基于北斗数据的营运车辆异常驾驶行为识别方法及系统
1.本发明涉及智能交通技术领域,尤其涉及一种基于北斗数据的营运车辆异常驾驶行为识别方法及系统。
背景技术:
2.近年来随着社会经济的不断发展,营运车辆保有量持续增加,客运和货运平均运距也呈显出不断增长的趋势,在带动周边经济增长的同时也为道路交通安全带来了巨大的挑战和风险。营运车辆由于在实际运行中往往乘车人数多或者载货物量大、长距离行驶、长时间连续行车以及途经道路环境复杂,并且速度较低、车身重、刹车距离长,是带来危险的风险源,极容易引发群死群伤的重大或特大交通事故。因此,对营运车辆异常驾驶行为的识别进行研究,对减少交通事故状况的发生,具有重要意义。
3.目前,车辆异常驾驶行为的识别研究主要为小轿车等非营运车辆研究,大致分为两类,一类是基于单一类型或多源融合的数据,通过挖掘车辆行驶的状态信息,基于车辆反映出的运行规律分析、辨识驾驶行为的基于数据驱动的驾驶行为辨识;一类是利用采集的数据,通过聚类算法,对驾驶行为进行评价的基于时空数据的驾驶行为聚类分析。由于小轿车等非营运车辆与营运车辆的行驶行为、距离和时间等特征不同,因此,采用现有的车辆异常驾驶行为识别方法,难以对营运车辆的异常驾驶行为进行准确且可靠的识别。
技术实现要素:
4.鉴于上述的分析,本发明实施例旨在提供一种基于北斗数据的营运车辆异常驾驶行为识别方法及系统,用以解决现有识别方法难以对营运车辆的异常驾驶行为进行准确且可靠识别的问题。
5.一方面,本发明实施例提供了一种基于北斗数据的营运车辆异常驾驶行为识别方法,包括:
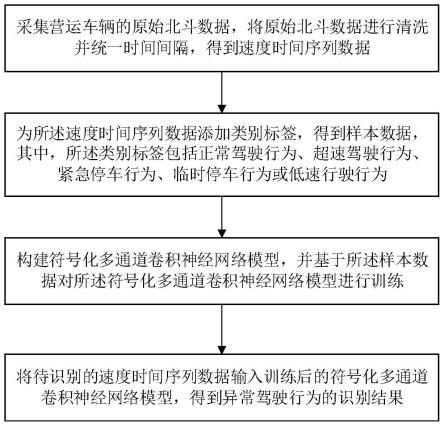
6.采集营运车辆的原始北斗数据,将原始北斗数据进行清洗并统一时间间隔,得到速度时间序列数据;
7.为所述速度时间序列数据添加类别标签,得到样本数据,其中,所述类别标签包括正常驾驶行为、超速驾驶行为、紧急停车行为、临时停车行为或低速行驶行为;
8.构建符号化多通道卷积神经网络模型,并基于所述样本数据对所述符号化多通道卷积神经网络模型进行训练;
9.将待识别的速度时间序列数据输入训练后的符号化多通道卷积神经网络模型,得到异常驾驶行为的识别结果。
10.进一步地,所述营运车辆包括客车、货车和危险品车;所述原始北斗数据包括车牌号、车辆类型、经度、纬度、定位仪速度和定位时间。
11.进一步地,所述将原始北斗数据进行清洗并统一时间间隔,包括以下步骤:
12.根据所述车牌号、经度、纬度、定位仪速度和定位时间将原始北斗数据中的相同数
据和异常数据进行删减,并对缺失速度数据进行填补,得到原始速度时间序列数据vo;
13.根据设定的时间间隔将原始速度时间序列数据vo中各时刻时间间隔统一;
14.基于统一时间间隔得到速度时间序列其中,tn时刻对应的速度值为:
[0015][0016]
式中,和表示原始时间序列vo中连续的和时刻的速度值,tn为统一时间间隔后在和时刻之间的时刻。
[0017]
进一步地,所述符号化多通道卷积神经网络模型包括:
[0018]
数据符号化层,用于将输入的速度时间序列数据符号化,得到静态时间序列数据和动态时间序列数据;
[0019]
第一卷积网络层,用于将所述数据符号化层输出的静态时间序列数据和动态时间序列数据以及输入的速度时间序列数据分别归一化后,分别进行卷积,得到特征参数;
[0020]
第二卷积网络层,用于将所述第一卷积网络层输出的特征参数合并后进行卷积和类别分类,得到并输出正常或异常驾驶行为的识别结果。
[0021]
进一步地,所述数据符号化层通过以下方式将输入的速度时间序列数据符号化,得到静态时间序列数据:
[0022]
将输入的营运车辆的速度时间序列划分成超速区间、正常速度区间、低速区间和停车区间;
[0023]
根据各区间的划分阈值将输入的速度时间序列数据中每个时间序列符号化表示,得到静态时间序列数据。
[0024]
进一步地,所述数据符号化层通过以下方式将输入的速度时间序列数据符号化,得到动态时间序列数据,包括以下步骤:
[0025]
依次提取速度时间序列数据vn中时刻tn和t
n+1
的速度值和并计算加速度
[0026]
若则和使用符号x0表示;其中,若n+1=n,则符号化结束,得到动态时间序列数据,否则n=n+1;
[0027]
若则使用符号-xn表示;其中,若n+1=n,则使用-x
n+1
表示,符号化结束,得到动态时间序列数据,否则n=n+1;
[0028]
若则使用符号xn表示;其中,若n+1=n,则使用x
n+1
表示,符号化结束,得到动态时间序列数据,否则n=n+1;
[0029]
其中,n表示时间序列数据vn中时刻的总个数。
[0030]
进一步地,a
limit
的取值为3。
[0031]
进一步地,所述第一卷积网络层包括3个独立卷积神经网络,每一所述独立卷积神经网络均包括依次连接的归一化层、一维卷积层、线性整流层和随机舍弃层;每一所述独立
卷积神经网络分别用于基于接收的静态时间序列数据、动态时间序列数据或速度时间序列数据进行归一化和卷积,得到相应的特征参数。
[0032]
进一步地,所述第二卷积网络层包括依次连接的合并层、一维卷积层、线性整流层、随机舍弃层、两个全连接层和softmax函数层。
[0033]
另一方面,本发明实施例提供了一种基于北斗数据的营运车辆异常驾驶行为识别系统,包括:
[0034]
数据获取模块,用于采集营运车辆的原始北斗数据,将原始北斗数据进行清洗并统一时间间隔,得到速度时间序列数据;
[0035]
样本数据获取模块,用于通过为所述速度时间序列数据添加类别标签,得到样本数据,其中,所述类别标签包括正常驾驶行为、超速驾驶行为、紧急停车行为、临时停车行为或低速行驶行为;
[0036]
模型构建模块,用于构建符号化多通道卷积神经网络模型,并基于所述样本数据对所述符号化多通道卷积神经网络模型进行训练;
[0037]
识别结果获取模块,用于将待识别的速度时间序列数据输入训练后的符号化多通道卷积神经网络模型,得到异常驾驶行为的识别结果。
[0038]
进一步地,所述数据获取模块中所述营运车辆包括客车、货车和危险品车;所述原始北斗数据包括车牌号、车辆类型、经度、纬度、定位仪速度和定位时间。
[0039]
与现有技术相比,本发明可实现如下有益效果:
[0040]
本发明提供的一种基于北斗数据的营运车辆异常驾驶行为识别方法及系统,首先采集和处理营运车辆的原始北斗数据得到样本数据,并利用样本数据训练构建的符号化多通道卷积神经网络模型,最后待识别的速度时间序列数据输入训练后的符号化多通道卷积神经网络模型,得到异常驾驶行为的识别结果,充分利用营运车辆的驾驶行为特征,进行数据的处理和构建模型,有效的提高了营运车辆异常行为识别的准确性和可靠性,为公路管理部门进行合理的管控提供支持依据,并且可协助对驾驶员的异常行为进行监控,进而提升道路安全程度。
[0041]
本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
[0042]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0043]
图1为本发明的具体实施例1中一种基于北斗数据的营运车辆异常驾驶行为识别方法的流程示意图;
[0044]
图2为本发明的具体实施例3中的混淆矩阵对比图。
具体实施方式
[0045]
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并
与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
[0046]
实施例1
[0047]
本发明的一个具体实施例1,公开了一种基于北斗数据的营运车辆异常驾驶行为识别方法,如图1所示,包括:
[0048]
s1、采集营运车辆的原始北斗数据,将原始北斗数据进行清洗并统一时间间隔,得到速度时间序列数据。
[0049]
实施时,所述营运车辆包括客车、货车和危险品车;所述原始北斗数据包括车牌号、车辆类型、经度、纬度、定位仪速度和定位时间。
[0050]
具体的,通过北斗车载终端采集客车、货车和危险品车的数据,并提取数据中的车牌号、车辆类型、经度、纬度、定位仪速度和定位时间6个字段作为原始北斗数据。
[0051]
实施时,所述将原始北斗数据进行清洗并统一时间间隔,包括以下步骤:
[0052]
s11、根据所述车牌号、经度、纬度、定位仪速度和定位时间将原始北斗数据中的相同数据和异常数据进行删减,并对缺失速度数据进行填补,得到原始速度时间序列数据vo。
[0053]
具体的,根据原始北斗数据中的车牌号、经度、纬度、定位仪速度和定位时间判断,若同一车辆在同一时刻采集到不同数据,则只保留第一条有效数据;考虑到营运车辆的最大行驶速度为180km/h,若数据中定位仪速度值超过180km/h,说明该数据的速度数据错误,则删除该数据;若车辆数据记录过少,则删除该数据,示例性地,数据记录少于5条;若车辆的经度和纬度变化,但定位仪速度为0,则用最近邻的均值填补定位仪速度。将原始北斗数据处理后,得到原始速度时间序列数据vo。
[0054]
s12、根据设定的时间间隔将原始速度时间序列数据vo中各时刻时间间隔统一。
[0055]
具体的,原始北斗数据采集的时间间隔不一致,得到的原始速度时间序列中速度值之间的时间间隔不一致,通过设定时间间隔使原始速度时间序列中速度之间的时间间隔相同,从而有助于后续符号化多通道卷积神经网络模型的训练,示例性地,设定的时间间隔可以为1秒、1.5秒或0.5秒。
[0056]
s13、基于统一时间间隔得到速度时间序列其中,tn时刻对应的速度值为:
[0057][0058]
式中,和表示原始时间序列vo中连续的和时刻的速度值,tn为统一时间间隔后在和时刻之间的时刻。
[0059]
s2、为所述速度时间序列数据添加类别标签,得到样本数据,其中,所述类别标签包括正常驾驶行为标签和异常驾驶行为标签(包括超速驾驶行为、紧急停车行为、临时停车行为或低速行驶行为)。可以理解的是,为所述速度时间序列数据添加类别标签,得到样本数据为后期进行符号化多通道卷积神经网络模型训练提供了支撑和依据。
[0060]
s3、构建符号化多通道卷积神经网络模型,并基于所述样本数据对所述符号化多通道卷积神经网络模型进行训练。
[0061]
实施时,所述符号化多通道卷积神经网络模型包括:
[0062]
数据符号化层,用于将输入的速度时间序列数据符号化,得到静态时间序列数据和动态时间序列数据;
[0063]
第一卷积网络层,用于将所述数据符号化层输出的静态时间序列数据和动态时间序列数据以及输入的速度时间序列数据分别归一化后,分别进行卷积,得到特征参数;
[0064]
第二卷积网络层,用于将所述第一卷积网络层输出的特征参数合并后进行卷积和类别分类,得到并输出正常或异常驾驶行为的识别结果。
[0065]
实施时,所述数据符号化层通过以下方式将输入的速度时间序列数据符号化,得到静态时间序列数据:
[0066]
将输入的营运车辆的速度时间序列划分成超速区间、正常速度区间、低速区间和停车区间。
[0067]
根据各区间的划分阈值将输入的速度时间序列数据中每个时间序列符号化表示,得到静态时间序列数据。
[0068]
具体的,若营运车辆是客车或货车,超速区间为超过100km/h、正常速度区间为60~100km/h、低速区间为0~60km/h和停车区间的划分阈值为0;若营运车辆是危险品车,超速区间为超过80km/h、正常速度区间为60~80km/h、低速区间为0~60km/h和停车区间的划分阈值为0。根据营运车辆的类型和输入的速度时间序列数据中每个时间序列的速度值,与区间的划分阈值用不同的符号表示,得到静态时间序列数据,示例性地,超速区间使用符号表示、正常速度区间使用符号表示、低速区间使用符号表示和停车区间使用符号表示。
[0069]
可以理解的,通过将速度时间序列划分区间进行符号化表示,可以使营运车辆在异常驾驶中的超速驾驶行为、低速驾驶行为和停车驾驶行为的特征更加明显,更有助于后续的第一卷积网络层提取出相关的特征,为第二卷积网络层的类别分类提供支撑,使得分类更加准确。
[0070]
实施时,所述数据符号化层通过以下方式将输入的速度时间序列数据符号化,得到动态时间序列数据,包括以下步骤:
[0071]
依次提取速度时间序列数据vn中时刻tn和t
n+1
的速度值和并计算加速度
[0072]
若则和使用符号x0表示;其中,若n+1=n,则符号化结束,得到动态时间序列数据,否则n=n+1;可以理解的,在速度时间序列数据中相邻时刻的速度值的加速度在设定的范围内时,两个时刻的速度值均使用符号x0表示;如果n+1=n,也就是说,提取到的是速度时间序列数据中最后相邻时刻的速度值,此时速度时间序列数据中的速度值均已用符号表示,可得到动态时间序列数据。
[0073]
若则使用符号-xn表示;其中,若n+1=n,则使用-x
n+1
表示,符号化结束,得到动态时间序列数据,否则n=n+1;可以理解的,在速度时间序列数据中相邻时刻的速度值的加速度小于设定的范围时,前一时刻的速度值使用符号-xn表示;如果n+1=n,也就是说,提取到的是速度时间序列数据中最后相邻时刻的速度值,此时将后一时刻即速度时间序列数据中最后时刻的速度值用-x
n+1
表示,此时速度时间序列数据均已用符号
表示,可得到动态时间序列数据。
[0074]
若则使用符号xn表示;其中,若n+1=n,则使用x
n+1
表示,符号化结束,得到动态时间序列数据,否则n=n+1;可以理解的,在速度时间序列数据中相邻时刻的速度值的加速度大于设定的范围时,前一时刻的速度值使用符号xn表示;如果n+1=n,也就是说,提取到的是速度时间序列数据中最后相邻时刻的速度值,此时将后一时刻即速度时间序列数据中最后时刻的速度值用x
n+1
表示,此时速度时间序列数据均已用符号表示,可得到动态时间序列数据。
[0075]
其中,n表示时间序列数据vn中时刻的总个数。
[0076]
应当注意的是,x0可以使用任意字符,示例性的,x0可以为xxnn可以使用任意与x0不同的字符,且下标n不同xn使用不同的符号表示,也就是说,xn使用的符号不能重复,示例性的,xn可以根据n的不同使用或等依次类推,-xn可以根据n的不同使用或等依次类推。
[0077]
可以理解的,通过将速度时间序列根据相邻的时刻的加速度符号化表示,可以使营运车辆在异常驾驶中的紧急停车和临时停车的特征更加明显,更有助于后续的第一卷积网络层提取出相关的特征,为第二卷积网络层的类别分类提供支撑,使得分类更加准确。
[0078]
具体地,a
limit
的取值为3。可以理解的,将a
limit
设置为3,可以更好的识别车辆停车过程中是紧急停车行为或者临时停车行为,使得动态时间序列数据能够更好的反映异常驾驶中的紧急停车行为。
[0079]
具体地,所述第一卷积网络层包括3个独立卷积神经网络,每一所述独立卷积神经网络均包括依次连接的归一化层、一维卷积层、线性整流层和随机舍弃层;每一所述独立卷积神经网络分别用于基于接收的静态时间序列数据、动态时间序列数据或速度时间序列数据进行归一化和卷积,得到相应的特征参数。更具体地,归一化层将接收的数据映射到0~1之间的数字,以供一维卷积层处理;一维卷积层将接收的归一化后的数据进行卷积操作;线性整流层使用relu函数将独立卷积神经网络进行非线性化处理,以得到特征图;随机舍弃层基于bernoulli分布的随机变量向量将接收的特征图进行随机舍弃,以解决过拟合问题并且减少计算成本,随机舍弃后的特征图即为相应的特征参数。
[0080]
具体地,所述第二卷积网络层包括依次连接的合并层、一维卷积层、线性整流层、随机舍弃层、两个全连接层和softmax函数层。更具体的,合并层利用keras的concatenate函数将接收的第一卷积网络层输出的3个特征参数进行合并;一维卷积层将接收的合并后的特征进行卷积操作;线性整流层使用relu函数将第二卷积网络层进行非线性化处理,以得到特征图;随机舍弃层基于bernoulli分布的随机变量向量将接收的特征图进行随机舍弃,得到特征图;两个全连接层和softmax函数层的组合结构将接收的特征图进行分类,以得到正常或异常驾驶行为的分类结果。可以理解的,通过第一卷积网络层中3个卷积神经网络分别对数据进行特征提取,将营运车辆的总体驾驶行为以及营运车辆异常驾驶行为的特征提取出来更具针对性,得到的特征参数能够更好的反映营运车辆的驾驶行为,再通过第二卷积网络层将提取的特征合可以得到更准确的类别分类。
[0081]
实施时,基于所述样本数据对所述符号化多通道卷积神经网络模型进行训练,具
体是将样本数据分为训练集和测试集,利用训练集对构建好的符号化多通道卷积神经网络模型进行训练,调整模型中第一卷积网络层和第二卷积网络层中的参数,得到训练好的符号化多通道卷积神经网络模型,再利用测试集对模型进行测试验证,得到最优的模型。
[0082]
s4、将待识别的速度时间序列数据输入训练后的符号化多通道卷积神经网络模型,得到异常驾驶行为的识别结果。
[0083]
与现有技术相比,本发明提供的一种基于北斗数据的营运车辆异常驾驶行为识别方法,首先采集和处理营运车辆的原始北斗数据得到样本数据,并利用样本数据训练构建的符号化多通道卷积神经网络模型,最后待识别的速度时间序列数据输入训练后的符号化多通道卷积神经网络模型,得到异常驾驶行为的识别结果,充分利用营运车辆的驾驶行为特征,进行数据的处理和构建模型,有效的提高了营运车辆异常行为识别的准确性和可靠性,为公路管理部门进行合理的管控提供支持依据,并且可协助对驾驶员的异常行为进行监控,进而提升道路安全程度。
[0084]
实施例2
[0085]
本发明的一个具体实施例2,公开了一种基于北斗数据的营运车辆异常驾驶行为识别系统,其特征在于,包括:
[0086]
数据获取模块,用于采集营运车辆的原始北斗数据,将原始北斗数据进行清洗并统一时间间隔,得到速度时间序列数据;
[0087]
样本数据获取模块,用于通过为所述速度时间序列数据添加类别标签,得到样本数据,其中,所述类别标签包括正常驾驶行为、超速驾驶行为、紧急停车行为、临时停车行为或低速行驶行为;
[0088]
模型构建模块,用于构建符号化多通道卷积神经网络模型,并基于所述样本数据对所述符号化多通道卷积神经网络模型进行训练;
[0089]
识别结果获取模块,用于将待识别的速度时间序列数据输入训练后的符号化多通道卷积神经网络模型,得到异常驾驶行为的识别结果。
[0090]
实施时,所述数据获取模块中所述营运车辆包括客车、货车和危险品车;所述原始北斗数据包括车牌号、车辆类型、经度、纬度、定位仪速度和定位时间。
[0091]
需要说明的是,由于本实施例识别系统与前述识别方法相关之处可相互借鉴,此处为重复描述,故这里不再赘述。由于本系统实施例与上述方法实施例原理相同,所以本系统也具有上述方法实施例相应的技术效果。
[0092]
实施例3
[0093]
为验证本发明实施例1和实施例2中模型的有效性,本发明的具体实施例3中采用4000组添加标签的车辆速度时间序列数据,即样本数据,其中,正常驾驶数据、超速驾驶数据、紧急停车数据、临时停车数据和低速驾驶数据各800组。本实施例中将训练集与测试集按照4:1的比例划分,即3200组样本数据用于模型训练,800组样本数据用于模型验证。
[0094]
本实施例中还选取了独立的卷积神经网络模型(convolutional neural networks,cnn)和多通道卷积神经网络模型(multi-scale convolutional neural network,mcnn)与本发明中的符号化多通道卷积神经网络模型(time series symbolic multi-scale convolutional neural network,tsa_mcnn)进行对比分析,在处理器为intel i5-6300hq,系统内存8.0gb,系统是windows10(64位),程序语言为python3.7的实验
平台下可得到3个模型的识别分析如下表所示。
[0095][0096]
由上表中可知:
[0097]
(1)tsa_mcnn模型的识别驾驶行为的总准确率明显高于cnn模型与mcnn模型,分别高出了19.88%与13.25%。三种模型的kappa系数的大小也表明tsa_mcnn模型的准确率大于mcnn模型与cnn模型的准确率,可以看出,tsa_mcnn模型的准确率更好。
[0098]
(2)由于危险车辆的限速值与客货车的限速值不同,三种模型在识别区分正常驾驶行为与超速驾驶的效果不同。cnn模型在对正常驾驶与超速驾驶的精确率、召回率与f1分数均较低;mcnn模型对于正常驾驶具有较低的精确率与良好的召回率与f1分数,对于超速驾驶具有较低的召回率与良好的精确率与f1分数;tsa_mcnn模型对于两种驾驶行为均具有优秀的召回率、精准率与f1分数。可以看出,tsa_mcnn模型对于三种类型车辆的超速驾驶行为与正常驾驶行为识别效果更好。
[0099]
(3)由车辆临时停车行为与紧急停车行为由急变速阈值a
limit
区分,三种模型在两种行为上的识别区分效果不同。cnn模型在对临时停车行为与紧急停车行为的精确率、召回率与f1分数均较低,其中紧急停车的召回率接近0.56;mcnn模型对于临时停车行为与紧急停车行为具有良好的召回率、精确率与f1分数;tsa_mcnn模型具有优秀的召回率、精确率与f1分数;可以看出,tsa_mcnn模型能很好的识别临时停车行为与紧急停车行为。
[0100]
(4)对于低速驾驶行为,相对其他四种行为在速度时间序列上具有较为突出的特征,三种模型对低速驾驶行为的均具有优秀的召回率、精确率与f1分数。
[0101]
综上所述,tsa_mcnn模型在营运车辆的异常驾驶行为识别效果更好。
[0102]
如图2所示,通过三个模型的混淆矩阵对比图可以看出,tsa_mcnn模型在营运车辆的异常驾驶行为识别上更加准确,明显优于cnn模型和mcnn模型。
[0103]
本领域技术人员可以理解,实现上述实施例方法的全部或部分流程,可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于计算机可读存储介质中。其中,所述计算机可读存储介质为磁盘、光盘、只读存储记忆体或随机存储记忆体等。
[0104]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,
都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1