,p2
j
);
[0032]
对记录的线段列表,计算长度,取最长长度的线段(p1
max
,p2
max
):
[0033]
l
max
=max(len(p1
i
,p2
j
)|p1
i
∈p1,p2
i
∈p2);
[0034]
并在影像中标示该线段。
[0035]
s3、根据线段端点坐标计算其长度,当长度超过设定的线段阈值时,发出警示。如图2所示。
[0036]
根据超声图像中边缘的刻度所对应的实际长度,把该长度换算成物理实际长度,即得到胆胰管实际的物理宽度,并在影像中显示,当实际宽度超过实际阈值时,发出警示。警示为区域、线段的突出显示或警报提示。
[0037]
超声图像中的边缘刻度中,一个刻度和物理尺寸的对应关系为1cm,一个刻度在图像上的像素长度约为95,因此胆胰管的实际物理宽度为:
[0038]
l
实际
=l
max
/95(cm);
[0039]
并在影像中显示该实际物理宽度,对超过阈值的红色突出显示。
[0040]
本发明中,首先利用人工智能图像识别获取超声内镜检查图像中的有效图像区域,并以其外切水平矩形裁剪图像;在此基础上识别裁剪图像中的胆胰管区域,可以有效的避免超声内镜检查图像中的无效区域干扰胆胰管区域的识别。由于在超声胆胰管检查的全程中,图像中会实时显示胆胰管的区域,并对胆胰管宽度进行实时测量,只要超声胆胰管检查过程中胆胰管的任意一处超过扩张阈值都会发出告警信息,能有效的防止胆胰管扩张的漏诊,同时避免反复检查。从根本上解决了现有技术无法对胆胰管进行实时测量,仅能在怀疑胆胰管发生扩张的部位进行定点测量,因此进一步增加了漏诊风险的问题。
[0041]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1